

Содержание
5.4. Устойчивость автомобиля
Под устойчивостью
понимают свойства автомобиля противостоять
заносу, скольжению, опрокидыванию.
Различают продольную и поперечную
устойчивость автомобиля. Более вероятна
и опасна потеря поперечной устойчивости.
Курсовой устойчивостью
автомобиля называют его свойство
двигаться в нужном направлении без
корректирующих воздействий со стороны
водителя, т.е. при неизменном положении
рулевого колеса. Автомобиль с плохой
курсовой устойчивостью все время
неожиданно меняет направление движения.
Это создает угрозу другим транспортным
средствам и пешеходам. Водитель, управляя
неустойчивым автомобилем, вынужден
особенно внимательно следить за
дорожной обстановкой и постоянно
корректировать движение, чтобы
предотвратить выезд за пределы дороги.
При длительном управлении таким
автомобилем водитель быстро утомляется,
повышается возможность ДТП.
Нарушение курсовой
устойчивости происходит в результате
действия возмущающих сил, например,
порывов бокового ветра, ударов колес о
неровности дороги, а также из–за резкого
поворота управляемых колес водителем.
Потеря устойчивости может быть вызвана
и техническими неисправностями
(неправильная регулировка тормозных
механизмов, излишний люфт в рулевом
управлении или его заклинивание, прокол
шины и др.)
Особенно опасна
потеря курсовой устойчивости при большой
скорости. Автомобиль, изменив направление
движения и отклонившись даже на
небольшой угол, может через короткое
время оказаться на полосе встречного
движения. Так, если автомобиль, движущийся
со скоростью 80 км/ч, отклонится от
прямолинейного направления движения
всего на 5°, то через 2,5с он переместиться
в сторону почти на I м и водитель может
не успеть вернуть автомобиль на прежнюю
полосу.
а) | б) |
в) | |
Рис. | |
 5.5.
5.5. Часто автомобиль
теряет устойчивость при движении по
дороге с поперечным уклоном (косогору)
и при повороте на горизонтальной
дороге. Если автомобиль движется по
косогору (рис.5.5,а) сила тяжести G
составляет с поверхностью дороги угол
и ее можно разложить на две составляющие:
силу Р1,
параллельную дороге, и силу Р2,
перпендикулярную ей. Сила Р1,
стремиться сдвинуть автомобиль под
уклон и опрокинуть его. Чем больше угол
косогора
,
тем больше сила Р1
, следовательно,
тем вероятнее потеря поперечной
устойчивости. При повороте автомобиля
причиной потери устойчивости является
центробежная сила Рц
(рис. 5.5,б), направленная от центра поворота
и приложенная к центру тяжести
автомобиля. Она прямо пропорциональна
квадрату скорости автомобиля и обратно
пропорциональна радиусу кривизны
его траектории.
Поперечному
скольжению шин по дороге противодействуют
силы сцепления, как уже отмечалось выше,
которые зависят от коэффициента
сцепления. На сухих, чистых покрытиях
На сухих, чистых покрытиях
силы сцепления достаточно велики, и
автомобиль не теряет устойчивости даже
при большой поперечной силе. Если дорога
покрыта слоем мокрой грязи или льда,
автомобиль может занести даже в том
случае, когда он движется с небольшой
скоростью по сравнительно пологой
кривой.
,
(5.5)
Максимальная
скорость, с которой можно двигаться по
криволинейному участку радиусом R
без поперечного скольжения шин, равна
Так, выполняя
поворот на сухом асфальтобетонном
покрытии (jx=0,7)
при R=50м, можно двигаться со скоростью
около 66 км/ч. Преодолевая тот же поворот
после дождя (jx=0,3)
без скольжения можно двигаться лишь
при скорости 40–43 км/ч. Поэтому перед
поворотом нужно уменьшить скорость тем
больше, чем меньше радиус предстоящего
поворота. Формула (5.5) определяет
скорость, при которой колеса обоих
мостов автомобиля скользят в поперечном
направлении одновременно. Такое явление
Такое явление
в практике наблюдается крайне редко.
Гораздо чаще начинают скользить шины
одного из мостов – переднего или заднего.
Поперечное скольжение переднего моста
возникает редко и к тому же быстро
прекращается. В большинстве скользят
колеса заднего моста, которые, начав
двигаться в поперечном направлении,
скользят все быстрее. Такое ускоряющееся
поперечное скольжение называют заносом.
Для гашения начавшегося заноса нужно
повернуть рулевое колесо в сторону
заноса. Автомобиль при этом начнет
двигаться по более пологой кривой,
радиус поворота увеличиться, а центробежная
сила уменьшится. Поворачивать рулевое
колесо нужно плавно и быстро, но не на
очень большой угол, чтобы не вызвать
поворот в противоположную сторону. Как
только занос прекратиться, нужно также
плавно и быстро вернуть рулевое колесо
в нейтральное положение. Следует также
заметить, что для выхода из заноса
заднеприводного автомобиля подачу
топлива нужно уменьшить, а на
переднеприводном, напротив, увеличить.
Часто занос
возникает во время экстренного торможения,
когда сцепление шин с дорогой уже
использовано для создания тормозных
сил. В этом случае следует немедленно
В этом случае следует немедленно
прекратить или ослабить торможение и
тем самым повысить поперечную устойчивость
автомобиля.
Под действием
поперечной силы автомобиль может не
только скользить по дороге, по и
опрокинуться на бок или на крышу.
Возможность опрокидывания зависит от
положения центра, тяжести автомобиля.
Чем выше от поверхности автомобиля
находится центр тяжести, тем вероятнее
опрокидывание. Особенно часто
опрокидываются автобусы, а также грузовые
автомобили, занятые на перевозке
легковесных, объемных грузов (сено,
солома, пустая тара и т.д.) и жидкостей.
Под действием поперечной силы рессоры
с одной стороны автомобиля сжимаются
и кузов его наклоняется, увеличивая
опасность опрокидывания.
Максимальная
скорость, с которой можно преодолевать
поворот без опрокидывания равна:
(5.6)
где n – коэффициент,
учитывающий поперечный наклон (крен)
кузова на подвеске; R – 0,9 для легковых
автомобилей и 0,8 для грузовых и автобусов;
В – колея автомобиля,
м;
h – высота центра
тяжести, м.
Если по формулам
(5.4) и (5.5 ) подсчитать скорости Vck
и Von
, то почти всегда окажется, что Vck<Vom
. Следовательно, при одной и той же
скорости поперечное скольжение шин и
занос наиболее вероятны, чем
опрокидывание. Однако это не совсем
верно, так как, определяя скорость Vck,
мы считали, что центробежной силе
противодействуют только силы сцепления,
удерживающие автомобиль. Но, возможно,
что поперечному скольжению автомобиля
помешает какое – либо препятствие
(неровность дороги, бордюрный камень
тротуара и т.д.). В этом случае автомобиль
может опрокинуться и без скольжения
шин.
Особенно опасным
является сочетание криволинейного
участка дороги с поперечным уклоном.
На (рис. 34.5,в) показаны два автомобиля,
движущихся по криволинейному участку:
автомобиль I – по внешнему краю дороги,
а автомобиль II – по внутреннему. Разложим
силу веса G и центробежную силу Р у
каждого автомобиля на два направления:
перпендикулярно к дорожному полотну
(силы Р2 и
Рц2)
и параллельное ему (Р, и Рц|).
У автомобиля II силы Р2
и Рц2
складываются, увеличивая силу сцепления
шин с дорогой. Силы же Р, и Рц1
действуют в противоположных направлениях
и частично уравновешивают одна другую.
У автомобиля I, напротив, сила Рц2,
действуя в направлении, противоположном
силе Р2
уменьшает силу сцепления шин с дорогой,
а силы Pj
и Р , складываются, увеличивая возможность
нарушения устойчивости автомобиля.
Таким образом, на дорогах с двускатной
проезжей частью, всегда более опасен
левый поворот автомобиля.
Для создания
необходимой безопасности движения на
дорогах с малым радиусом поворота
устраивают односкатный поперечный
профиль – вираж. На вираже проезжая
часть и обочины имеют поперечный наклон
к центру кривой. При наличии виража,
независимо от направления движения
автомобиля, составляющие сил Рц
и G направлены также, как у автомобиля
II, и обеспечивают сохранение поперечной
устойчивости. Поперечный уклон виража
увеличивают при уменьшении радиуса
поворота.
Устойчивость автомобиля — Автомобили (Инженерия)
План лекции
14.1. Показатели поперечной устойчивости
14.2. Поперечная устойчивость на вираже
14.3. Занос автомобиля
Устойчивость автомобиля является важнейшим эксплуатационным свойством, от которого во многом зависит безопасность движения. Нарушение устойчивости автомобиля приводит к снижению безопасности движения, вследствие чего может возникнуть аварийная ситуация или произойти дорожно-транспортное происшествие. Признаком потери автомобилем устойчивости является его скольжение или опрокидывание. В зависимости от направления скольжения или опрокидывания автомобиля устойчивость может быть продольной или поперечной. Нарушение у автомобиля поперечной устойчивости в процессе эксплуатации наиболее вероятно и более опасно, чем нарушение продольной устойчивости.
14.1. Показатели поперечной устойчивости
Показателями поперечной устойчивости автомобиля являются критическая скорость по боковому скольжению (заносу) v3, км/ч, критическая скорость по опрокидыванию v0, км/ч, критический угол поперечного уклона дороги (косогора) по боковому скольжению βз , °, критический угол поперечного уклона дороги (косогора) по опрокидыванию βо, °, коэффициент поперечной устойчивости ηп
Критическая скорость по боковому скольжению (заносу). Приравномерном движении автомобиля на повороте на горизонтальной дороге (рис. 14.1) боковое скольжение его колес может возникнуть в результате действия поперечной силы Ру(центробежной, силы ветра или боковых ударов о неровности дороги) в тот момент, когда поперечная сила становится равной силе сцепления колес с дорогой, т.е.
Приравномерном движении автомобиля на повороте на горизонтальной дороге (рис. 14.1) боковое скольжение его колес может возникнуть в результате действия поперечной силы Ру(центробежной, силы ветра или боковых ударов о неровности дороги) в тот момент, когда поперечная сила становится равной силе сцепления колес с дорогой, т.е.
Подставим в это выражение значения центробежной силы и силы сцепления:
Рекомендуемые материалы
где φy, — коэффициент поперечного сцепления.
Учитывая, что в этом случае v = v3, находим критическую скорость автомобиля по боковому скольжению, или заносу, км/ч:
Рис. 14.1. Схема для определения критических скоростей автомобиля по заносу и опрокидыванию:
А — точка, относительно которой происходит опрокидывание автомобиля
Критической скоростью по боковому скольжению называется предельная скорость, по достижении которой возможен занос автомобиля.
Таким образом, при прохождении поворота на критической скорости по боковому скольжению заноса у автомобиля может и не возникнуть. В этом случае занос может произойти только при любом минимальном боковом возмущении (порыв ветра, боковой удар колеса о дорожную неровность, поперечный уклон дороги), а также при увеличении скорости движения или уменьшении радиуса поворота, что приводит к увеличению поперечной силы Ру.
Зависимости v3 от радиуса поворота R и коэффициента φy показаны на рис. 14.2.
Критическая скорость по опрокидыванию. При повороте на горизонтальной дороге поперечная сила Ру(см. рис. 14.1), действующая на автомобиль, может вызвать не только боковое скольжение, но и опрокидывание. Опрокидывание автомобиля происходит относительно его наружных колес (точка А). В момент отрыва внутренних колес от дороги нормальные реакции RZb= О, и весь вес автомобиля воспринимается наружными колесами (RZh = G). В этом случае опрокидывающий момент, создаваемый поперечной силой, уравновешивается восстанавливающим моментом, обусловленным весом автомобиля:
В этом случае опрокидывающий момент, создаваемый поперечной силой, уравновешивается восстанавливающим моментом, обусловленным весом автомобиля:
Рис. 14.2. Зависимости критической скорости автомобиля по заносу от радиуса поворота и коэффициента сцепления
Подставив в это выражение значения моментов, получим
или с учетом значения поперечной силы
Помня о том, что в этом случае v = v0, определим критическую скорость автомобиля по опрокидыванию, км/ч:
Критической скоростью по опрокидыванию называется предельная скорость, по достижении которой возможно опрокидывание автомобиля.
Следовательно, при движении автомобиля на повороте с критической скоростью по опрокидыванию его опрокидывания может и не произойти. Опрокидывание автомобиля в этом случае возможно только при минимальном боковом возмущении и увеличении скорости или уменьшении радиуса поворота. Зависимости v0 от R и hц показаны на рис. 14.3.
14.3.
Критический угол поперечного уклона дороги по боковому скольжению. При прямолинейном движении автомобиля по дороге с поперечным уклоном (по косогору) потерю его поперечной устойчивости вызывает составляющая силы тяжести автомобиля (рис. 14.4), параллельная плоскости косогора:
где (3 — угол поперечного уклона дороги.
Боковое скольжение автомобиля на косогоре может начаться в момент, когда
Рис. 14.3. Зависимости критической скорости по опрокидыванию от радиуса поворота и высоты центра тяжести автомобилей, имеющих одинаковую колею:
hц1,, hц2,— значения высоты центра тяжести двух автомобилей
Рис. 14.4. Схема для определения критических углов поперечного уклона дороги по боковому скольжению и опрокидыванию
Рис. 14.5. Зависимость критического угла поперечного уклона дороги по боковому скольжению от коэффициента сцепления
Подставив в последнеевыражение значения сил, получим
Учитывая, что в данном случае р = рз, определим критический угол поперечного уклона дороги по боковому скольжению:
Критическим углом поперечного уклона дороги по боковому скольжению называется предельный угол, при котором еще возможно прямолинейное движение автомобиля по косогору без бокового скольжения колес. Боковое скольжение автомобиля в этих условиях начинается при действии любого минимального поперечного возмущения.
Боковое скольжение автомобиля в этих условиях начинается при действии любого минимального поперечного возмущения.
Угол βз линейно зависит от коэффициента φy (рис. 14.5).
Критический угол поперечного уклона дороги по опрокидыванию. При прямолинейном движении по дороге с поперечным уклоном (см. рис. 14.4) опрокидывание автомобиля может начаться в том случае, когда опрокидывающий момент, создаваемый поперечной силой, уравновешен восстанавливающим моментом, обусловленным нормальной составляющей силы тяжести автомобиля:
Подставим в это выражение значения моментов:
Учитывая, что в данном случае р = р0, находим критический угол поперечного уклона дороги по опрокидыванию:
Рис. 14.6. Зависимость критического угла поперечного уклона дороги по опрокидыванию от соотношения колеи колес и высоты центра тяжести автомобиля
Критическим утлом поперечного уклона дороги по опрокидыванию называется предельный угол, при котором еще возможно прямолинейное движение автомобиля по косогору без опрокидывания.
Опрокидывание автомобиля в этом случае может произойти только при любом минимальном боковом возмущении.
Значение критического угла поперечного уклона дороги по опрокидыванию зависит от типа автомобиля. Так, для легковых автомобилей этот угол составляет 40…50°, для грузовых автомобилей — 30 …40° и для автобусов — 25… 35°. Угол ро линейно зависит
от отношения(рис. 14.6).
Коэффициент поперечной устойчивости. Коэффициентом поперечной устойчивости автомобиля называется отношение колеи колес автомобиля к его удвоенной высоте центра тяжести:
Коэффициент поперечной устойчивости позволяет определить, какой из двух видов потерь поперечной устойчивости (занос или опрокидывание) более вероятен при эксплуатации.
Для примера рассмотрим случай движения автомобиля при повороте на горизонтальной дороге. С этой целью приравняем критические скорости по боковому скольжению и опрокидыванию:
откуда
Из этого выражения следует, что если коэффициент поперечного сцепления колес с дорогой меньше коэффициента поперечной устойчивости (φy, < ηп), то при повороте более вероятен занос, чем опрокидывание. Если же коэффициент поперечного сцепления колес с дорогой больше коэффициента поперечной устойчивости (φy > ηп ), то опрокидывание автомобиля может произойти без предварительного его заноса, что возможно на дорогах с большим коэффициентом сцепления.
Если же коэффициент поперечного сцепления колес с дорогой больше коэффициента поперечной устойчивости (φy > ηп ), то опрокидывание автомобиля может произойти без предварительного его заноса, что возможно на дорогах с большим коэффициентом сцепления.
Значение коэффициента поперечной устойчивости зависит от типа автомобиля. Так, для грузовых автомобилей оно составляет 0,55…0,8, для автобусов — 0,5…0,6 и легковых автомобилей — 0,8… 1,2. Чем больше значение коэффициента поперечной устойчивости, тем более устойчив автомобиль против бокового опрокидывания.
14.2. Поперечная устойчивость на вираже
Ранее были рассмотрены случаи, когда нарушение поперечной устойчивости автомобиля вызывали закругления или поперечный уклон дороги. Однако в эксплуатации часто встречаются одновременно поворот и поперечный уклон дороги, что создает предпосылки для нарушения поперечной устойчивости.
На рис. 14.7 представлены два автомобиля. Автомобиль I движется на повороте по наружному краю дороги, а автомобиль II — по внутреннему.
Определим, какой из них более устойчив и безопасен на повороте. Для этого разложим поперечную силу Руи силу тяжести G на соответствующие составляющие, перпендикулярные (Р’уи G‘) и параллельные (Р»уи G«) поверхности дороги.
У автомобиля II поперечная устойчивость выше, чем у автомобиля I, так как у него силы Ру‘ и G‘ складываются и увеличивают
Рис. 14.7. Движение автомобилей на повороте:
G‘, G» — составляющие силы тяжести автомобиля на повороте; Р’у, Р»у— составляющие поперечной силы
сцепление колес с дорогой, а силы Ру‘и G «частично уравновешивают друг друга, действуя в противоположные стороны.
У автомобиля I силы Ру‘ и G‘, направленные в противоположные стороны, уменьшают сцепление колес с дорогой, а силы Р’у‘ и G«, действуя в одном направлении, уменьшают поперечную устойчивость. Таким образом, автомобиль II, движущийся по внутреннему краю дороги (по отношению к центру поворота), более устойчив и безопасен на повороте, чем автомобиль I.
Таким образом, автомобиль II, движущийся по внутреннему краю дороги (по отношению к центру поворота), более устойчив и безопасен на повороте, чем автомобиль I.
В связи с этим для обеспечения необходимой безопасности движения на дорогах с малым радиусом поворота устраивают вираж — односкатный поперечный профиль, благодаря которому поперечный уклон дороги направлен к центру поворота. В этом случае поперечная устойчивость автомобиля существенно повышается (как у автомобиля II) независимо от направления его движения.
При движении на вираже (рис. 14.8) боковое скольжение автомобиля может начаться при условии
где Рб— боковая сила, действующая на вираже, или
Рис. 14.8. Движение автомобиля на вираже
Подставим в указанное выражение значение поперечной составляющей Руцентробежной силы и, выполнив ряд преобразований, определим критическую скорость автомобиля по заносу на вираже, км/ч:
Зависимости v3B от R и φy, аналогичны приведенным на рис. 14.2. Опрокидывание автомобиля при движении на вираже возможно при условии равенства опрокидывающего и восстанавливающего моментов:
14.2. Опрокидывание автомобиля при движении на вираже возможно при условии равенства опрокидывающего и восстанавливающего моментов:
или
Подставим значение силы Ру и, выполнив соответствующие
преобразования, найдем критическую скорость автомобиля по опрокидыванию на вираже, км/ч:
Зависимости vOB от радиуса R и высоты Лц аналогичны представленным на рис. 14.3.
В приведенных ранее формулах для показателей поперечной устойчивости автомобиля не учитываются эластичность его шин и подвески и, следовательно, поперечный крен кузова. В процессе эксплуатации при действии боковой силы возникает поперечный крен кузова. Угол крена кузова не превышает 8… 10°, но он существенно ухудшает поперечную устойчивость автомобиля, что способствует его опрокидыванию. Так, например, значения критической скорости и критического угла поперечного уклона дороги по опрокидыванию с учетом бокового крена кузова на 10. .. 14 % меньше, чем без учета крена.
.. 14 % меньше, чем без учета крена.
14.3. Занос автомобиля
В процессе эксплуатации автомобилей при нарушении поперечной устойчивости чаще происходит их занос, чем опрокидывание. При этом начинают скользить колеса одного из мостов — переднего или заднего.
Определим, что более вероятно и опасно: занос переднего управляемого или заднего ведущего моста.
Для качения колеса без скольжения необходимо, чтобы
где Rx — касательная реакция дороги; Ry — поперечная реакция дороги.
Следовательно, должно выполняться соотношение
согласно которому поперечная сила, прилагаемая к колесу и не вызывающая его скольжения, тем больше, чем значительнее сила сцепления колеса с дорогой и меньше касательная реакция дороги.
Определим, какое из колес (ведомое, ведущее или тормозящее) наиболее устойчиво против бокового скольжения (заноса).
Ведомое колесо наиболее устойчиво против заноса, так как касательная реакция дороги Rx, представляющая собой силу сопротивления качению, мала по сравнению с силой сцепления Рсц.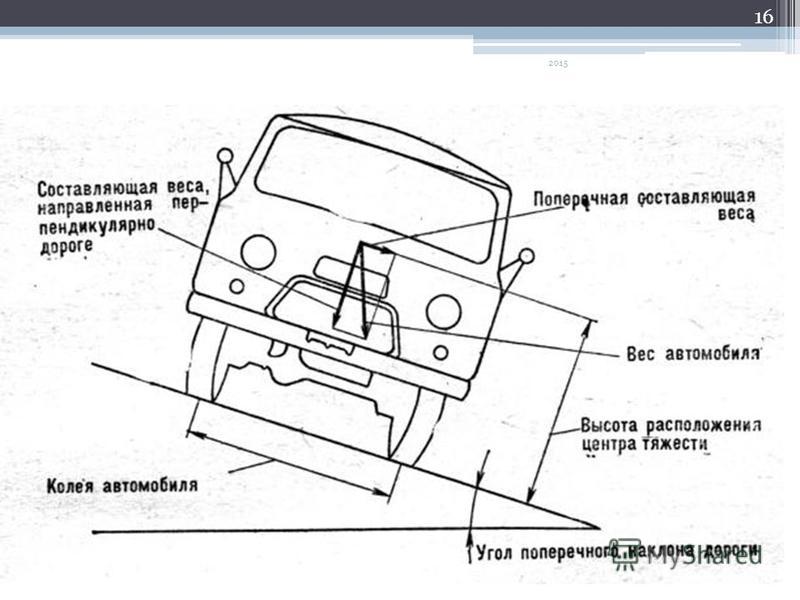
Ведущее и тормозящее колеса менее устойчивы против заноса, поскольку через них передаются соответственно тяговая и тормозная силы. В тот момент, когда сила сцепления будет равна касательной реакции дороги (Рсц = Rx), сцепление колеса с дорогой полностью использовано касательной реакцией. В этом случае достаточно действия небольшой боковой силы, чтобы начался занос колеса. Для ликвидации начавшегося заноса следует уменьшить касательную реакцию на колесе (уменьшить тяговую силу, прекратить торможение).
При прямолинейном движении автомобиля наиболее вероятен занос заднего ведущего моста, так как на его колеса при разгоне и преодолении повышенного сопротивления дороги действуют касательные реакции дороги во много раз более значительные, чем на колеса переднего ведомого моста. При торможении автомобиля вследствие перераспределения нагрузки (увеличивается нагрузка на передний мост) уменьшается сила сцепления задних колес, что также способствует заносу заднего ведущего моста.
Занос заднего ведущего моста автомобиля при эксплуатации не только вероятнее, чем переднего, но и опаснее. Допустим, что у двигавшегося прямолинейно автомобиля со скоростью va начался занос или переднего (рис. 14.9, а), или заднего (рис. 14.9, б) моста со скоростью v‘3. В обоих случаях мост, у которого начался занос, перемещается в направлении результирующей скорости v‘, а нескользящий мост по-прежнему движется прямолинейно со скоростью vа,. Происходит поворот автомобиля вокруг центра О, и на автомобиль действует центробежная сила Рц. Радиус поворота автомобиля в этом случае равен R.
Рис. 14.9. Занос переднего (а) и заднего (б) мостов автомобиля: О — центр поворота
Рис. 14.10. Гашение заноса автомобиля:
О, О1— центры поворота; R, R1, — радиусы поворота при заносе и ликвидации заноса
Бесплатная лекция: «1 Человек как общественное явление» также доступна.
При заносе переднего моста (см. рис. 14.9, а) поперечная составляющая Руцентробежной силы, являющаяся основной силой, которая действует на автомобиль при повороте, направлена противоположно скольжению передних колес. В результате занос переднего моста автоматически прекращается.
При заносе заднего моста (см. рис. 14.9, б) поперечная составляющая Руцентробежной силы действует в направлении скольжения задних колес и усиливает начавшийся занос заднего моста. Для ликвидации начавшегося заноса необходимо повернуть передние управляемые колеса в сторону заноса, как показано на рис. 14.10. При этом центр поворота автомобиля О переместится в точку О1, радиус поворота увеличится и станет равным Rx. В результате поперечная составляющая Руцентробежной силы, способствующая заносу, уменьшится.
При повороте передних колес на больший угол центр поворота переместится на противоположную сторону автомобиля, и поперечная составляющая Руцентробежной силы будет направлена в сторону, противоположную заносу. Занос задних колес в этом случае прекратится.
Занос задних колес в этом случае прекратится.
При еще большем угле поворота передних колес скольжение задних колес начнется в противоположную сторону. Поэтому после прекращения заноса задних колес автомобиль нужно вывести на прямолинейное движение.
В процессе эксплуатации занос автомобиля происходит чаще всего при торможении, когда в месте контакта колес с дорогой действуют большие тормозные силы. В результате колеса теряют способность воспринимать боковые силы. При торможении занос часто возникает также из-за неодинаковых тормозных моментов на колесах одного моста. Это происходит вследствие неправильной регулировки тормозных механизмов или их замасливания и загрязнения.
Для ликвидации начавшегося заноса при торможении следует уменьшить касательные реакции дороги на колесах (прекратить торможение). Для устранения потери устойчивости автомобиля необходимо перед началом поворота уменьшить скорость движения, так как поперечная составляющая Руцентробежной силы пропорциональна квадрату скорости.
Объяснение систем контроля устойчивости — Drivingfast.net
Электронные системы контроля устойчивости (SC для целей этой статьи) обнаруживают потерю сцепления с дорогой и реагируют на восстановление сцепления с помощью систем торможения и управления двигателем. Ситуации, в которых системы вступают в действие, включают недостаточную поворачиваемость, избыточную поворачиваемость и пробуксовку колес.
Большинство новых автомобилей в настоящее время оснащены той или иной системой контроля устойчивости. Для этой технологии существует множество сокращений, которые различаются в зависимости от производителя автомобиля…
- Электронная система контроля тяги (ETC/TCS)
- Система динамической стабилизации (DSC)
- Электронная система стабилизации (ESP)
- Система стабилизации Porsche (PSM)
- И т. д.
эти системы уникальны – все они функционируют очень похожим образом (и, как правило, производятся одним и тем же производителем).
Как работают системы контроля устойчивости?
Датчики Чтобы автомобиль обнаруживал потерю сцепления с дорогой, ему нужны датчики. Они бывают разных форм и определяют поведение автомобиля и действия водителя. Датчики рыскания, гироскопы, датчики скорости вращения колес и акселерометры являются наиболее распространенными датчиками в системах SC. Кроме того, информация, начиная от положения руля и педали, оборотов двигателя и выбора передачи, используется для определения действий водителя.
Как используется эта информация?
Когда система SC определяет, что происходит потеря сцепления с дорогой, она действует, используя органы управления торможением и двигателем (а в некоторых автомобилях даже систему рулевого управления), чтобы вернуть автомобиль в нужное русло. Система реагирует по набору заданных критериев в зависимости от характера потери тяги, которая может включать пробуксовку колес или скольжение.
Вращающиеся колеса
Противобуксовочная система используется для снижения потерь привода из-за вращающихся колес. Это может произойти при движении по скользкой поверхности или при резком ускорении (обычно на первой передаче с места). Противобуксовочная система реагирует, подтормаживая пробуксовывающее колесо, и это заставляет привод переключаться на колесо (колеса) с лучшим сцеплением с дорогой. Контроль тяги обычно работает только ниже определенной скорости.
Это может произойти при движении по скользкой поверхности или при резком ускорении (обычно на первой передаче с места). Противобуксовочная система реагирует, подтормаживая пробуксовывающее колесо, и это заставляет привод переключаться на колесо (колеса) с лучшим сцеплением с дорогой. Контроль тяги обычно работает только ниже определенной скорости.
Скольжение
Существует два разных типа скольжения – недостаточная и избыточная поворачиваемость. Системы SC реагируют на такие ситуации, подтормаживая отдельные колеса и уменьшая крутящий момент двигателя, когда это необходимо, чтобы удерживать автомобиль на линии. В ситуации недостаточной поворачиваемости крутящий момент снижается, и в результате переноса веса вперед обычно достаточно для восстановления контроля. Если этого недостаточно, чтобы вернуть автомобиль в исходное положение, будут задействованы отдельные задние тормоза. Когда возникает избыточная поворачиваемость, тормозное усилие прикладывается к одному из передних колес, которое действует как стержень, возвращая автомобиль в исходное положение. Как правило, тормоза применяются только к тем колесам, которые имеют наибольшее сцепление с дорогой.
Как правило, тормоза применяются только к тем колесам, которые имеют наибольшее сцепление с дорогой.
как система тормозит?
В настоящее время ABS входит в стандартную комплектацию практически каждого автомобиля. Эта спасательная система позволяет вам продолжать управлять автомобилем во время торможения, регулируя тормозное давление и предотвращая блокировку колес. Система использует гидравлический двигатель для создания тормозного давления, и этот же двигатель используется системами SC для приложения тормозного усилия к отдельным колесам, где это возможно, а клапаны в блоке ABS регулируют давление.
Недостатки систем контроля устойчивости
Как обсуждалось выше, системы SC используют как тормоза, так и органы управления двигателем, чтобы уменьшить пробуксовку или скольжение колес. Великолепно на дороге, но когда вы на трассе, последнее, что вам нужно, это тормозить машину! У большинства высокопроизводительных автомобилей есть возможность отключить (или значительно уменьшить) системы SC с помощью кнопки на приборной панели. Поэкспериментируйте, отключив управление, и посмотрите, как ведет себя машина. Если у вас есть плохая привычка позволять системам SC сортировать вас на поворотах, вы можете обнаружить, что начинаете крутиться на первом повороте, поэтому будьте осторожны и постепенно наращивайте скорость по мере того, как ваша уверенность повышается.
Поэкспериментируйте, отключив управление, и посмотрите, как ведет себя машина. Если у вас есть плохая привычка позволять системам SC сортировать вас на поворотах, вы можете обнаружить, что начинаете крутиться на первом повороте, поэтому будьте осторожны и постепенно наращивайте скорость по мере того, как ваша уверенность повышается.
ESP: Электронная программа курсовой устойчивости
Если на вашем автомобиле установлена ESP®, она предоставляет вам две другие активные системы безопасности: антиблокировочную тормозную систему ABS и противобуксовочную систему TCS. ABS предотвращает блокировку колес при торможении; TCS предотвращает пробуксовку колес при трогании с места и ускорении. В то время как ABS и TCS воздействуют на продольную динамику автомобиля, ESP® дополнительно улучшает поперечную динамику, обеспечивая тем самым стабильное движение во всех направлениях.
ESP® – разные названия для одного и того же преимущества безопасности 80 процентов производителей автомобилей в Европе используют аббревиатуру ESP® для электронной программы стабилизации. Некоторые автопроизводители продают ESP® под разными названиями, например, DSC (Dynamic Stability Control), VSA (Vehicle Stability Assist) или VSC (Vehicle Stability Control). Функциональность и работа системы ESP®, а также повышение безопасности вождения, которое она обеспечивает, остались прежними.
Некоторые автопроизводители продают ESP® под разными названиями, например, DSC (Dynamic Stability Control), VSA (Vehicle Stability Assist) или VSC (Vehicle Stability Control). Функциональность и работа системы ESP®, а также повышение безопасности вождения, которое она обеспечивает, остались прежними.
Как работает ESP®?
Занос – одна из основных причин дорожно-транспортных происшествий. Международные исследования показывают, что не менее 40 процентов всех дорожно-транспортных происшествий со смертельным исходом вызваны заносом. ESP® может предотвратить до 80 процентов всех аварий с заносом. ESP® распознает опасность заноса и очень быстро вмешивается. Водитель сохраняет контроль над транспортным средством и не попадает в занос при условии, что физические ограничения не превышены.
ESP® всегда активна. Микрокомпьютер отслеживает сигналы датчиков ESP® и проверяет 25 раз в секунду, соответствуют ли действия водителя рулевому управлению фактическому направлению движения автомобиля. Если автомобиль движется в другом направлении, ESP® распознает критическую ситуацию и немедленно реагирует – независимо от водителя. Он использует тормозную систему автомобиля, чтобы «направить» автомобиль обратно в нужное русло. Благодаря этим избирательным вмешательствам в торможение ESP® создает необходимую противодействующую силу, так что автомобиль реагирует так, как задумал водитель. ESP® не только инициирует торможение, но также может вмешиваться со стороны двигателя для ускорения ведущих колес. Итак, в рамках физики автомобиль благополучно держится на нужной трассе.
Если автомобиль движется в другом направлении, ESP® распознает критическую ситуацию и немедленно реагирует – независимо от водителя. Он использует тормозную систему автомобиля, чтобы «направить» автомобиль обратно в нужное русло. Благодаря этим избирательным вмешательствам в торможение ESP® создает необходимую противодействующую силу, так что автомобиль реагирует так, как задумал водитель. ESP® не только инициирует торможение, но также может вмешиваться со стороны двигателя для ускорения ведущих колес. Итак, в рамках физики автомобиль благополучно держится на нужной трассе.
Системы ABS, TCS и ESP® были впервые представлены на рынке компанией Bosch.
Пример:
Технические характеристики
Компоненты электронной программы стабилизации ESP® от Bosch
- ESP-гидравлический блок со встроенным блоком управления двигателем (ECU)
- Датчики скорости вращения колес
- Датчик угла поворота рулевого колеса
- Датчик рысканья и поперечного ускорения
- Связь с ЭБУ 9 управления двигателем0008
Гидравлический блок с присоединенным блоком управления
Гидравлический блок выполняет команды блока управления и регулирует с помощью электромагнитных клапанов давление в колесных тормозах. Гидравлический модулятор представляет собой гидравлическое соединение между главным цилиндром и колесными цилиндрами. Он расположен в моторном отсеке. Блок управления берет на себя электрические и электронные задачи, а также все функции управления системой.
Гидравлический модулятор представляет собой гидравлическое соединение между главным цилиндром и колесными цилиндрами. Он расположен в моторном отсеке. Блок управления берет на себя электрические и электронные задачи, а также все функции управления системой.
Датчик скорости вращения колеса
Блок управления использует сигналы датчиков скорости вращения колес для расчета скорости вращения колес. Используются два разных принципа работы: пассивные и активные датчики скорости вращения колес (индуктивные датчики и датчики Холла). Оба измеряют скорость вращения колеса бесконтактным способом с помощью магнитных полей. В настоящее время в основном используются активные датчики. Они могут определять как направление вращения, так и остановку колеса.
Датчик угла поворота рулевого колеса
Датчик угла поворота рулевого колеса измеряет положение рулевого колеса путем определения угла поворота рулевого колеса. Исходя из угла поворота рулевого колеса, скорости автомобиля и требуемого тормозного давления или положения педали акселератора, рассчитывается намерение водителя управлять автомобилем (желаемое состояние).
Датчик рыскания и поперечного ускорения
Датчик рысканья регистрирует все движения автомобиля вокруг его вертикальной оси. В сочетании со встроенным датчиком поперечного ускорения состояние автомобиля (фактическое состояние) можно определить и сравнить с намерением водителя.
Связь с блоком управления двигателем
Через шину данных блок управления ESP может обмениваться данными с блоком управления двигателем. Таким образом, крутящий момент двигателя может быть снижен, если водитель в определенных дорожных ситуациях слишком сильно ускоряется. Точно так же он может компенсировать чрезмерную пробуксовку ведущих колес, вызванную тормозным моментом двигателя.
Тест Euro NCAP с ESP и без него
Дополнительные функции ESP®
Основная задача ESP® — предотвратить занос. Однако возможности, предлагаемые ESP®, выходят за рамки этого. Поскольку ESP® может создавать тормозное давление независимо от положения педали тормоза, с помощью ESP® можно реализовать ряд так называемых дополнительных функций. Они обеспечивают дополнительную безопасность вождения и позволяют водителю испытать повышенный комфорт вождения и маневренность.
Ряд этих дополнительных функций уже доступен на рынке сегодня. Другие последуют за ними, чтобы удовлетворить растущий спрос на безопасность и комфорт. В зависимости от производителя и типа автомобиля дополнительные функции ESP® доступны либо в качестве опции, либо в качестве стандартных функций уже установленной системы ESP.
Система удержания на подъеме
Старт на подъеме не всегда прост, особенно когда автомобиль сильно загружен. Водитель должен очень быстро нажимать на педали тормоза, акселератора и сцепления, чтобы автомобиль не откатился назад. Система ESP® Hill Hold Control облегчает трогание с места, удерживая тормоза еще примерно две секунды после того, как водитель уже отпустил педаль тормоза. У водителя достаточно времени для переключения с педали тормоза на педаль акселератора без использования ручного тормоза. Автомобиль трогается с места с комфортом и без скатывания назад.
Водитель должен очень быстро нажимать на педали тормоза, акселератора и сцепления, чтобы автомобиль не откатился назад. Система ESP® Hill Hold Control облегчает трогание с места, удерживая тормоза еще примерно две секунды после того, как водитель уже отпустил педаль тормоза. У водителя достаточно времени для переключения с педали тормоза на педаль акселератора без использования ручного тормоза. Автомобиль трогается с места с комфортом и без скатывания назад.
Гидравлический усилитель торможения
В критических дорожных ситуациях водители часто тормозят слишком нерешительно. Гидравлический усилитель торможения определяет неизбежную ситуацию экстренного торможения, отслеживая давление на педаль тормоза, а также градиент давления. Если водитель тормозит недостаточно сильно, гидравлический усилитель торможения увеличивает тормозное усилие до максимума. Затем тормозной путь сокращается.
Адаптивное управление нагрузкой
Объем и положение груза в коммерческом автомобиле могут значительно меняться от поездки к поездке. Нагрузка оказывает важное влияние на торможение, тягу, способность проходить повороты и склонность к переворачиванию. Система ESP® Load Adaptive Control определяет изменения массы автомобиля и центра тяжести вдоль продольной оси автомобиля и адаптирует действия систем безопасности ABS, TCS и ESP® к нагрузке автомобиля. Таким образом, Load Adaptive Control оптимизирует эффективность торможения, тягу и устойчивость. Кроме того, он снижает риск опрокидывания за счет улучшенного использования системы предотвращения опрокидывания и минимизирует износ тормозных колодок за счет оптимизации распределения тормозных усилий.
Нагрузка оказывает важное влияние на торможение, тягу, способность проходить повороты и склонность к переворачиванию. Система ESP® Load Adaptive Control определяет изменения массы автомобиля и центра тяжести вдоль продольной оси автомобиля и адаптирует действия систем безопасности ABS, TCS и ESP® к нагрузке автомобиля. Таким образом, Load Adaptive Control оптимизирует эффективность торможения, тягу и устойчивость. Кроме того, он снижает риск опрокидывания за счет улучшенного использования системы предотвращения опрокидывания и минимизирует износ тормозных колодок за счет оптимизации распределения тормозных усилий.
Защита от опрокидывания
Из-за нагрузки и более высокого центра тяжести легких коммерческих автомобилей они достигают критического поперечного ускорения быстрее, чем легковые автомобили. Таким образом, риск опрокидывания значительно выше. Функция предотвращения опрокидывания постоянно отслеживает поведение автомобиля с помощью датчиков ESP® и вмешивается, когда автомобиль угрожает перевернуться. Система предотвращения опрокидывания подтормаживает отдельные колеса и снижает крутящий момент, чтобы предотвратить опрокидывание и стабилизировать автомобиль.
Система предотвращения опрокидывания подтормаживает отдельные колеса и снижает крутящий момент, чтобы предотвратить опрокидывание и стабилизировать автомобиль.
Система контроля давления в шинах
Падение давления в шинах приводит к отклонению скорости вращения соответствующего колеса. Путем сравнения скоростей вращения колес определяется потенциальное сдувание шины. Эта дополнительная функция позволяет контролировать давление в шинах без использования датчиков давления в шинах.
Предотвращение раскачивания прицепа
Прицепы легко раскачиваются. Незначительная ошибка рулевого управления, порыв ветра или неровность дорожного покрытия могут вызвать критическое усиление раскачивания. Встречный поворот и ускорение тягача усугубляют критическую ситуацию. С помощью датчиков ESP® Trailer Sway Mitigation определяет эти раскачивающие движения прицепа и вмешивается, подтормаживая отдельные колеса тягача. Автомобиль и прицеп замедляются до некритической скорости и стабилизируются.
