19. Исполнительные механизмы и устройства систем автоматики
1 Общие сведения
2 ИУ электрические, пневматические и гидравлические
3. Электрические исполнительные устройства
4 Основные характеристики ЭИУ с электродвигателями
5 Позиционные ЭИУ
6 ЭИУ постоянной скорости
7 ЭИУ переменной скорости
Общие сведения
Исполнительные механизмы и устройства(ИМ, ИУ) промышленных систем автоматики входят в четвертую функциональную группу изделий ГСП в соответствии с ГОСТ 12997-84 — группу устройств использования командной информации в целях воздействия на процесс и для связи с оператором (сюда же входят рассматриваемые в следующей главе устройства сбора, регистрации, передачи и отображения информации). Термины «исполнительное устройство» и «исполнительный механизм» иногда употребляются как синонимы. В дальнейшем будем преимущественно использовать термин «исполнительное устройство», понимая под этим силовое устройство, назначение которого состоит в изменении регулирующего воздействия на объект управления в соответствии с сигналом (командной информацией), подаваемым на его вход от командного устройства (регулятора, ручного дистанционного задатчика, УВМ).
К основным блокам ИУ относятся исполнительные механизмы (ИМ) и регулирующие органы (РО), которые конструктивно могут быть объединены в едином изделии или собираются из индивидуально выпускаемых блоков. В некоторых случаях ИУ может состоять из одного блока, выполняющего функции исполнительного механизма. Под исполнительным механизмом в общем случае подразумевают блок ИУ, преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, который через соответствующую связь осуществляет воздействие на регулирующий орган или непосредствен но на объект регулирования.Регулирующим органом называют блок ИУ, с помощью которого производится регулирующее воздействие на объект регулирования.
Одной из основных характеристик ИУ является величина перестановочного усилия (момента), передаваемого выходным органом исполнительного механизма на регулирующий орган. Эта величина обычно указывается в паспорте и является основной при энергетическом расчете и выборе ИУ.
По виду энергии, создающей перестановочное усилие, ИМ подразделяются на пневматические, гидравлические и электрические. Существуют ИМ, в которых используются одновременно два вида энергии: электропневматические, электрогидравлические и пневмогидравлические. Наиболее распространенными из них являются электрогидравлические ИМ. Вид энергии управляющего сигнала может отличаться от вида энергии, создающей перестановочное усилие.
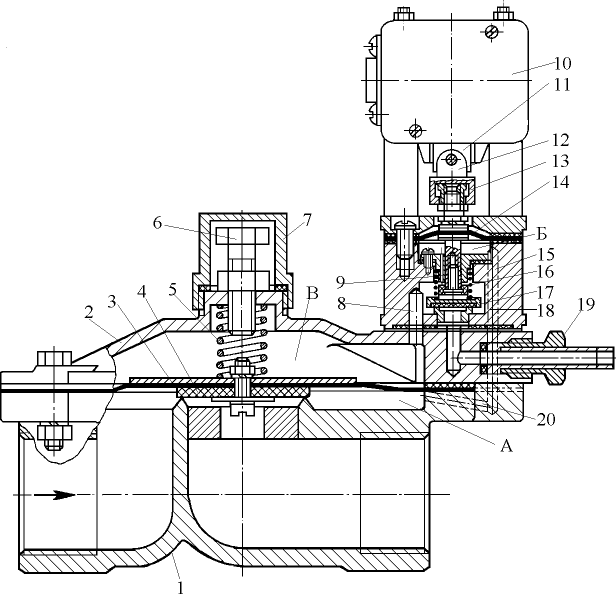
В пневматических ИМ перестановочное усилие создается за счет действия давления сжатого воздуха на мембрану, поршень или сильфон. В соответствии с этим пневматические подразделяются на мембранные, поршневые и сильфонные. Давление сжатого воздуха в пневматических ИУ обычно не превышает 103 кПа.
В гидравлических ИМ перестановочное усилие создается за счет действия давления жидкости на мембрану, поршень или лопасть. В соответствии с этим различают мембранные, поршневые и лопастные гидравлические ИМ. Давление жидкости в них обычно находится в пределах (2,5-20) 103 кПа. Отдельный подкласс гидравлических ИУ составляют ИУ с гидромуфтами. Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на пружинные и беспружинные. В пружинных ИМ перестановочное усилие в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении —силой упругости сжатой пружины. В беспружинных ИМ перестановочное усилие в обоих направлениях создается перепадом давления на рабочем органе механизма.
Электрические ИМ по принципу действия подразделяются на электродвигательные и электромагнитные; по характеру движения выходного элемента — на прямоходные с поступательным движением выходного элемента, поворотные с вращательным движением до 360° (однооборотные) и с вращательным движением на угол более 360° (многооборотные).
Как было отмечено ранее, вторым основным блоком исполнительного устройства является регулирующий орган (РО). Различные РО по виду воздействия на объект подразделяются на два основных типа: дросселирующие и дозирующие. Ниже приводится классификация исполнительных органов.
Таблица 13.1 — Классификация исполнительных органов
I. Дросселирующие II. Дозирующие
1. Для стандартных исполнительных устройств: 2. Механические:
заслоночные
односедельные
трехходовые
двухседельные
диафрагмовые
шланговыеплужковые сбрасыватели
дозаторы
насосы
питатели
компрессоры
2. Для специальных исполнительных устройств: 2. Электрические:
задвижные
крановые
клапаны с поворотными створками
шиберные
направляющие аппараты
специальныереостатные
автотрансформаторы
специальные
Дросселирующие регулирующие органы изменяют гидравлическое сопротивление в системе, воздействующее на расход вещества путем изменения своего проходного сечения. В дозирующих регулирующих органах осуществляется заданное дозирование поступающего вещества или энергии или изменение расхода вещества путем изменения производительности агрегатов. В настоящее время широкое распространение в АСУ ТП получили дросселирующие РО, хотя применение дозирующих РО экономически более оправдано.
К вспомогательным блокам исполнительных устройств относят блоки, расширяющие область применения ИУ и обеспечивающие выполнение ряда дополнительных функций. К вспомогательным блокам относятся блок ручного управления для механического (ручного) управления регулирующим органом, блок сигнализации конечных положений для выдачи информации о положении выходного элемента исполнительного механизма или затвора регулирующего органа, фиксаторы положения для фиксации положения выходного элемента исполнительного механизма или затвора регулирующего органа, блок дистанционного управления, блок обратной связи для улучшения статических и динамических характеристик ИУ или всей замкнутой системы регулирования.
ИУ электрические, пневматические и гидравлические
По виду энергии, создающей перестановочное усилие, ИМ подразделяются на пневматические, гидравлические и электрические. Существуют ИМ, в которых используются одновременно два вида энергии: электропневматические, электрогидравлические и пневмогидравлические. Наиболее распространенными из них являются электрогидравлические ИМ.
В пневматических ИМ перестановочное усилие создается за счет действия давления сжатого воздуха на мембрану, поршень или сильфон. В соответствии с этим пневматические подразделяются на мембранные, поршневые и сильфонные. Давление сжатого воздуха в пневматических ИУ обычно не превышает 103 кПа.
В гидравлических ИМ перестановочное усилие создается за счет действия давления жидкости на мембрану, поршень или лопасть. В соответствии с этим различают мембранные, поршневые и лопастные гидравлические ИМ. Давление жидкости в них обычно находится в пределах (2,5-20) 103 кПа. Отдельный подкласс гидравлических ИУ составляют ИУ с гидромуфтами. Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на пружинные и беспружинные. В пружинных ИМ перестановочное усилие в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении —силой упругости сжатой пружины. В беспружинных ИМ перестановочное усилие в обоих направлениях создается перепадом давления на рабочем органе механизма.
Электрические ИМ по принципу действия подразделяются на электродвигательные и электромагнитные; по характеру движения выходного элемента — на прямоходные с поступательным движением выходного элемента, поворотные с вращательным движением до 360° (однооборотные) и с вращательным движением на угол более 360° (многооборотные).
Как было отмечено ранее, вторым основным блоком исполнительного устройства является регулирующий орган (РО). Различные РО по виду воздействия на объект подразделяются на два основных типа: дросселирующие и дозирующие.
К вспомогательным блокам исполнительных устройств относят блоки, расширяющие область применения ИУ и обеспечивающие выполнение ряда дополнительных функций. К вспомогательным блокам относятся блок ручного управления для механического (ручного) управления регулирующим органом, блок сигнализации конечных положений для выдачи информации о положении выходного элемента исполнительного механизма или затвора регулирующего органа, фиксаторы положения для фиксации положения выходного элемента исполнительного механизма или затвора регулирующего органа, блок дистанционного управления, блок обратной связи для улучшения статических и динамических характеристик ИУ или всей замкнутой системы регулирования.
Электрические исполнительные устройства (ЭИУ) находят преимущественное распространение в системах автоматизации, использующих изделия электрической ветви средств автоматизации. При необходимости пневматические и гидравлические ИУ дополняются электропневмо- либо электрогидропреобразователями.
ЭИУ разделяются на четыре группы:
ЭИУ позиционного действия;
ЭИУ постоянной скорости;
ЭИУ переменной скорости;
усилители мощности.
Исполнительные механизмы ЭИУ позиционного типа, постоянной или переменной скорости состоят из электродвигателя и редуктора. Такой ИМ по своим динамическим свойствам соответствует интегрирующему звену, если в качестве выходной переменной в ИУ принят угол поворота (перемещение). Вследствие этого силовая часть может формировать интегральную составляющую таких законов регулирования, как ПИ и ПИД в структуре регулятора (собственно регулятор при этом формирует П- и ПД-составляю-щие). Наибольшее распространение получило именно такое использование ИМ.
Другой способ использования ИМ с электродвигателями состоит в охвате двигателя жесткой обратной связью, и в этом случае ЭИУ является пропорциональным звеном (точнее, малоинерционным), положение выходного органа которого пропорционально входному сигналу. ИМ с корректирующими обратными связями используют в ЭИУ переменной скорости.
3. Электрические исполнительные устройства
Электрические исполнительные устройства (ЭИУ) находят преимущественное распространение в системах автоматизации, использующих изделия электрической ветви ГСП. При необходимости использовать пневматические и гидравлические ИУ последние дополняются электропневмо- и электрогидропреобразователями. ЭИУ разделяются на четыре группы: ЭИУ позиционного действия; ЭИУ постоянной скорости; ЭИУ переменной скорости; усилители мощности.
Исполнительные механизмы ЭИУ позиционного типа, постоянной или переменной скорости состоят из электродвигателя и редуктора. Такой ИМ по своим динамическим свойствам соответствует интегрирующему звену, если в качестве выходной переменной в ИУ принят угол поворота (перемещение). Вследствие этого силовая часть может формировать интегральную составляющую таких законов регулирования, как ПИ и ПИД в структуре регулятора (собственно регулятор при этом формирует П- и ПД-составляющие). Наибольшее распространение получило именно такое использование ИМ.
Другой способ использования ИМ с электродвигателями состоит в охвате двигателя жесткой обратной связью, и в этом случае ЭИУ является пропорциональным звеном (точнее, малоинерционным), положение выходного органа которого пропорционально входному сигналу. ИМ с корректирующими обратными связями используют в ЭИУ переменной скорости.
Качество работы ЭИУ с электродвигателями характеризуют такими показателями, как номинальный момент, время полного хода, выбег, люфт, гистерезис, импульсные характеристики, режим работы.
Номинальный момент ИМ развивают при всех допустимых условиях эксплуатации, при понижении напряжения питания до 0,85Uс.ном.Пусковой момент при номинальном напряжении питания должен не менее чем в 1,7 раза превышать номинальный.
Время полного хода ТИМ выбирают исходя из допустимого вреени ТРО перестановки затвора РО от начала до конца. Это время равно TИМ=?-1TPO, где ? — отношение диапазона рабочего перемещения выходного органа к величине полного хода.
Выбег есть перемещение выходного органа ИМ после выключения механизма, работающего в установившемся режиме. Выбег желательно иметь таким, чтобы после выключения двигателя изменение сигнала обратной связи по регулируемому параметру было в пределах установленной зоны нечувствительности регулятора. Согласно требованиям ГОСТ 7192—80Е, величина выбега не должна быть более 1% для ЭИУ с временем полного хода 10 с, 0,5% для механизмов с временем 25 с и 0,25% для механизмов с временем 63 с и более.
Люфт и гистерезис характеризуют нелинейности статической характеристики ЭИУ. Люфт образуется свободным ходом выходного органа при неподвижном вале электродвигателя из-за зазора в зацеплении кинематических узлов редуктора, износа контактирующих поверхностей. Согласно ГОСТ 7192—80Е, люфт выходного органа не должен превышать 1° для однооборотных ЭИУ с номинальной нагрузкой 40 Н-м и менее; 0,75° для однооборотных ЭИУ нагрузкой более 40 Н-м; 3° для многооборотных ЭИУ; 0,2 мм для прямоходных ЭИУ с нагрузкой до 1000 Н и 0,5 мм при нагрузке свыше 1000 Н. Гистерезис между положением выходного органа и сигналом датчика положения складывается из люфта механической передачи и вариаций показания датчика. По стандарту гистерезис не должен быть более 1,5% от полной шкалы показаний датчика при нелинейности статической характеристики менее 2,5%.
Импульсная характеристика ЭИУ определяется как средняя относительная скорость S перемещения выходного органа. Для ЭИУ постоянной скорости с импульсным сигналом управления рассматривается отношение величины перемещения выходного органа к длительности импульса, вызвавшего перемещение. Если это перемещение брать в долях от полного хода, а длительность — в долях времени полного хода, то соответственно их отношение даст значение S. Значение S=f(?t), где ?t — относительная длительность импульса управления, и образует импульсную характеристику. Для идеального ЭИУ постоянной скорости S =1. Реальное значение S для отечественных ЭИУ постоянной скорости лежит в диапазоне от 0,5 до 1,5.
Режим работы ИУ — повторно-кратковременный реверсивный, с частотой до 320 включений в час и продолжительностью до 25% при нагрузке на выходном органе в пределах от номинальной противодействующей до 0,5 номинального значения сопутствующей. К ЭИУ предъявляются требования к повышенной частоте включений: в течение часа 600 и более с интервалом времени между выключением и включением на обратный ход не менее 50 мс.
Исполнительные элементы.
Исполнительные элементы представляют собой конечные звенья автоматических устройств. На объект управления они действуют или непосредственно или через какой-либо регулирующий орган машины. Исполнительные элементы автоматических устройств разделяют на гидравлические, электрические, механические, комбинированные и т. п.
Электрические исполнительные механизмы отличаются простотой, надежностью, точностью. Их широко применяют при комплексной автоматизации, разделяя на две группы: электродвигательные и электромагнитные исполнительные механизмы. Электродвигательные механизмы в зависимости от применяемого двигателя разделяют на две группы:
1. Исполнительные механизмы для программного управления используют электродвигатели постоянного тока с последовательным или независимым возбуждением, одно-, двух- и трехфазные асинхронные или синхронные. Механизмы этой группы служат силовыми звеньями систем автоматизации с большими мощностями на выходных валах и имеют нелинейные характеристики, которые существенно влияют на динамические свойства системы.
2. Исполнительные механизмы, предназначенные для сочленения трубопроводной и запорной арматур, обеспечивают двухпозиционноё дистанционное управление. Одно из главных требований к выбору этого типа исполнительных механизмов — быстродействие срабатывания. По способу ограничения значения крутящего момента они делятся на механизмы с реле максимального тока и односторонней муфтой и механизмы с двухсторонней муфтой сочленения.
Специальные исполнительные механизмы состоят из электродвигателя, редуктора, узла обратной связи, конечных выключателей, измерительного преобразователя положения выходного элемента. Исполнительные механизмы подразделяют на три основные группы: однооборотные, многооборотные и прямоходные. Исполнительные механизмы этой группы изготовляют с постоянной и переменной скоростью перемещения выходного элемента. Механизмы с постоянной скоростью применяют в импульсных системах, ас переменной скоростью — в аналоговых системах регулирования. Механизмы с переменной скоростью используют редко из-за нелинейности характеристики.
Электромагнитные исполнительные механизмы подразделяют на электрические муфты и магниты. Муфты делятся на два типа: трения и скольжения. В муфтах трения вращающий момент создается сцеплением выходного вала с двигателем за счет сухого или вязкого трения. Муфты сухого трения обеспечивают контакт трущихся поверхностей при помощи электромагнитных сил. Муфты этой группы имеют большой коэффициент передачи (отношение мощности муфты на выходном валу к управляющей входной мощности), достигающий 15 000, однако быстродействие их невелико — в среднем оно равно 0,1 с. Характеристики муфт сухого трения нелинейны.
Муфты вязкого трения работают на основе намагничивания ферропорошкового или магнитоэмульсионного слоя между ведомым и ведущим элементом муфты. Характеристики муфт этого типа близки к линейным. Коэффициент передачи достигает 3500, быстродействие в среднем равняется 0,02 с. Муфты вязкого трения выдерживают большие перегрузки.
В муфтах скольжения используется взаимодействие токов ротора и вращающего поля статора. Муфты скольжения делятся на три группы: гистерезисные, конденсаторные я индукционные. Обычно муфты этой группы имеют нелинейные характеристики и малые мощности.
При автоматизации технологических процессов широко используют исполнительные механизмы на основе электрических магнитов. Основной показатель электромагнитов — условная полезная работа, определяемая произведением тягового усилия на ход якоря. Отношение массы электромагнита к величине условной полезной работы называется коэффициентом экономичности электромагнита.
Системы автоматического управления и элементы автоматики.
Система автоматического управления технологическим процессом в животноводстве.
Элементы автоматики и их функции.
Электромагнитное реле.
Исполнительные элементы.
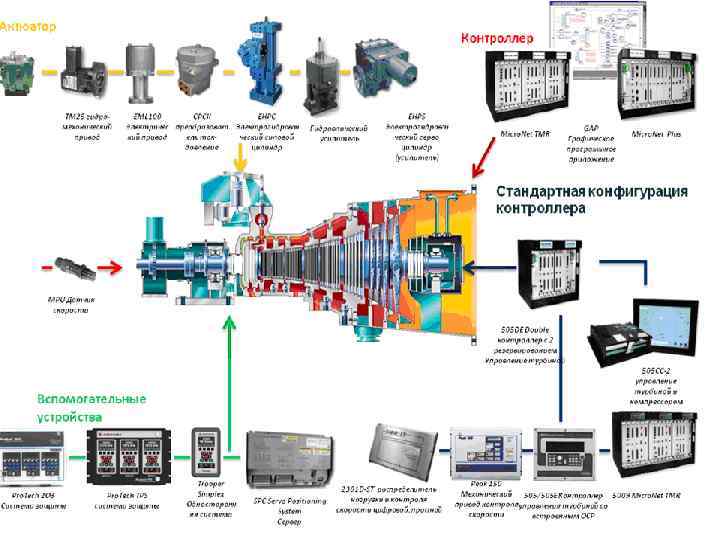
Актуаторы, активизирующие функции промышленной автоматизации
Роль актуаторов в реализации функций промышленной автоматизации
С ростом использования автоматизированных машин/систем также возрос спрос на приводы, которые играют жизненно важную роль в процессе автоматизации. Приводы, которые отвечают за перемещение, управление или позиционирование механизма или системы, делают работу автоматизированного оборудования плавной и легкой. Существует несколько типов приводов с разным ходом, скоростью, формой, размером и производительностью, которые лучше всего подходят для применения или, другими словами, обеспечивают наилучшее возможное срабатывание. Давайте теперь рассмотрим несколько отраслей, в которых исполнительные механизмы играют решающую роль в автоматизированных системах для упрощения процессов, которые когда-то выполнялись вручную.
Солнечная энергия: В промышленности используется несколько типов приводов, включая шарико-винтовые приводы и приводы ACME, для автоматизации работы различных устройств слежения за солнечной энергией, оборудования для концентрации солнечной энергии, фотоэлектрических устройств и оборудования для концентрации фотоэлектрических элементов, а также ряда других. Таким образом, солнечные приводы играют жизненно важную роль в производстве солнечной энергии, обеспечивая желаемое движение используемого оборудования.
Военные: Приводы для военной промышленности прочно сконструированы, чтобы выдерживать суровые условия окружающей среды, экстремальные погодные условия и сильные удары. Эти военные приводы в основном используются в танках, артиллерийских установках, самолетах, истребителях, вертолетах, кораблях и роботах, потому что они обеспечивают полное движение.
Спутник: Промышленность быстро перешла от механизации к автоматизации. Использование нескольких линейных и вращательных приводов помогает автоматизировать работу нескольких видов оборудования. К ним относятся параболические антенны, датчики, оборудование для съемки Земли и так далее. Специально разработанные и высококачественные сателлитные приводы востребованы в промышленности для точного позиционирования и управления движением.
Строительство: Промышленность зависит от высокоскоростных автоматизированных машин/систем для выполнения нескольких опасных и утомительных задач. В этих системах используются приводы различных типов, поскольку они, как известно, обеспечивают мощные движения тяжелой техники, такой как погрузочные машины, тягачи и краны. Приводы для строительной отрасли созданы для обеспечения долговечной, надежной и долговечной работы.
Склад: Современные склады полагаются на передовые автоматизированные системы для оптимизации управления логистикой и связанных с ней операций. Широкий спектр приводов используется при создании роботизированных систем, конвейерных установок, вилочных погрузчиков и т. д., чтобы обеспечить превосходную производительность с точки зрения точности, мощности и скорости работы. Приводы для склада предназначены для работы в суровых условиях и в экстремальных условиях.
Помимо вышеупомянутых отраслей, приводы помогают автоматизировать несколько процессов и систем в сельском хозяйстве, пищевой, медицинской, ядерной, автомобильной, производственной, художественной и развлекательной отраслях, а также на транспорте. несколько спецификаций от огромного количества производителей. Здесь выбор правильного производителя становится решающим. Чтобы добиться наилучших результатов от приводов, важно, чтобы они производились в соответствии с высочайшими стандартами качества с учетом специфических требований автоматизации в промышленности. Это требует важности партнерства только с ведущими производителями в отрасли. Компания Venture Mfg. Co. пользуется доверием, когда речь идет о производстве линейных приводов хорошего качества для различных приложений автоматизации в различных отраслях.
Распространяйте информацию. Поделиться этой записью!
Типы приводов | Технология автоматизации предприятий
Что такое привод?
Приводы представляют собой электромеханические или механические устройства, использующие энергию для преобразования управляющего сигнала в механическое движение. Они могут приводиться в действие электрически, вручную или с помощью различных жидкостей, таких как гидравлика, воздух и т. д.
Компании по автоматизации предприятий/промышленные предприятия используют приводы для управления клапанами, гидравлическими муфтами, демпферами и другими устройствами, необходимыми для управления промышленными процессами. Примеры приводов включают электродвигатель, шаговый двигатель, гидравлический цилиндр, гидравлические приводы, винтовой домкрат, пьезоэлектрический привод и т. д.
При выборе привода он должен иметь указанные ниже рабочие характеристики, поскольку они позволят системе управления работать в соответствии с проектом.
Основные рабочие характеристики привода:
• Приводы должны работать стабильно и без изменений под нагрузкой • Они должны иметь прочную промышленную конструкцию, способную работать в различных условиях без снижения производительности . • Необходимо минимальное периодическое обслуживание. • Приводы должны иметь точное, воспроизводимое позиционирование, как правило, лучше, чем 0,15% диапазона . • Привод должен иметь возможность немедленного пуска и остановки без мертвого времени или превышения положения
Привод, обладающий указанными выше рабочими характеристиками, дает два преимущества:
a) Способность точно и мгновенно следовать сигналу задания от контроллера . Это гарантирует, что исполнительный механизм будет реагировать точно в соответствии с указаниями контроллера. В этом случае это демонстрирует, что исполнительный механизм не является ограничивающим фактором в контуре управления, и контроллер может работать на оптимальных уровнях.
b) Приводы, разработанные с указанными выше рабочими характеристиками, будут более прочными, чем обычные приводы. Они будут способны к большой степени надежности.
Типы приводов:
Ниже приведены типы приводов:
• Электрический линейный • Электрический поворотный стол • Fluid Power Linear • Fluid Power Rotary • Линейные цепные приводы • Ручной линейный
a) Электрические линейные приводы
Электрические линейные приводы представляют собой электрические механические устройства, состоящие из двигателей, линейных направляющих и приводных механизмов. Эти приводы используются для преобразования электрической энергии в линейное перемещение за счет механической передачи, электромагнетизма или теплового расширения для обеспечения прямолинейного толкающего/тянущего движения.
Основные характеристики: Тип привода, тип двигателя, монтажная конфигурация, а также другие физические размеры и электрические характеристики.
Использование: • Они используются в приложениях автоматизации, когда компоненту машины, инструменту и т. д. требуется контролируемое перемещение в определенное положение. • Электрические линейные приводы широко используются в самых разных отраслях, где требуется линейное позиционирование
Приложения Типичные области применения включают открывание и закрывание демпферов, запирание дверей, торможение машин и т. д.
b) Электрический поворотный
Электрические поворотные приводы используются для преобразования электрической энергии во вращательное движение. Это механические устройства с электрическим приводом, содержащие двигатели и механизмы выходных валов с ограниченным ходом вращения.
Основные характеристики: Они включают в себя предполагаемое применение, метод привода, конфигурации выходов, количество позиций, конфигурацию монтажа, а также физические размеры и электрические характеристики по мере необходимости.
Использование: Они используются в приложениях автоматизации, когда ворота, клапаны и т. д. требуют контролируемого перемещения в определенные положения вращения. Они используются в самых разных отраслях, где необходимо позиционирование.
Приложения Типичные области применения электрических поворотных приводов включают четвертьоборотные клапаны, окна, робототехнику и т. д.
c) Гидравлические линейные приводы
Гидравлические линейные приводы представляют собой механические устройства, содержащие цилиндровые и поршневые механизмы, которые производят линейное перемещение с помощью гидравлической жидкости. , газ или дифференциальное давление воздуха.
Основные характеристики: Они включают в себя предполагаемое применение, тип гидравлической системы, конфигурацию монтажа, длину хода и допустимое усилие, а также требуемые физические размеры.
Использование: Гидравлические линейные приводы используются в основном в приложениях автоматизации, когда объект требует контролируемого перемещения в определенное положение. Они используются в самых разных отраслях, где необходимо линейное позиционирование.
Приложения Типичные области применения включают в себя открытие и закрытие заслонок, зажим, сварку и т. д.
d) Цепные линейные приводы
Цепные линейные приводы представляют собой механические устройства, содержащие звездочки и участки цепи, используемые для обеспечения линейного движения посредством свободные концы специально разработанных цепей.
Основные характеристики: Спецификации линейных цепных приводов включают предполагаемое применение, длину срабатывания, способ и механизм привода, размер цепи и конфигурацию монтажа.
Использование: Они используются в приложениях управления движением для обеспечения прямолинейного толкающего или тянущего движения.
e) Ручные линейные приводы
Ручные линейные приводы обеспечивают линейное перемещение за счет перемещения вращаемых вручную винтов или шестерен.


 Термины
Термины Регулирующим
Регулирующим
 В беспружинных ИМ перестановочное
В беспружинных ИМ перестановочное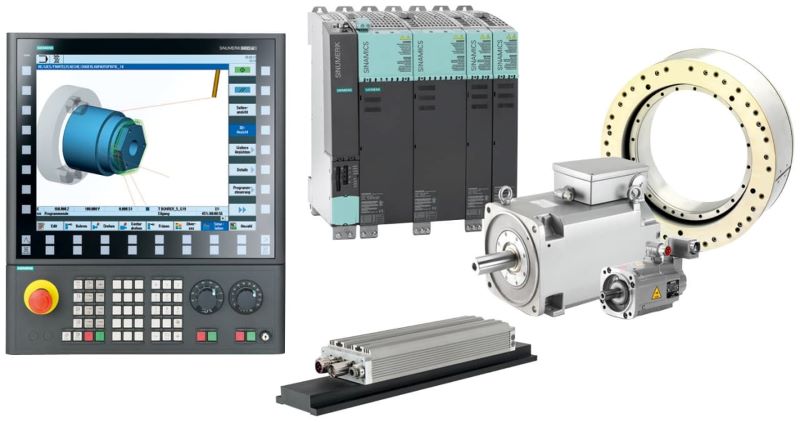 Дозирующие
Дозирующие В дозирующих
В дозирующих
 В соответствии с этим
В соответствии с этим


 ЭИУ
ЭИУ ИМ с корректирующими
ИМ с корректирующими Выбег
Выбег Гистерезис между положением выходного
Гистерезис между положением выходного Реальное значение S
Реальное значение S п.
п. По способу ограничения значения крутящего момента они делятся на механизмы с реле максимального тока и односторонней муфтой и механизмы с двухсторонней муфтой сочленения.
По способу ограничения значения крутящего момента они делятся на механизмы с реле максимального тока и односторонней муфтой и механизмы с двухсторонней муфтой сочленения. Муфты сухого трения обеспечивают контакт трущихся поверхностей при помощи электромагнитных сил. Муфты этой группы имеют большой коэффициент передачи (отношение мощности муфты на выходном валу к управляющей входной мощности), достигающий 15 000, однако быстродействие их невелико — в среднем оно равно 0,1 с. Характеристики муфт сухого трения нелинейны.
Муфты сухого трения обеспечивают контакт трущихся поверхностей при помощи электромагнитных сил. Муфты этой группы имеют большой коэффициент передачи (отношение мощности муфты на выходном валу к управляющей входной мощности), достигающий 15 000, однако быстродействие их невелико — в среднем оно равно 0,1 с. Характеристики муфт сухого трения нелинейны. Основной показатель электромагнитов — условная полезная работа, определяемая произведением тягового усилия на ход якоря. Отношение массы электромагнита к величине условной полезной работы называется коэффициентом экономичности электромагнита.
Основной показатель электромагнитов — условная полезная работа, определяемая произведением тягового усилия на ход якоря. Отношение массы электромагнита к величине условной полезной работы называется коэффициентом экономичности электромагнита.

 Широкий спектр приводов используется при создании роботизированных систем, конвейерных установок, вилочных погрузчиков и т. д., чтобы обеспечить превосходную производительность с точки зрения точности, мощности и скорости работы. Приводы для склада предназначены для работы в суровых условиях и в экстремальных условиях.
Широкий спектр приводов используется при создании роботизированных систем, конвейерных установок, вилочных погрузчиков и т. д., чтобы обеспечить превосходную производительность с точки зрения точности, мощности и скорости работы. Приводы для склада предназначены для работы в суровых условиях и в экстремальных условиях. Co. пользуется доверием, когда речь идет о производстве линейных приводов хорошего качества для различных приложений автоматизации в различных отраслях.
Co. пользуется доверием, когда речь идет о производстве линейных приводов хорошего качества для различных приложений автоматизации в различных отраслях. д.
д. В этом случае это демонстрирует, что исполнительный механизм не является ограничивающим фактором в контуре управления, и контроллер может работать на оптимальных уровнях.
В этом случае это демонстрирует, что исполнительный механизм не является ограничивающим фактором в контуре управления, и контроллер может работать на оптимальных уровнях.

 Они используются в самых разных отраслях, где необходимо линейное позиционирование.
Они используются в самых разных отраслях, где необходимо линейное позиционирование.