Содержание
6 способов регулировки скорости электродвигателя
Главная
/
Справочник
/
6 способов регулировки скорости двигателя
Любой преобразователь частоты имеет несколько каналов управления частотой выходного напряжения и, соответственно, скоростью вращения электродвигателя. Рассмотрим основные каналы на примере преобразователя VT Drive Fit.
Итак, скорость двигателя можно регулировать следующими способами.
1. Настройка параметра F0-08 в меню устройства. Заданное значение частоты программируется и запоминается. В процессе работы частоту можно оперативно менять при помощи клавиш «Вверх» и «Вниз». Этот канал управления выбирается установкой функции F0-03 = 0. Измененное значение частоты после выключения питания не сохраняется и при повторном включении вновь возвращается к значению, установленному в F0-08. Задать запоминание измененной в процессе работы частоты можно установкой параметра F0-03 = 1.
В процессе работы частоту можно оперативно менять при помощи клавиш «Вверх» и «Вниз». Этот канал управления выбирается установкой функции F0-03 = 0. Измененное значение частоты после выключения питания не сохраняется и при повторном включении вновь возвращается к значению, установленному в F0-08. Задать запоминание измененной в процессе работы частоты можно установкой параметра F0-03 = 1.
2. Использование аналоговых входов Ai1, Ai2, Ai3. Все три входа могут быть входами по напряжению, с диапазоном от 0 до 10 В. Вход Ai2 может использоваться как токовый — на плате имеется специальный джампер для переключения. Если необходимо наличие входа Ai3 (диапазон напряжения – от -10 до +10 В), применяется дополнительная плата расширения, которая заказывается отдельно. Для выбора этих каналов нужно задать F0-03 = 2, 3, 4.
3. Использование импульсного высокочастотного входа Di5. На этот вход могут быть поданы импульсы с напряжением от 9 до 30 В и частотой до 100 кГц. Соответствие между частотой на входе Di5 и выходной частотой преобразователя частоты VT Drive Fit определяется в параметрах F4-28…F4-31. Импульсы для работы на этом канале могут быть получены с вращающегося энкодера, с индуктивного или оптического датчика, а также с дискретного выхода другого ПЧ или контроллера. Для выбора данного канала устанавливается F0-03 = 5.
Соответствие между частотой на входе Di5 и выходной частотой преобразователя частоты VT Drive Fit определяется в параметрах F4-28…F4-31. Импульсы для работы на этом канале могут быть получены с вращающегося энкодера, с индуктивного или оптического датчика, а также с дискретного выхода другого ПЧ или контроллера. Для выбора данного канала устанавливается F0-03 = 5.
4. Если в работе требуется несколько значений частоты, их можно предварительно задать, используя многоскоростной (многоступенчатый) режим. Для этого необходимо установить F0-03 = 6. Код выбора частоты задается подачей сигналов на четыре дискретных входа Di.
5. Использование датчика ПИД-регулятора. Датчиком может быть любой преобразователь давления, температуры, напряжения в сигнал напряжения или тока. При этом реализуется обратная связь, позволяющая регулировать и поддерживать постоянными различные параметры технологических процессов. Для выбора этого канала устанавливается F0-03 = 8.
6. Выходную частоту можно менять путем подачи сигналов Up / Down на соответствующие дискретные входы. Для этого нужно функцию (F00…F4-10) этих входов установить на значения 6 и 7.
В общем случае можно выбрать 3 источника частоты, каждый из которых имеет каналы управления, перечисленные выше.
- Главный источник частоты Х. Выбор канала производится в параметре Х0-03.
- Вспомогательный источник частоты Y. Выбор канала производится в параметре Х0-04.
- Сочетание (суперпозиция) главного и вспомогательного источников, X и Y.
Примеры установки канала управления скоростью приведены для главного источника частоты Х. Для вспомогательного канала Y параметры задаются аналогичным образом. Максимальная выходная частота, независимо от канала и источника, ограничена параметром, заданным в параметре F0-10 (50…320 Гц).
Возможность регулировки частоты при помощи переменного резистора (потенциометра) отсутствует. Плавная регулировка возможна только путем применения внешнего потенциометра, подключенного на аналоговый вход Ai1…Ai3.
Плавная регулировка возможна только путем применения внешнего потенциометра, подключенного на аналоговый вход Ai1…Ai3.
Другие полезные материалы:
Преимущества векторного управления асинхронным двигателем
Настройка ПЧ для работы на несколько двигателей
Тонкости настройки преобразователя частоты
Подпишитесь на рассылку!
Никакого спама! Только полезная справочная информация.
Я согласен на обработку персональных данных
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 7 из 39
Регулирование скорости вращения асинхронных двигателей производят несколькими способами.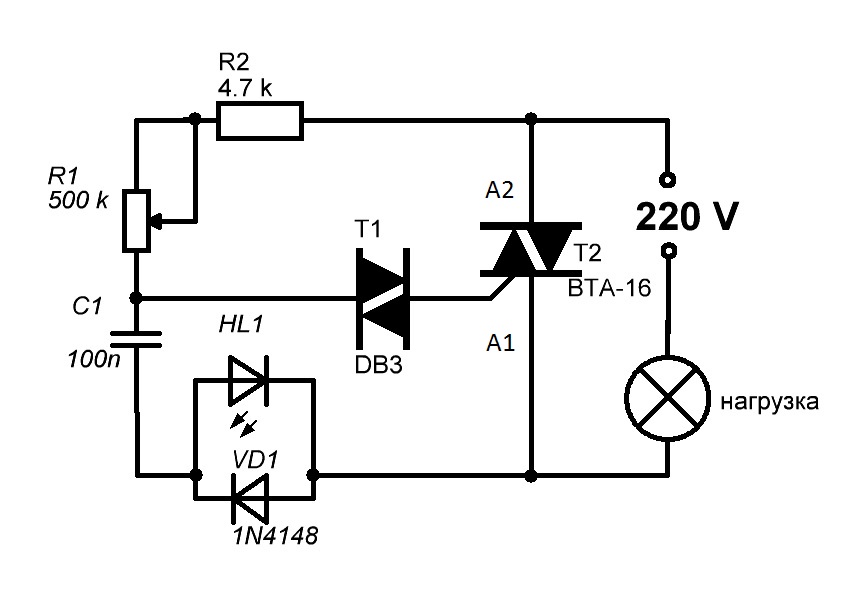 Формула скорости вращения асинхронных двигателей:
Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см.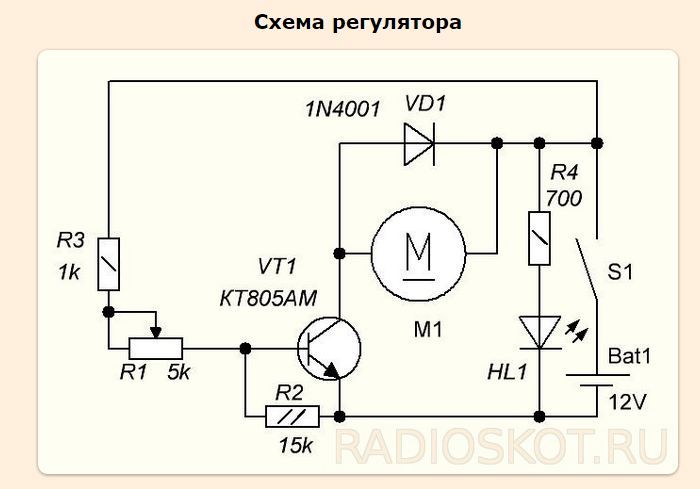 рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.
Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики
Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
Рис. 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Книги
- Учеба
 org/ListItem»> Вопросы и ответы по аккумуляторным батареям
org/ListItem»> Вопросы и ответы по аккумуляторным батареям
Еще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Как контролировать скорость электродвигателя переменного тока
27.11.2019
Несколько вариантов управления электродвигателями переменного тока
Двигатель переменного тока представляет собой электродвигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и внутреннего ротора, прикрепленного к выходному валу, создающего второе вращающееся магнитное поле. Возможность управления скоростью двигателя имеет множество преимуществ, и в этом руководстве рассматриваются различные способы управления скоростью двигателя.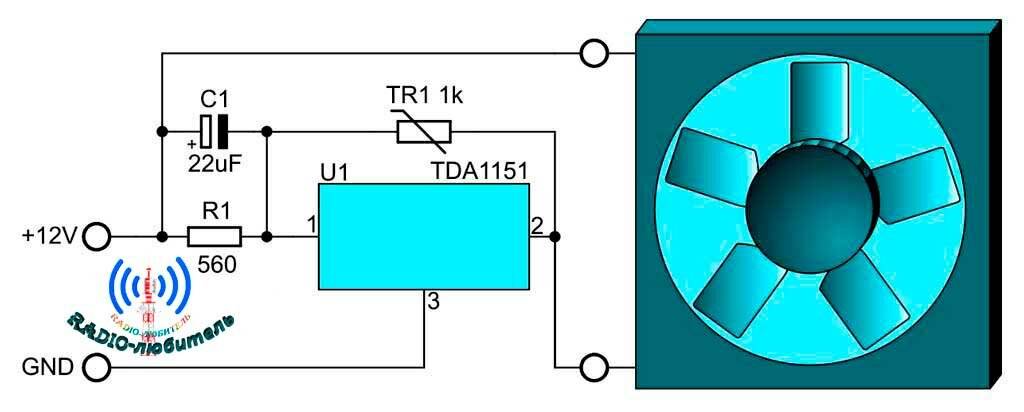
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет множество преимуществ, включая снижение звукового шума, энергоэффективность и улучшенный контроль над приложением двигателя. Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Использование инверторов в качестве источника питания
Распространенным и эффективным способом изменения скорости двигателя является изменение частоты с помощью инвертора в качестве источника питания. Благодаря технологическим достижениям и снижению стоимости инверторов это часто используемый и популярный вариант. Методы, включающие снижение напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмотки двигателя, также используются до сих пор.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать тот, который может обеспечивать не только напряжение и рабочий ток двигателя, но и пусковой ток. Используйте необходимый диапазон изменения скорости, чтобы выбрать диапазон частот, который должен обеспечивать инвертор. Элементы управления инвертора можно использовать для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.
Используйте необходимый диапазон изменения скорости, чтобы выбрать диапазон частот, который должен обеспечивать инвертор. Элементы управления инвертора можно использовать для изменения частоты, подаваемой на двигатель, и скорость двигателя будет соответственно изменяться.
Если абсолютно точное управление скоростью не является критичным для применения двигателя, можно также добавить переменное сопротивление в цепь двигателя для снижения напряжения на основной обмотке. «Пробуксовка» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и частотой вращения вала, обычно близкая к нулю, будет возрастать, так как на двигатель подается пониженная мощность. Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Использование трансформатора переменного напряжения
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменяет напряжение, подаваемое на основную обмотку, что приводит к высокому скольжению и уменьшению скорости управления напряжением. Трансформатор переменного напряжения имеет малые потери по сравнению с переменным резистором. Использование трансформатора может иметь ряд ответвлений, которые изменяют отношение напряжения для управления скоростью двигателя. Эти отводы можно переключать вручную, или трансформатор может быть оснащен переключателем отводов с электроприводом. Несмотря на это, скорость двигателя изменяется с дискретными приращениями, а конкретная конструкция зависит от установки, в которой используется трансформатор.
Этот метод изменяет напряжение, подаваемое на основную обмотку, что приводит к высокому скольжению и уменьшению скорости управления напряжением. Трансформатор переменного напряжения имеет малые потери по сравнению с переменным резистором. Использование трансформатора может иметь ряд ответвлений, которые изменяют отношение напряжения для управления скоростью двигателя. Эти отводы можно переключать вручную, или трансформатор может быть оснащен переключателем отводов с электроприводом. Несмотря на это, скорость двигателя изменяется с дискретными приращениями, а конкретная конструкция зависит от установки, в которой используется трансформатор.
Другие методы управления скоростью двигателя переменного тока
Другой метод управления скоростью двигателя переменного тока заключается в использовании двигателя переменного тока с обмотками с ответвлениями для изменения скорости. Этот метод чаще всего используется в домашних вентиляторах с переключателями высокой, средней и низкой скорости . Эти двигатели имеют заданное количество отводов на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в таких типах приложений не критична, а управление скоростью с помощью этой опции очень экономично.
Эти двигатели имеют заданное количество отводов на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в таких типах приложений не критична, а управление скоростью с помощью этой опции очень экономично.
Работа двигателя с частотно-регулируемым приводом (VFD)
Преобразователь частоты (VFD) является еще одним вариантом и представляет собой контроллер двигателя переменного тока, который приводит двигатель в действие путем изменения частоты и напряжения, подаваемого на него. Частота (или герц) напрямую связана со скоростью двигателя (об/мин), поэтому чем выше частота, тем выше скорость вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для снижения частоты и напряжения в соответствии с требованиями нагрузки двигателя. Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Когда требования к скорости двигателя приложения изменяются, частотно-регулируемый привод эффективно снижает или увеличивает скорость двигателя в соответствии с требованиями к скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производительности за счет более строгого контроля процесса и продление срока службы оборудования при одновременном снижении требований к техническому обслуживанию.
Широтно-импульсная модуляция
Наконец, регулирование величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-управление скоростью работает, управляя двигателем с помощью быстрых серий импульсов «ВКЛ» и «ВЫКЛ» и изменяя рабочий цикл. Мощность, подаваемая на двигатель, регулируется изменением ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
С помощью нескольких простых настроек или изменений можно управлять скоростью электродвигателя переменного тока. Посетите Zoro.com, чтобы узнать о широком ассортименте регуляторов скорости переменного тока от ведущих поставщиков.
Соответствие и пригодность продукта
Информация о продукте, содержащаяся в данном руководстве, предназначена только для общих информационных целей. Такие заявления о продукте не являются рекомендацией продукта или заявлением относительно уместности, точности, полноты, правильности или актуальности предоставленной информации. Информация, представленная в этом руководстве, не заменяет использование вами каких-либо инструкций производителя, технических руководств по продукту или других доступных вам профессиональных ресурсов или консультантов. Всегда читайте, понимайте и следуйте всем инструкциям производителя.
Всегда читайте, понимайте и следуйте всем инструкциям производителя.
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулированием скорости . Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
В нашем окружении для общих целей используется большое количество двигателей, от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Двигатель переменного тока и мотор-редукторы
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Блок инвертора
2.
 Методы управления скоростью различных двигателей с регулированием скорости
Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины. Ротор недорогой, потому что конструкция проста и не использует магнит.
Рис. 2 Конструкция асинхронного двигателя
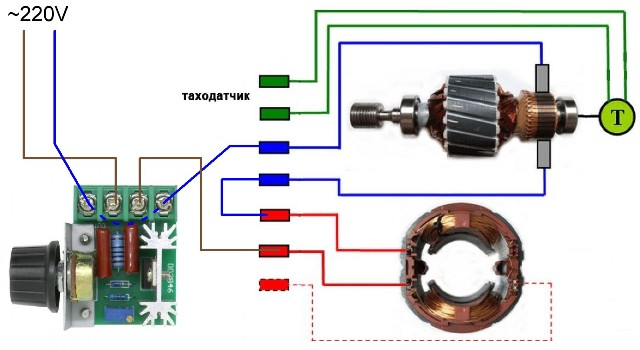
Когда скорость этого двигателя должна контролироваться, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
3. Тахогенератор состоит из магнита, подключенного непосредственно к вал двигателя и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть представлена выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, то скорость вращения N будет изменяться.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [r/ мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный диапазон и диапазон нестабильности на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
4, существует стабильный диапазон и диапазон нестабильности на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4. Характеристики асинхронных двигателей: скорость вращения – крутящий момент
Рис. 5. Простое управление напряжением . На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время ВКЛ/ВЫКЛ каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6 Изменение напряжения с помощью трансформатора
Рис. 7 Изменение напряжения с помощью фазового управления 8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить постоянную скорость управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана блок-схема конфигурации системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения a .
Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a низкий, когда обнаруженное значение скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2. Эта петля максимально уменьшена за счет повышения точности определения скорости.
Эта петля максимально уменьшена за счет повышения точности определения скорости.
Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании этого фазового регулятора с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что позволяет снизить генерируемый шум.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости вращения обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис. 12.
12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением осуществляется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис. 16 (b) Последовательность переключения
16 (b) Последовательность переключения
Элементы переключения подключены к двигателю обмотка, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис. 17 Блок-схема системы бесщеточного двигателя постоянного тока
17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от интегральной схемы Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, так как используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи питания на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, приложенных методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный режим работы в дополнение к области непрерывной работы.
Область ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2. 3.1. Принцип управления скоростью
3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f подаваемого на двигатель напряжения. Инверторный блок изменяет частоту f за счет изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент Т двигателя определяется формулой (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.
T = K ・ I・V / f ・・・( 2)
T : Крутящий момент [Н·м]
V : Напряжение питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Константа
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27.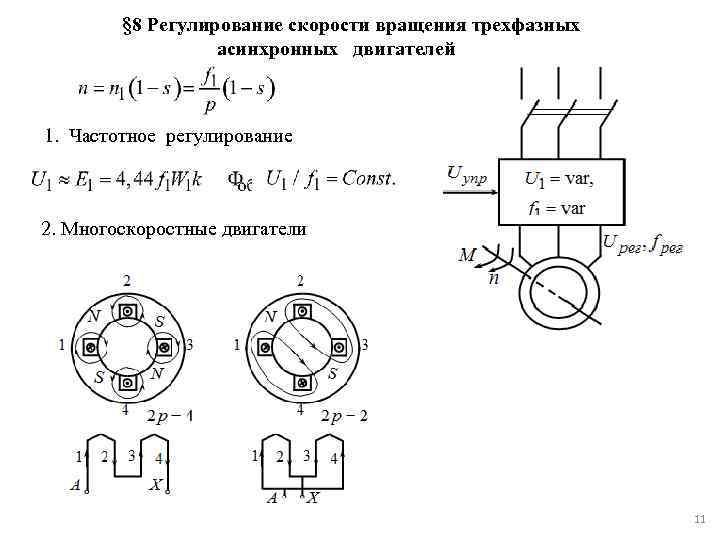 Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
Рис. 25. Характеристики скорости вращения для регулирования с обратной связью
двигатели и инверторные блоки ) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Ссылки
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малогабаритных двигателей переменного тока», Kogyo Chosakai Publishing (1998) 163, стр.