Содержание
Кинематические схемы манипуляторов
Кинематические схемы манипуляторов
Введем ряд понятий, которыми будем пользоваться в дальнейшем.
Объем, обслуживаемый манипулятором, или обслуживаемый объем — заданное множество точек пространства, в которых манипулятор выполняет заданные функции.
Рабочий объем манипулятора — объем, в котором двигаются звенья манипулятора при выполнении функциональных задач в обслуживаемом объеме.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Обслуживаемая зона — множество точек базовой плоскости, образованной движением плеча и предплечья, в которой располагается центр захвата при выполнении функциональных задач в обслуживаемом объеме.
Рабочая зона манипулятора — площадь в базовой плоскости, в которой двигаются звенья манипулятора при выполнении рабочих операций в обслуживаемом объеме.
Под манипулятором обычно понимают техническое устройство, предназначенное для воспроизведения некоторых двигательных функций верхних конечностей человека. Будем считать, что объем движений человека представляет собой множество точек пространства, в которое кисти человека могут попасть при условии, что человек не сходит с места (ступни ног неподвижны). Тогда движение человека приблизительно можно разделить на три группы. К первой группе относятся глобальные движения, объем которых намного больше объема движений человека. Эти движения осуществляются с помощью нижних конечностей человека. Вторую группу составляют региональные движения; их объем соизмерим с объемом движений человека. Региональные движения выполняются в основном крупными суставами верхних конечностей человека. Наконец, к третьей группе относятся локальные движения, объем которых мал по сравнению с объемом движений человека. Эти движения выполняются с помощью кистей рук. По аналогии с этим можно ввести понятия глобальных, региональных и локальных движений и для манипуляторов.
В таком случае к глобальным движениям следует отнести перемещение манипулятора в пространстве с помощью двигательной системы, например перемещение манипулятора с электрокаром, на котором он установлен. В некоторых типах манипулятора глобальные движения могут отсутствовать, например в случае стационарного манипулятора.
К региональным движениям манипулятора можно отнести те движения, которые изменяют положение захвата или груза в пространстве, а к локальным — те, которые изменяют ориентацию груза или захвата. Введенные выше понятия обслуживаемого объема относятся к региональным и локальным движениям, когда носитель манипулятора неподвижен.
Кинематические схемы манипуляторов делятся на две группы. В первой группе используется принцип упорядоченного расположения звеньев и кинематических пар,, причем всегда имеется, по крайней мере, одна пара кинематически связанных звеньев,_ обеспечивающая перенос рабочего органа в базовой плоскости. Использование еще одной степени подвижности кинематической схемы обеспечивает движение базовой плоскости в пространстве и образование обслуживаемого объема. Во второй группе кинематических схем используется произвольное расположение звеньев и кинематических пар, при этом движение, например в плоскости, может быть организовано использованием совместной работы не менее трех кинематических пар. При этом законы движения звеньев (даже при простых законах движения рабочего органа) оказываются очень сложными, поэтому эта группа кинематических схем получила наименьшее распространение.
Во второй группе кинематических схем используется произвольное расположение звеньев и кинематических пар, при этом движение, например в плоскости, может быть организовано использованием совместной работы не менее трех кинематических пар. При этом законы движения звеньев (даже при простых законах движения рабочего органа) оказываются очень сложными, поэтому эта группа кинематических схем получила наименьшее распространение.
На рис. 1 изображена кинематическая схема манипулятора, движение в базовой плоскости которого обеспечивается двумя шарнирно-сочлененными звеньями, плечом и предплечьем. Выполняя, например, вращение схемы вокруг оси Y, получим круговой обслуживаемый объем. Если же кинематической схеме обеспечено продольное движение вдоль оси Z, то получим обслуживаемый объем в виде параллелепипеда при обслуживаемой зоне прямоугольной формы, характерной для погрузочных манипуляторов. Схема манипулятора является антропоморфной и ее преимущественное применение объясняется традицией и рядом конструктивных достоинств. В работе указывается, что вид кинематической схемы задающего устройства должен быть определенным образом связан с видом кинематической схемы руки человека, что и предопределяет применение для копирующих манипуляторов кинематических схем, содержащих в основном вращательные пары. Из-за конструктивных трудностей, связанных с получением достаточно больших перемещений (больше 0,5 м) поступательных пар, они находят ограниченное применение в манипуляторах. При разработке копирующих манипуляторов возникают трудности с созданием кинематически подобных управляющих механизмов с высокой чувствительностью.
В работе указывается, что вид кинематической схемы задающего устройства должен быть определенным образом связан с видом кинематической схемы руки человека, что и предопределяет применение для копирующих манипуляторов кинематических схем, содержащих в основном вращательные пары. Из-за конструктивных трудностей, связанных с получением достаточно больших перемещений (больше 0,5 м) поступательных пар, они находят ограниченное применение в манипуляторах. При разработке копирующих манипуляторов возникают трудности с созданием кинематически подобных управляющих механизмов с высокой чувствительностью.
Рис. 1. Обслуживаемые объемы манипуляторов
Рис. 2. Кинематические схемы манипуляторов для получения движения в базовой плоскости
Антропоморфная кинематическая схема манипулятора не является единственным вариантом. Как указывалось ранее, для получения движения в базовой плоскости минималь-
ное число кинематических пар равно двум. На рис. 2. изображены схемы манипуляторов для получения движения в базовой плоскости, содержащие соответственно две вращательные пары (а), вращательную и поступательную пару (б), поступательную и вращательную пару (в) и две поступательные пары (г). Осуществляя поворот этих схем с помощью вращательной пары, получим круговые обслуживаемые объемы, а обеспечив движение этих схем, например в плоскости перпендикулярной базовой плоскости, получим протяженный обслуживаемый объем, имеющий в сечении перпендикулярном направлению переноса форму обслуживаемой зоны. Наличие указанных трех кинематических пар позволяет осуществить перенос рабочего органа в пространстве. Однако с целью обеспечения заданной ориентации рабочего органа манипулятор должен быть оснащен еще добавочными звеньями с приводами. Общее число степеней подвижности кинематической схемы манипулятора (в этом случае для произвольной ориентации предметов) должно быть равно шести. Однако, если ради простоты используется раздельное управление каждым приводом, то шести степеней подвижности оказывается уже недостаточным для выполнения рабочих операций с предметами, связанными кинематически с неподвижными объектами. Поясним это на простейшем примере. Для того чтобы поднять и повернуть ящик письменного стола для его установки в направляющие, достаточно иметь манипулятор с шестью степенями подвижности.
Осуществляя поворот этих схем с помощью вращательной пары, получим круговые обслуживаемые объемы, а обеспечив движение этих схем, например в плоскости перпендикулярной базовой плоскости, получим протяженный обслуживаемый объем, имеющий в сечении перпендикулярном направлению переноса форму обслуживаемой зоны. Наличие указанных трех кинематических пар позволяет осуществить перенос рабочего органа в пространстве. Однако с целью обеспечения заданной ориентации рабочего органа манипулятор должен быть оснащен еще добавочными звеньями с приводами. Общее число степеней подвижности кинематической схемы манипулятора (в этом случае для произвольной ориентации предметов) должно быть равно шести. Однако, если ради простоты используется раздельное управление каждым приводом, то шести степеней подвижности оказывается уже недостаточным для выполнения рабочих операций с предметами, связанными кинематически с неподвижными объектами. Поясним это на простейшем примере. Для того чтобы поднять и повернуть ящик письменного стола для его установки в направляющие, достаточно иметь манипулятор с шестью степенями подвижности. Однако без седьмого движения, в данном случае поступательно-прямолинейного, нельзя было бы вдвинуть ящик в стол иначе, как используя одновременно сложную комбинацию шести движений.
Однако без седьмого движения, в данном случае поступательно-прямолинейного, нельзя было бы вдвинуть ящик в стол иначе, как используя одновременно сложную комбинацию шести движений.
В то же время практикой установлено, что мысленная координация трех одновременно производимых движений является верхним пределом возможности человека. В связи с этим создание погрузочных манипуляторов с совмещенным управлением и с визуальной обратной связью является на сегодняшний день единственным способом, позволяющим эффективно использовать ма-нипуляционные устройства для выполнения различных технологических операций.
Анализ конструкций промышленных манипуляторов показывает, что в действительности и уменьшенное число степеней подвижности манипулятора позволяет эффективно выполнять рабочие операции, не усложняя конструкцию манипулятора.
Действительно промышленные манипуляторы работают в организованном пространстве, где рабочие плоскости строго упорядочены и, как правило, лежат в горизонтальной и вертикальной плоскостях. В этом случае достаточно обеспечить качание рабочего органа и его ротацию, чтобы можно было выполнить операцию штабелирования грузов.
В этом случае достаточно обеспечить качание рабочего органа и его ротацию, чтобы можно было выполнить операцию штабелирования грузов.
Очевидно, что движение в базовой плоскости можно получить и большим числом кинематических пар, выполняя, например, одно из звеньев кинематической схемы переменной длины, т. е. снабдив механизм еще одной поступательной парой или шарнирно присоединив добавочное звено. В этом случае одну и ту же траекторию оси кистевого шарнира можно получить бесконечным множеством сочетаний различных законов движения звеньев. Например, в простейшем случае из работы могут поочередно отключаться те или иные приводы звеньев. В связи с этим рассмотрим понятие маневренности манипулятора. Под маневренностью манипулятора понимается степень подвижности его кинематической схемы при жестком соединении губок захвата с неподвижным предметом. На рис. 4 и 5 изображены кинематические манипуляторы, у которых захваты зажимают неподвижные объекты. Легко убедиться, что кинематическая схема манипулятора потеряла всякую подвижность и превратилась в ферму, а кинематическая схема имеет возможность менять свою конфигурацию благодаря применению предплечья переменной длины. Представляется целесообразным ввести понятие
Представляется целесообразным ввести понятие
Рис. 3. Кинематические схемы манипуляторов с базовой маневренностью
Рис. 4. Кинематическая схема манипулятора
Рис. 5. Кинематическая схема манипулятора
При этом учитываются только те кинематические пары, оси которых могут занимать положение перпендикулярное базовой плоскости для шарниров или лежать в плоскости параллельной ей для поступательных пар.
Воспользовавшись этой формулой, можно установить, что кинематические схемы рис. 2 и 4 обладают нулевой базовой маневренностью, а кинематические схемы рис. 3 и 5 — базовой маневренностью, равной единице. Для определения маневренности манипулятора в целом воспользуемся формулой Озола для пространственных одноконтурных механизмов
По этой формуле можно установить, что маневренность манипулятора равна нулю. Однако при определении маневренности манипулятора также получается, что он обладает нулевой маневренностью, но как было установлено выше, этот манипулятор обладает базовой маневренностью, равной единице.
Понятие маневренности манипулятора введено для случая взаимодействия манипулятора с предметами, связанными с неподвижными объектами. Представляет интерес рассмотреть вопрос и о траекторной маневренности.
Траекторная маневренность показывает, что за счет степеней подвижности, например рабочего органа, на определенном участке траектории она может определяться изменением закона движения не только базовых звеньев, но и самого рабочего органа. Причем, если контролируется положение только центра губок схвата, то фактическая траекторная маневренность для кинематической схемы равна двум. Если же контролируется положение какой-либо точки предмета, не совпадающей с точкой С, то траекторная маневренность равна трем. Траекторная маневренность равна трем и в том случае, если ось губок захвата не совпадает с осью кисти.
Повышение числа степеней маневренности манипуляторов позволяет выполнять достаточно сложное движение в ограниченных рабочих объемах и при наличии препятствий в обслуживаемых объемах, решать задачи уменьшения энергозатрат за счет выбора оптимальных законов движения, а также повышает надежность системы, так как при выходе из строя, например, одного из приводов, возможно частичное выполнение задач.
2. Кинематические схемы пр
Манипулятор
промышленного робота является многозвенным
механизмом с последовательным соединением
звеньев и разомкнутой кинематической
цепью. Кинематическая схема манипулятора
представляет собой соединение звеньев,
определяющих основные движения схвата
робота в рабочей зоне, и описывается в
системе координат (СК), оси которой
целесообразно совместить с направлениями
основных перемещений схвата, так как
это упрощает математическое описание
движений манипулятора. Наиболее
распространены пространственные
манипуляторы, работающие в сферической,
цилиндрической, декартовой или ангулярной
системах координат. Гораздо реже
используются плоские манипуляторы.
Ангулярная система координат
характеризуется тем, что перемещение
объекта манипулирования обеспечивается
согласованным взаимным поворотом
звеньев ПР, имеющих постоянную длину.
Эта система координат оказалась весьма
удобной для производственных роботов.
Роботы, использующие ангулярную СК,
называются антропоморфными ПР. Они
Они
более компактны по сравнению с
традиционными конструкциями манипуляторов,
которые являются комбинацией вращательных
и поступательных кинематических пар.
Звенья манипулятора соединяются
кинематическими парами пятого класса,
т.е. каждое звено может иметь только
одну степень подвижности относительно
предыдущего звена, так что возможно
либо вращательное, либо поступательное
движение последующего звена относительно
предыдущего.
Свойства
и характеристики ПР в значительной
степени определяются кинематической
схемой, основная функция которой
заключается в подводе схвата в заданную
точку пространства с определенной
ориентацией. Исходя из выполнения этой
основной функции, зависящей в свою
очередь от технологического процесса,
должны выполняться кинематические
схемы конкретных ПР. Кроме того,
кинематические схемы ПР должны
обеспечивать по возможности не зависимое
управление всеми координатами, допускать
при необходимости определенную
маневренность, соответствовать типу
применяемого привода и образовывать с
ним органическое единство. На рисунке
На рисунке
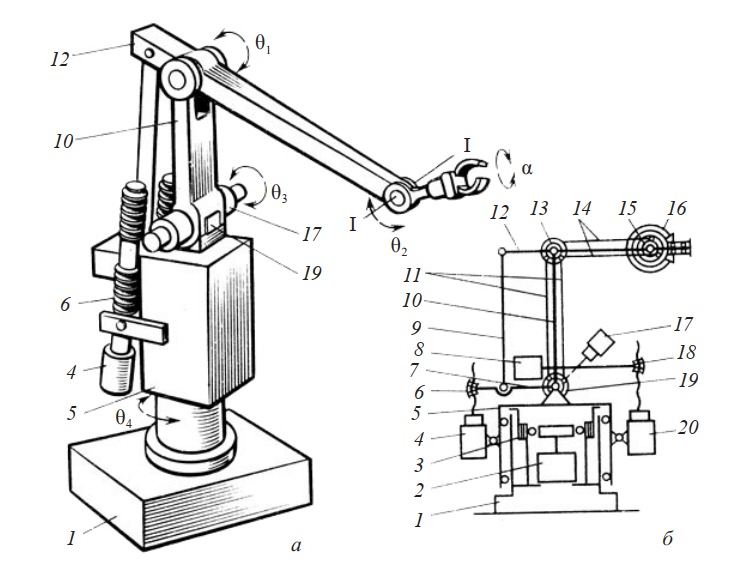
1 изображена кинематическая схема
манипулятора с датчиком системы
силомоментного очувствления.
Рисунок
1 — Кинематический схема манипулятора
с датчиком СМО
Кинематическая
схема манипулятора зависит от требований
технологического процесса и, в свою
очередь, влияет на построение многомерной
системы взаимосвязанных следящих
приводов, определяет степень взаимного
влияния звеньев манипулятора и объем
информации, связанный с преобразованием
координат при управлении ПР.
Напольные
роботы с касающейся выдвижной рукой
работают в сферической и цилиндрической
СК. Универсальные роботы с этой
конструктивной схемой работают в
сферической системе координат. К роботам
этой группы относится и первый промышленный
робот «Юнимейт». Также, существуют
промышленные роботы «Пума»,
предназначенные для выполнения быстрых
сборочных операций в приборостроительной
и электронной промышленности.
Целью
кинематического анализа является
определение положения, скорости и
ускорения произвольной точки звена
исполнительного механизма (чаще всего
схвата) в различных системах координат.
В механике различают прямую и обратную
задачи. При решении прямой задачи
определяется положение схвата относительно
неподвижной системы координат при
известном взаимном расположении звеньев.
Обратная задача чаще бывает труднее.
Для
аналитического описания исполнительной
системы промышленного робота (манипулятора)
можно воспользоваться различными
методами (методы Калицына, Кислицына и
др.). В последнее время наиболее часто
для решения подобных задач применяется
метод, основанный на матричном
преобразовании однородных координат.
В
ПР в основном используются кинематические
пары V
класса, допускающие относительное
движение только по одной координате.
Реже используются пары IV
класса, допускающие относительное
движение по двум координатам. Например,
простое шарнирное соединение двух
звеньев образует пару V
класса, а карданное соединение – пару
IV
класса.
Важной
характеристикой ПР является рабочая
зона, под которой понимают объем,
ограниченный поверхностью, представляющей
собой геометрическое место точек
возможных конечных положений схвата.
Иногда используют понятие сервисного
пространства (зоны обслуживания) как
части рабочей зоны, в любой точке которой
схват может быть ориентирован заданным
образом.
Для
перемещения объекта манипулирования
(схвата) в любую точку пространства
необходимо иметь определенное число
степеней подвижности. Перед проектировщиками
ПР возникает вопрос, сколько степеней
подвижности должен иметь проектируемый
ПР.
Большое
влияние на свойства и возможности ПР
оказывает выбор компоновки транспортирующих
координат. В настоящее время в робототехнике
в качестве транспортирующих наиболее
широко используются кинематические
цепи, работающие в прямоугольной,
цилиндрической и сферической системах
координат.
[Решено] 3) Получить модель прямой и обратной кинематики для манипулятора,…
ec aliquet. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac
Fusce dui lectus, congue vel laoreet ac
Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Donec aliquet
Разблокировать полный доступ к Course Hero
Изучите более 16 миллионов пошаговых ответов из нашей библиотеки
Подпишитесь, чтобы посмотреть ответ
ilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante,
gue
ipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. На
Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. На
Пошаговое объяснение
consectetur adipis
entesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ult
- ipiscing elit. Нам а. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laor
- risus ante, dapibu ia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio.
 Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscin
Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscin
 Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscin
Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscince dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie conequat, ult
Итур Лаореет. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit ame
nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvina
ce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец алик
- облегчение. Pellentesque dapibus efficitur laoreet
- usce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor
- , consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque
- нг элит. Nam lacinia pulvinar tortor nec facilisis. Pel
- ipiscing elit. Nam lacinia pulvinar tortor nec faci
 Донец Аликет. Lorem ipsum dolor
Донец Аликет. Lorem ipsum dolorec fac l s a molest
acinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie conequat, ult
acinia pulvinar tortor nec facilisis. Pellentesque dapi
gue
Fusce dui lectus, congue vel
ia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, c
ec aliquet. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue
Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue
gue
ac, dictum vitae odio. Done
ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio.
Итур Лаореет. Nam risus ante, dapibus a
a mole dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor
ипсум д а. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit.
ec fac ia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a
gue
ctum vitae odio. Донец Аликет. Lo
ia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Нам рисус анте, дапиб
Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Нам рисус анте, дапиб
Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lec
gue
nec facilisis. Pellentesque dapib
ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna. Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a mol
Fusce dui lectus, congue vel laoreet ac, dictum vitae odio. Донец Аликет. Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a mol
gue
fficitur laoreet. Nam risus ante, dapibus am
ipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat
at, ultrices ac magna. Fusce dui lec
m ipsum dolor sit amet, consectetur adipiscing elit. Nam lacinia pulvinar tortor nec facilisis. Pellentesque dapibus efficitur laoreet. Nam risus ante, dapibus a molestie consequat, ultrices ac magna.
Как рассчитать переднюю кинематику робота за 5 простых шагов
Расчет прямой кинематики часто является первым шагом к использованию нового робота. Но как начать?
Несмотря на то, что в Интернете доступно несколько хороших руководств, до сих пор не было простого пошагового руководства для расчета прямой кинематики.
Вот простое руководство по расчету кинематики любого робота-манипулятора.
[С тех пор, как я впервые опубликовал эту статью в 2015 году, она стала одной из наших самых популярных статей! С тех пор я обновил и улучшил его, но основная простота осталась прежней..]
Вычисление кинематики является краеугольным камнем для инженеров-робототехников. Но кинематика иногда может быть проблемой (например, понимание разницы между прямой и обратной кинематикой).
Когда я впервые начал заниматься исследованиями в области робототехники, мне часто говорили: «иди и рассчитай переднюю кинематику этого робота». По сути, эта фраза является сокращением для исследования робототехники для «иди и познакомься с этим роботом».
Расчет прямой кинематики является жизненно важным первым шагом при использовании любого нового робота в исследованиях, особенно для манипуляторов.
Несмотря на то, что я изучил теорию кинематики в университете, только когда я рассчитал различные кинематические решения для нескольких реальных роботов, весь процесс стал интуитивно понятным. Даже тогда, поскольку я не рассчитывал кинематику каждый день, мне приходилось возвращаться к своим заметкам, чтобы напоминать себе, как это сделать, каждый раз, когда я сталкивался с новым роботом.
Даже тогда, поскольку я не рассчитывал кинематику каждый день, мне приходилось возвращаться к своим заметкам, чтобы напоминать себе, как это сделать, каждый раз, когда я сталкивался с новым роботом.
Было бы очень полезно иметь пошаговое руководство по этапам прохождения. Таким образом, мне не пришлось бы читать сотни страниц академически написанных уравнений в учебниках.
Что-то вроде «шпаргалки» по кинематике было бы полезно.
Этот пост как раз и есть шпаргалка.
В первую очередь я сосредоточусь на подходе Деванита-Хартенберга (DH) к прямой кинематике, поскольку он является наиболее распространенным.
Надеюсь, вам понравится!
Шаг 1: Возьмите карандаш и бумагу
При запуске нового робота может возникнуть соблазн сразу же перейти к компьютеру. Однако, даже если робот выглядит как «стандартный» манипулятор 6R (наиболее распространенный тип робота), я всегда сажусь с карандашом и бумагой, чтобы нарисовать кинематическую схему.
Это простое задание заставляет вас тщательно рассмотреть реальную физическую конфигурацию робота, избегая ложных предположений, которые могут нанести ущерб позже во время кодирования.
Существуют различные способы рисования кинематической цепи. Выберите любой стиль, который вы предпочитаете.
Я предпочитаю простые цилиндры для поворотных соединений и линии для звеньев, как показано на рисунке. Выполните поиск картинок в Google по запросу «кинематическая диаграмма» и просмотрите несколько доступных стилей.
Во время рисования определите, в каком направлении движется каждый сустав, и нарисуйте это движение в виде двусторонних стрелок на диаграмме.
Шаг 2: Определение осей
Следующим важным шагом является нанесение осей на каждый сустав. Подход DH назначает разные оси каждому подвижному суставу.
Если правильно настроить оси, работать с роботом будет легко. Настройте их неправильно, и вы будете страдать бесчисленными головными болями. Эти оси потребуются симуляторам, решателям обратной кинематики и вашим коллегам в вашей команде (никто не хочет решать решение прямой кинематики, если это уже сделал кто-то другой).
Эти оси потребуются симуляторам, решателям обратной кинематики и вашим коллегам в вашей команде (никто не хочет решать решение прямой кинематики, если это уже сделал кто-то другой).
Посмотрите это видео, чтобы узнать, как их настроить:
Две важные оси для работы:
- Ось Z — Ось Z должна лежать на оси вращения вращательного шарнира или оси растяжения призматического шарнира.
- Ось X — Ось X должна лежать вдоль «общей нормали», которая является кратчайшей ортогональной линией между предыдущей осью Z и текущей осью Z (серьезно, посмотрите видео).
- Ось Y — После того, как вы рассчитали две другие, эта ось должна встать на свои места, следуя «правилу правой руки» (см. ниже).
Лично я рисую оси, используя следующую раскраску: ось z (синяя) , ось x (красная) и ось y (зеленая) . Кстати, это цветовая схема, которая используется в визуализаторе RViz от ROS, которую я широко использовал во время работы над диссертацией.
Кстати, это цветовая схема, которая используется в визуализаторе RViz от ROS, которую я широко использовал во время работы над диссертацией.
Еще когда я был студентом, наш лектор посоветовал нам сделать ось «скульптуру» из трех цветных соломинок, воткнутых в сферу синей гвозди, чтобы объяснить нам теорию. Хотя это может показаться немного «игровой школой», это может быть очень полезно, поскольку вы можете расположить скульптуру рядом с физическим роботом, чтобы убедиться, что оси указывают в правильном направлении. Чтобы получить виртуальную версию, воспользуйтесь этим интерактивным инструментом.
В качестве альтернативы вы можете использовать «правило правой руки».
Правило правой руки
Быстрый и простой способ запомнить направление оси Y — следовать правилу правой руки. Это мнемоника (помощь для запоминания), широко используемая в физике для запоминания ориентации трехмерной оси.
Чтобы использовать его, вытяните правую руку перед собой, вытянув большой, указательный и средний пальцы под углом 90 градусов друг к другу. Каждый палец соответствует оси:
Каждый палец соответствует оси:
- Большой палец = ось Z.
- Указательный палец = ось x.
- Средний палец = ось Y.
При направлении большого и указательного пальцев вдоль осей z и x шарнира робота, ваш средний палец естественным образом упадет в направлении оси y.
Шаг 3: Запомните свой концевой эффектор
Цель расчета прямой кинематики состоит в том, чтобы иметь возможность рассчитать положение конечного эффектора по положению суставов.
В большинстве учебных пособий по прямой кинематике конечный эффектор рассматривается как одно расстояние от конечного сустава. Это нормально для простого захвата «открыть-закрыть». Однако, поскольку современные захваты часто более сложны, стоит рассмотреть, как работает концевой эффектор.
Например, 3-пальцевый адаптивный захват Robotiq имеет несколько различных режимов захвата. Каждый режим будет соответствовать немного отличающемуся желаемому положению конечного эффектора. Если вы хотите зажать объект между его пальцами, для этого потребуется другое расстояние, чем если бы вы хотели обхватить объект пальцами.
Если вы хотите зажать объект между его пальцами, для этого потребуется другое расстояние, чем если бы вы хотели обхватить объект пальцами.
При разработке кинематической модели всегда следует тщательно учитывать концевой зажим.
Шаг 4: Расчет параметров DH
Параметры Денавита-Хартенберга (DH) часто требуются для ввода модели робота в симулятор и начала выполнения любого анализа на ней.
Лучший способ визуализировать параметры DH — посмотреть видео, которое я уже включил выше.
Параметры DH разбивают каждое соединение робота на четыре параметра, каждый из которых берется относительно предыдущего соединения. Они рассчитываются относительно «общей нормы», описанной выше. Обратите внимание, что если предыдущая ось z пересекает текущую ось z, что часто бывает, общая нормаль имеет нулевую длину.
- d — расстояние между предыдущей осью x и текущей осью x, по предыдущей оси z.
- θ — угол вокруг оси z между предыдущей осью x и текущей осью x.
- a (или r) — длина общей нормали, которая представляет собой расстояние между предыдущей осью z и текущей осью z
- α — угол вокруг общей нормали между предыдущей осью z и текущей осью z.

Просмотрите все соединения на чертеже и запишите параметры DH для каждого соединения. Каждое соединение должно иметь одно значение, которое является переменной, представляющей приводимое в действие соединение.
Для получения более подробного объяснения и некоторых примеров я рекомендую этот раздаточный материал Питера Корка или эту главу из Введение в робототехнику.
Альтернативы параметрам DH
Подход DH является наиболее распространенным подходом к прямой кинематике, но он не идеален. Одним из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси Z. Существуют различные альтернативы, в том числе представления теории винтов, Hayati-Roberts и другие геометрические модели (см. эту статью для сравнения). Это могут (или не могут) быть лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
эту статью для сравнения). Это могут (или не могут) быть лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
Шаг 5. Объединение параметров в робота целиком
Последний шаг — объединение всех параметров DH в робота целиком. Есть два способа сделать это, сложный и простой:
Трудный путь: Создайте свой собственный решатель
«Чистый» метод использования параметров DH состоит в том, чтобы «свернуть свой собственный» решатель Forward Kinematic, используя ваш любимый язык программирования. Я сам использовал этот подход в прошлом, хотя, вероятно, в наши дни я бы не стал этого делать.
Когда у вас есть параметры DH для каждого соединения, вы можете использовать этот метод, чтобы закодировать его в решатель прямой кинематики:
- Найдите библиотеку на вашем языке программирования, которая позволяет выполнять матричное умножение. Кроме того, напишите свой собственный код, используя методы из этого списка.
- Для каждого соединения робота заполните новую матрицу 4 x 4 следующими значениями:

- Перемножьте все матрицы вместе, начиная с первого сустава и заканчивая концевым эффектором.
- Окончательный вектор T будет содержать положение концевого эффектора. Матрица R будет содержать ориентацию концевого эффектора.
Если вы просто хотите попробовать это с некоторыми значениями, не кодируя свой собственный решатель, вы можете использовать этот удобный онлайн-инструмент, чтобы создать рабочий пример полного робота из его параметров DH.
По моему опыту, создание собственного решателя дает не больше преимуществ, чем использование существующей библиотеки. Тем не менее, это хорошее упражнение для обучения.
Простой способ: используйте существующие библиотеки
Гораздо более эффективный способ расчета прямой кинематики, если у вас есть параметры DH, — использовать существующую библиотеку.
Существует множество кинематических программных библиотек, и многие из них делают гораздо больше, чем просто вычисляют прямую кинематику.