

Содержание
Однофазный асинхронный электродвигатель
Дмитрий Левкин
- Однофазный электродвигатель с пусковой обмоткой
- Конструкция однофазного асинхронного двигателя
- Принцип работы однофазного двигателя
- Пуск однофазного двигателя
- Подключение однофазного двигателя
- Однофазный электродвигатель с экранированными полюсами
- Электродвигатель с асимметричным магнитопроводом статора
Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.
Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Остановить
Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Остановить
Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя
Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить
Остановить
Вращающееся магнитное поле пронизывающее ротор
Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр.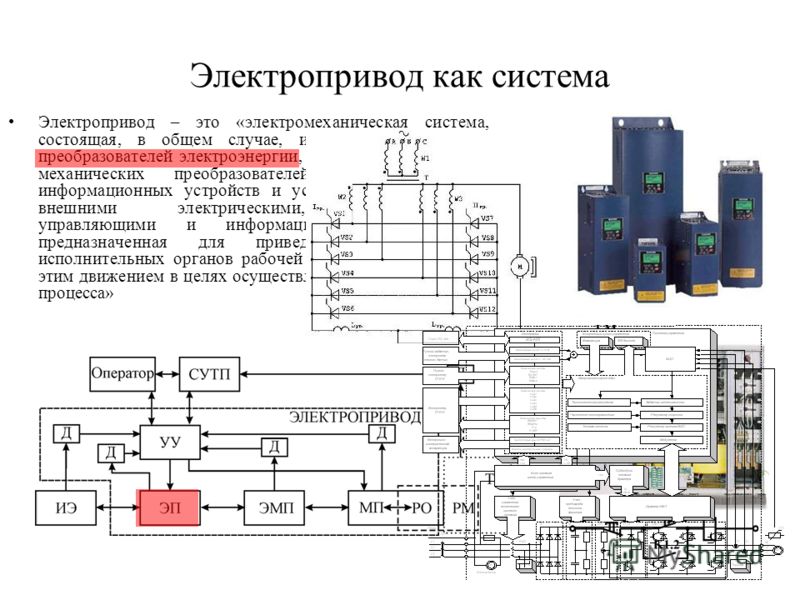 При этом частота тока в роторе пропорциональна скольжению, следовательно:
При этом частота тока в роторе пропорциональна скольжению, следовательно:
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,
скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц
Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.

Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.
С помощью одной фазы нельзя запустить ротор
Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение .
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов.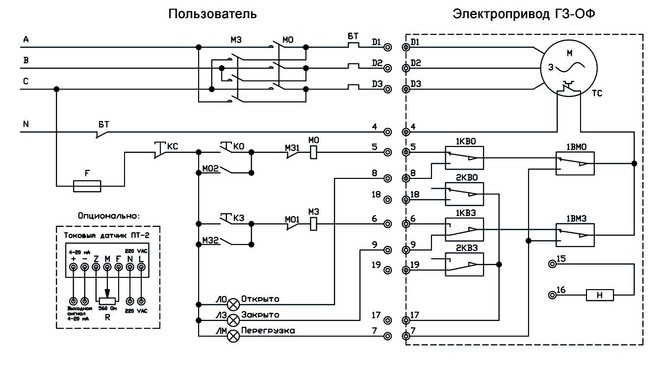 Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.
Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки
Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk.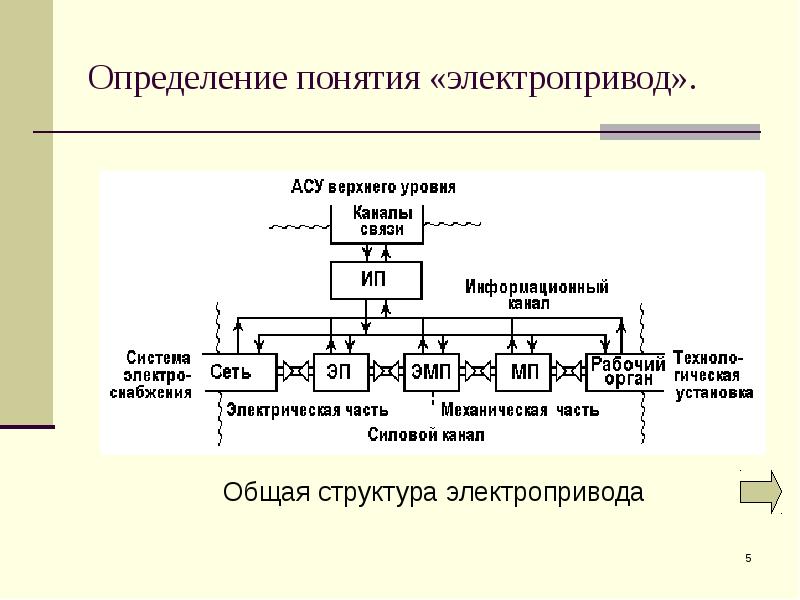 Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.
Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
Основные параметры электродвигателя
Общие параметры для всех электродвигателей
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- М. М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Библиографический список
 М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
Электропривод — комплектный электропривод постоянного тока, комплектный электропривод переменного тока
Комплектные устройства управления электроприводами
- Комплектные устройства управления двигателями постоянного тока
- Комплектные устройства управления асинхронными двигателями
Комплектный электропривод
- Комплектный электропривод постоянного тока
Комплектующие к электроприводам
- Блоки
- Платы
- Комплектующие и запчасти
Электропривод
– электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Электропривод
состоит из:
1. Преобразовательного устройства,
применяемого для
a) преобразования рода тока
— переменный в постоянный
— постоянный в переменный
б) преобразования источника напряжения в источник тока и обратно
в) преобразования частоты
г) преобразования числа фаз
д) преобразования уровня напряжения (тока)
2. Электродвигательного устройства,
предназначенного для преобразования электрической энергии в механическую или механической энергии в электрическую (электродвигатели переменного и постоянного тока).
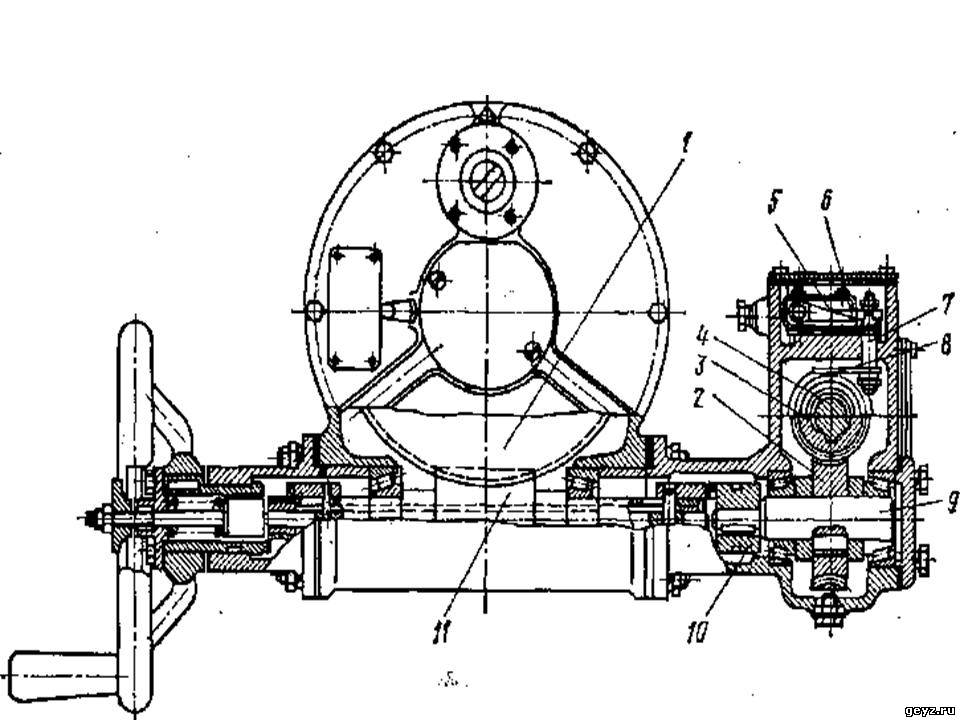
3. Передаточного устройства,
предназначенного для передачи механической энергии от электродвигателя к исполнительному органу, преобразования видов движения, согласования скоростей, моментов, усилий (редуктор, ременная передача, электромагнитная муфта и т.п.).
4. Исполнительного органа,
осуществляющего производственные и технологические операции для обработки изделий, подъем и перемещение грузов и т.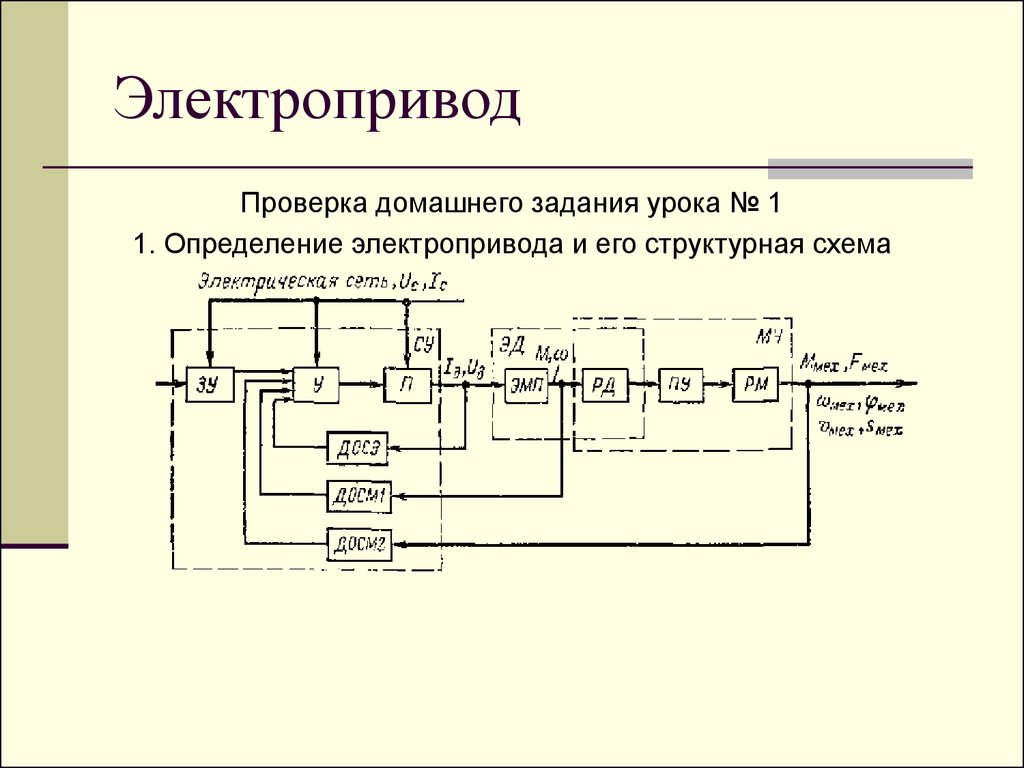 п. (штиндель токарного станка, фреза фрезерного станка, рабочие валки прокатного стана, крыльчатка насосов и вентиляторов и т.п.).
п. (штиндель токарного станка, фреза фрезерного станка, рабочие валки прокатного стана, крыльчатка насосов и вентиляторов и т.п.).
5. Управляющего устройства,
предназначенного для управления преобразовательным, электродвигательным и передаточными устройствами (регуляторы, микропроцессоры, программируемые контроллеры, релейно-контакторные схемы управления и т.п.).
Электропривод
различают по следующим основным параметрам:
1. По роду тока
а) электропривод постоянного тока, имеющий электродвигатель постоянного тока — комплектный электропривод постоянного тока
б) электропривод переменного тока, имеющий электродвигатель переменного тока — комплектный электропривод переменного тока
2. По направлению вращения электродвигателя
а) нереверсивный, имеющий только одно направление вращения электродвигателя
б) реверсивный, обеспечивающий вращение электродвигателя в противоположных направлениях
3. По характеру изменения параметров
а) регулируемый, параметры которого могут изменяться под воздействием управляющего устройства
б) нерегулируемый, параметры которого изменяются только в результате возмущающих воздействий
Основа электронной мобильности — электрические приводы
Новые модели автомобилей основаны на эффективных решениях с электроприводом, чтобы сделать стратегии устойчивого развития OEM-производителей более эффективными, обеспечивая при этом комфорт и превосходные впечатления от вождения для своих потребителей.
Количество электрифицированных автомобилей на наших дорогах продолжает расти с каждым годом. Новые модели OEM-производителей нуждаются в эффективных решениях с электроприводом для удовлетворения растущих потребностей в выбросах CO2, предлагая потребителям комфортное вождение наряду с оптимальной производительностью и высоким уровнем удобства использования. Между тем, развитие отрасли показывает растущую потребность в специалистах, которые специализируются на электроприводах (EDU) и обладают необходимыми знаниями и опытом. Кроме того, легко адаптируемые и быстро развертываемые системные решения необходимы для сокращения общего времени разработки, что позволяет ускорить реализацию новых концепций электромобилей.
Что такое EDU и почему они важны для электрификации трансмиссии?
Блок электропривода — решение с широкими возможностями модификации для любых нужд разработки
Блок электропривода (EDU) состоит из 3 основных модулей: силовой электроники, редуктора и электродвигателя. Все три должны работать в полной гармонии, чтобы автомобиль двигался.
Все три должны работать в полной гармонии, чтобы автомобиль двигался.
EDU обеспечивают динамичное вождение, удовольствие от вождения и комфорт, а также экономию средств и эффективность всей системы. Основное назначение – эффективное преобразование электрической энергии в движение. Тип используемого источника энергии может варьироваться в каждом конкретном случае — от обычного электричества от зарядных станций или розеток, хранящегося в батареях, до топливных элементов — все возможно.
Силовая электроника EDU
Силовая электроника отвечает за общее управление электронным приводом и преобразует постоянное напряжение мощных аккумуляторов в трехфазное переменное напряжение. Эта подсистема несет в себе логику всей системы EDU и регулирует ток двигателя. Для электрических и гибридных систем привода достижение максимальной эффективности считается более важным, чем максимальная мощность. Ожидается, что инвертор обеспечит высокую гибкость, долговечность, доступность мощности и позволит одновременно использовать переменное и максимальное напряжение. Чтобы обеспечить постоянный крутящий момент даже при самых высоких уровнях производительности, необходимо соблюдать строгие требования безопасности и соответствовать стандартам ISO, включая высшую классификацию безопасности ASIL уровня D для некоторых важных для безопасности системных функций с высоким риском.
Чтобы обеспечить постоянный крутящий момент даже при самых высоких уровнях производительности, необходимо соблюдать строгие требования безопасности и соответствовать стандартам ISO, включая высшую классификацию безопасности ASIL уровня D для некоторых важных для безопасности системных функций с высоким риском.
Другими важными темами являются время зарядки и скорость зарядки. Требования к высоким возможностям зарядки требуют нового поколения инверторов, которые обеспечивают как можно более низкие потери в процессе зарядки, а также выдерживают чрезвычайно высокие напряжения. Поскольку силовая электроника управляет потоком тока между аккумулятором и двигателем, ее конструкция должна быть способна эффективно справляться с такими высокими токами. По этой причине все большую популярность приобретают инверторы на 800 В, обеспечивающие вдвое большую скорость зарядки по сравнению с инверторами на 400 В. Более высокая скорость зарядки достигается с помощью новых технологий, таких как полупроводники на основе карбида кремния, которые могут выдерживать даже более высокие обратные напряжения. Технология SiC теряет меньше тепла, чем обычные кремниевые полупроводники, что выводит силовую электронику на совершенно новый уровень.
Технология SiC теряет меньше тепла, чем обычные кремниевые полупроводники, что выводит силовую электронику на совершенно новый уровень.
Электродвигатель EDU
Электродвигатель является ключевым элементом будущих силовых агрегатов электромобилей, поскольку он необходим как в гибридных, так и в чисто электрических транспортных средствах (подробнее о различных типах транспортных средств читайте здесь). Он преобразует электрическую энергию в механическую. В зависимости от постоянной и пиковой мощности электродвигатели можно разделить на разные диапазоны мощности. Некоторые новые модели транспортных средств уже относятся к категории 800 В. В зависимости от общих требований к производительности, установленных OEM-производителями, принимается решение о том, может ли один электродвигатель обеспечить желаемую мощность или необходимо несколько электродвигателей. В наших самых популярных вариантах EDU мощность электродвигателя передается на полуоси посредством многоступенчатой прямозубой или планетарной передачи и дифференциала.
Трансмиссия на ЭБУ
Трансмиссия в конечном итоге отвечает за передачу крутящего момента от двигателя к колесам с наиболее эффективным передаточным числом. При выборе EDU количество передач в трансмиссии оказывает значительное влияние на сложность конструкции, функциональные возможности, общую производительность и эффективность системы, а также влияет на другие факторы, такие как размер электродвигателя и стоимость системы. Основное внимание уделяется, в частности, двум аспектам производительности: мощности ускорения и запасу хода. Для широкого спектра применений наиболее эффективными являются 1-2-ступенчатые передачи. В отличие от 1-ступенчатой трансмиссии, 2-ступенчатая трансмиссия позволяет увеличить запас хода и максимальную скорость при той же мощности ускорения. В многоступенчатых трансмиссиях трансмиссия должна иметь возможность переключения передач для обеспечения ускорения без разрыва тяги, что, как известно, характерно для электромобилей.
Коробки передач EDU, как правило, имеют дополнительные функции, такие как электрически активируемая блокировка парковки внутри электропривода, которая способствует безопасности автомобиля и предотвращает движение припаркованного автомобиля.
Программное обеспечение управления
Всеобъемлющим функциональным элементом, особенно актуальным в наше цифровое время с высокой степенью связи, является программное обеспечение управления . Он включает в себя функции регулирования и контроля привода транспортного средства. Блок управления, расположенный в силовой электронике, связывается с системами автомобиля высокого уровня. В автомобилях спрос на программное обеспечение стремительно растет. Приводными блоками необходимо управлять таким образом, чтобы обеспечить максимально возможную эффективность. Однако, поскольку инвертор имеет ограничение, зависящее от его мощности, задачей управляющего программного обеспечения является достижение этого предела, чтобы полностью использовать потенциал и обеспечить максимальную производительность.
Эффективность систем электропривода в огромной степени зависит от достижений в программном управлении. Требуется высокая точность регистрации токов, напряжений и температур. В конце концов, программное обеспечение для точного управления уменьшает количество оборудования и материалов, необходимых для автомобиля.
Алгоритмы используются для оптимизации диапазона, всегда определяя наиболее эффективные характеристики вождения. Высококачественный дизайн программного обеспечения имеет важное значение. Начиная с этапа разработки, модели должны иметь возможность подробно представлять все желаемые программные функции и учитывать их на ранней стадии.
На технологии управления возлагаются все большие надежды в отношении безопасности. Нужны функции мониторинга и защиты, которые быстро выявляют неисправности автомобиля и оперативно их устраняют. Своевременное отключение питания при обнаружении неожиданного, непреднамеренного ускорения или включение тормоза, если транспортное средство ускоряется слишком быстро и теряет управление, — это лишь некоторые примеры таких функций. Все эти функции гарантируют, что потребители будут больше доверять электромобилям, тем самым ускоряя постепенное внедрение электромобилей.
Все эти функции гарантируют, что потребители будут больше доверять электромобилям, тем самым ускоряя постепенное внедрение электромобилей.
Всеобъемлющая цель инженеров состоит в том, чтобы исключить как можно больше оборудования и воспроизвести функциональность программного обеспечения без ущерба для качества, чтобы добиться большей экономической эффективности и функциональности для клиентов. Разработчики программного обеспечения и приложений с системным подходом и сильным ноу-хау незаменимы для реализации желаемых функций в различных концепциях транспортных средств.
Интегрированный системный подход к ЭБУ обеспечивает высокий уровень многофункциональности
Многофункциональность востребована в автомобильной промышленности и в значительной степени связана с электроприводами. В зависимости от индивидуальных предпочтений производители могут выбирать из широкого спектра архитектур и вариантов конфигурации. Преимуществом интегрированного системного подхода EDU является возможность быстрой, незначительной корректировки и адаптации.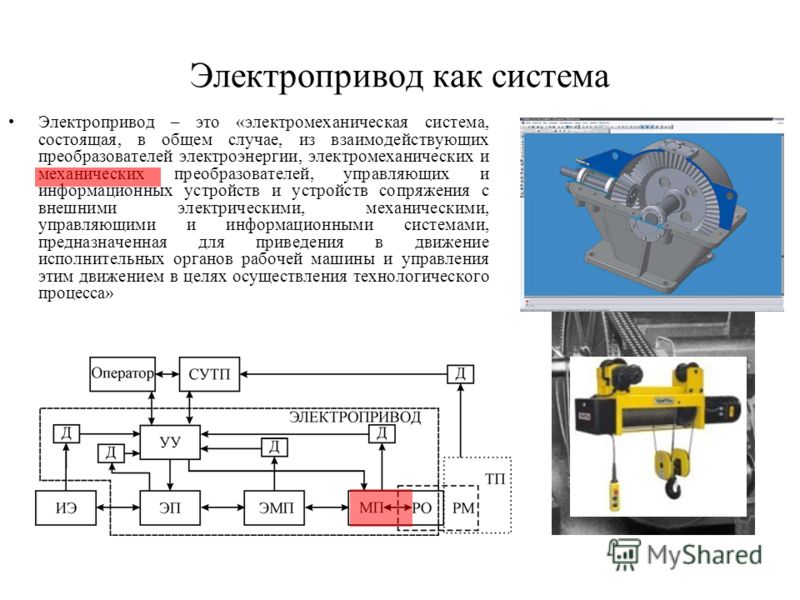
Существующие варианты мощности E-motor и PEU предлагают большую гибкость в качестве элементов EDU и могут быть сконфигурированы для различных уровней мощности. Это сводит к минимуму сложности и затраты на разработку и позволяет производителям внедрять желаемые решения в концепции своих автомобилей в короткие сроки, что позволяет как можно быстрее вывести их на дорогу.
Большинство электроприводов различаются по своему оборудованию, тогда как наше управляющее программное обеспечение является гибким и может работать со всеми EDU независимо от их диапазона мощности благодаря своей гибкой конфигурации.
Наиболее популярные варианты EDU – характеристики и возможности применения
Все наши варианты EDU имеют компактную конструкцию. Электроприводы различаются мощностью, крутящим моментом, передаточными числами. Они могут вместить все, от систем 12 В до высоких категорий мощности до 300 / 400 / 500 кВт. В зависимости от используемых электрических машин они развивают крутящий момент разной степени от 220 Нм до 300 Нм, до 450 Нм и более. Эти характеристики EDU зависят от требований к транспортному средству, веса, размера и доступного места для установки — для внедорожников требуется более крупный электропривод, чем для небольших автомобилей. Будь то коаксиальные, аксиально-параллельные или двойно-аксиально-параллельные, с разъединительной муфтой или без нее, трансмиссия hofer предлагает эти решения как стандартные решения, так и индивидуальные высокопроизводительные универсальные решения.
Эти характеристики EDU зависят от требований к транспортному средству, веса, размера и доступного места для установки — для внедорожников требуется более крупный электропривод, чем для небольших автомобилей. Будь то коаксиальные, аксиально-параллельные или двойно-аксиально-параллельные, с разъединительной муфтой или без нее, трансмиссия hofer предлагает эти решения как стандартные решения, так и индивидуальные высокопроизводительные универсальные решения.
В следующем разделе этой серии статей EDU мы представим наиболее популярные приводы вместе с их техническими параметрами. Мы проливаем свет на интересные сценарии применения EDU на рынке и знакомимся с последними разработками команд разработчиков силовых агрегатов hofer.
Хотите узнать, как наши клиенты достигают максимальной эффективности с помощью стандартизированных и индивидуальных решений для электропривода в своих автомобилях? Оставайтесь с нами, и пусть ваши коллеги тоже получат пользу от наших Недель электрификации. Зарегистрируйтесь здесь, чтобы получать эксклюзивную экспертную информацию.
Зарегистрируйтесь здесь, чтобы получать эксклюзивную экспертную информацию.
Что такое электрический привод? Типы, преимущества, недостатки
Электрический привод определяется как электронное устройство, предназначенное для управления определенными параметрами двигателя для преобразования электрической энергии в механическую энергию точным контролируемым способом.
Содержание
- Блок-схема электропривода
- Типы электроприводов
- На основе поставки
- Электроприводы переменного тока
- Приводы с двигателями постоянного тока
- На основе количества двигателей
- Индивидуальные
- Многодвигательные
- Групповой привод
- На основе скорости 1
- 9 Привод с постоянной скоростью2
- На основе поставки
- На основе контрольных параметров
- Привод с векторным управлением
- Привод с постоянной мощностью
- Привод с постоянным крутящим моментом
Электроэнергетические системы, используемые для управления движением, называются « Электрические приводы ».
Состоит из сложной электронной системы или комбинации различных систем для управления движением.
Движение обеспечивается с помощью первичных двигателей.
Примерами первичных двигателей являются бензиновые двигатели, дизельные двигатели, газовые или паровые турбины, паровые двигатели, гидравлические двигатели и электрические двигатели.
Приводы Энергетические системы, использующие электродвигатели, известны как электроприводы.
Блок-схема электропривода
Современный электропривод с переменной регулируемой скоростью состоит из некоторых важных частей, как показано на блок-схеме ниже.
Источник: Источник может быть источником постоянного или переменного тока.
Преобразователь мощности: Преобразователи переменного тока в постоянный, переменного в переменный, постоянного в постоянный, постоянного в переменный.
Двигатель: Преобразует электрическую энергию в механическую, является сердцем электрической системы.
Обычно используются следующие двигатели:
- . Двигатели постоянного тока – последовательные, параллельные/шунтирующие двигатели постоянного тока, составные двигатели постоянного тока и двигатели постоянного тока с постоянными магнитами.
- Асинхронные двигатели с фазным ротором и линейные, с короткозамкнутым ротором.
- Бесщеточные двигатели постоянного тока
- Шаговые двигатели.
Загрузка: Это может быть машина для выполнения заданной задачи. Пример: Насос, Вентилятор, Станки.
Контроллер: Мощность , необходимая для двигателя, обеспечивается контроллером.
Датчик: В зависимости от требуемого типа управления, поступают различные данные от датчиков. Примером является скорость, ток.
Типы электроприводов
На основе поставки
В этой категории доступны два типа. Это
Приводы двигателей переменного тока
Привод переменного тока — это устройство, используемое для управления скоростью электродвигателя, такого как трехфазный асинхронный двигатель, путем изменения частоты электропитания двигателя.
Привод переменного тока также называется частотно-регулируемым приводом (VFD) или частотно-регулируемым приводом (VSD).
Электроприводы постоянного тока
В основном это система управления скоростью электродвигателя постоянного тока, которая подает напряжение на двигатель для работы с заданной скоростью.
Приводы постоянного тока классифицируются как аналоговые приводы постоянного тока и цифровые приводы постоянного тока.
Цифровой привод постоянного тока обеспечивает точное управление.
В зависимости от количества двигателей
В этой категории доступны три типа. их
Индивидуальный
Для различных частей машины будет отдельный приводной двигатель.
Пример: токарный станок.
Мультидвигатель
Для приведения в действие различных частей машины предусмотрены отдельные двигатели.
Пример: Краны.
Групповой привод
В групповом приводе один двигатель используется как привод для двух или нескольких машин.
Двигатель соединен одним валом, другие машины соединены с валом ремнями и шкивами.
Групповой привод наиболее экономичен.
В зависимости от скорости
В этой категории доступны два типа. Это
Привод с постоянной скоростью
Для станков требуются приводы с более или менее постоянной скоростью, используются асинхронный двигатель с короткозамкнутым ротором и ручное управление.
Привод с регулируемой скоростью
Основное назначение привода с регулируемой скоростью — управление скоростью наряду с ускорением, замедлением, крутящим моментом и, наконец, направлением движения машины.
Используются для снижения энергопотребления.
На основе параметров управления
В этой категории доступно три типа. Это
Привод с векторным управлением
Векторное управление является наиболее точным, чем любой другой тип частотно-регулируемого привода (ЧРП).
В этом режиме управления крутящий момент и скорость управляются инвертором с помощью широтно-импульсной модуляции (ШИМ).![]()
Используются для синхронных и асинхронных двигателей переменного тока.
Привод с постоянной мощностью
Когда двигатель при номинальном токе якоря обеспечивает постоянную мощность на всех скоростях в определенном диапазоне управления скоростью, это называется приводом с постоянной мощностью в этом диапазоне управления скоростью.
Привод с постоянным крутящим моментом
Привод с постоянным крутящим моментом и нагрузкой отличается при работе с фиксированными объемами.
Примерами являются винтовые компрессоры, питатели и конвейеры.
Преимущества электрических приводов
- Достаточная перегрузочная способность без потери срока службы машины.
- Работа в четырех квадрантах.
- Изменяемая характеристика крутящий момент-скорость.
- Период прогрева не требуется.
- Более высокая эффективность.
- Простое управление.
- Чистая работа, отсутствие загрязнения.
- Широкий диапазон скорости управление.
- Имеют гибкие характеристики управления.
- Может использоваться электрическое торможение
- Электроприводы могут быть оснащены системами автоматического обнаружения неисправностей.
- Электродвигатели имеют долгий срок службы, низкий уровень шума, более низкие требования к техническому обслуживанию и более чистую работу.
- Пригодны практически для условий эксплуатации, таких как взрывоопасные и радиоактивные среды, погружение в жидкости и т. д.
- Они могут быть запущены мгновенно и сразу же могут быть полностью загружены.

Недостатки электрических приводов
- Высокая начальная стоимость из-за наличия силовых преобразователей и управляющей электроники.
- Требуется регулярное обслуживание и повышенное внимание.
Применение электрических приводов
Широко используется в
- Промышленном производстве,
- производстве и
- управлении процессами.

