Содержание
Клапаны управления подъёмом — Клапаны управления подъёмом
- Обзор товара
Мы изготавливаем специальные конструкции, которые на 100% соответствуют требованиям наших клиентов с учетом особенностей и функций тракторов каждого производителя.
Наши регулирующие клапаны гидравлического подъемника с давлением до 250 бар и расходом от 5 до 100 л/мин предлагаются нашим клиентам с использованием универсальных методов проектирования.
Гидравлические подъёмники должны иметь возможность управлять скоростью спуска оборудования с помощью позиционного управления, регулирования тяги, смешанного управления, при котором оба они применяются одновременно, и функций поплавка. Это компонент, регулирующий клапан гидравлического подъемника, который направляет масло, циркулирующее в гидравлической системе трактора, в цилиндр, в бак или удерживает масло в цилиндре для последующего его использования в необходимых функциях.
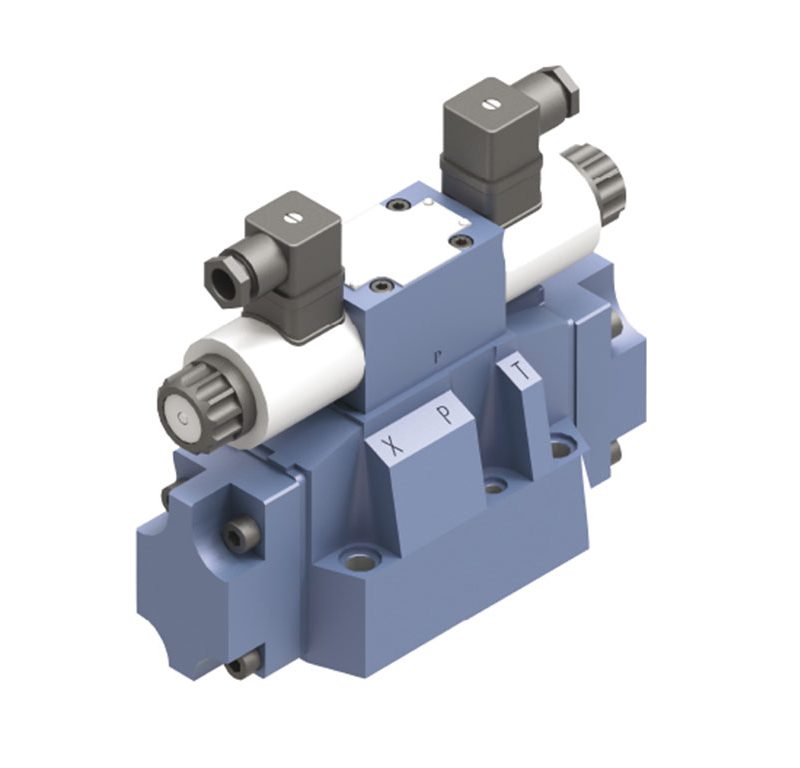
Клапан управления подъемом представляет собой клапан регулирования давления и потока, включающий главный золотник, клапан опускания, предохранительный клапан, клапан управления потоком и обратный клапан в одном корпусе с максимально компактной конструкцией. Клапан обеспечивает необходимое давление и постоянную скорость потока к поршню гидроподъемника независимо от скорости потока на входе (оборотов двигателя).
Клапан обеспечивает необходимое давление и постоянную скорость потока к поршню гидроподъемника независимо от скорости потока на входе (оборотов двигателя).
Конструкция электрического автолифта
Возможна активация механизма гидроподъемника с электрическим сигналом с помощью системы автолифта, которая предназначена для совместной работы с регулирующими клапанами
Конструкция с системой определения нагрузки
Используя систему определения нагрузки, гидравлический подъемник и мобильный регулирующий клапан может использоваться одновременно с приоритетом гидравлического подъемника.
Компактная конструкция
Компактная конструкция достигается за счет объединения компонентов механизма с другими функциями на одном корпусе клапана.
Электрогидравлическая конструкция
Электрогидравлический регулирующий клапан предназначен для выполнения функций подъема и опускания с помощью пропорциональных электромагнитных клапанов.
Закрытая центрированная конструкция
Это закрытая центрированная конструкция, которая может работать при высоком давлении и особенно используется на строительных машинах.
Гибкая конструкция
Секции гидрораспределителя укладываются непосредственно в блок регулирующих клапанов, что обеспечивает гибкость конструкции.
Простая конструкция
Функции регулирующего клапана поддерживаются на должном уровне в соответствии с требованиями заказчика, а ненужные части удалены. Таким образом получается конструкция с низким уровнем отказов и высокой производительностью.
| Модель | Гидравлическая система | Макс. рабочее давление | Макс. пропускная способность (л/мин) | Давление предохранительного клапана (бар) | Сброс давления | Наличие спускного клапана |
| KV350 | Открытая цепь | 200 | 35 | — | — | — |
| KV400 | Открытая цепь | 200 | 45 | — | — | — |
| KV450 | Открытая цепь | 200 | 70 | — | 230±5 | + |
| KV500 | Открытая цепь | 200 | 75 | — | — | — |
| KV500-Manifold | Закрытая цепь | 200 | 75 | 195±5 | 235±5 | + |
| KV600 | Закрытая цепь | 200 | 80 | 195±5 | 240±5 | + |
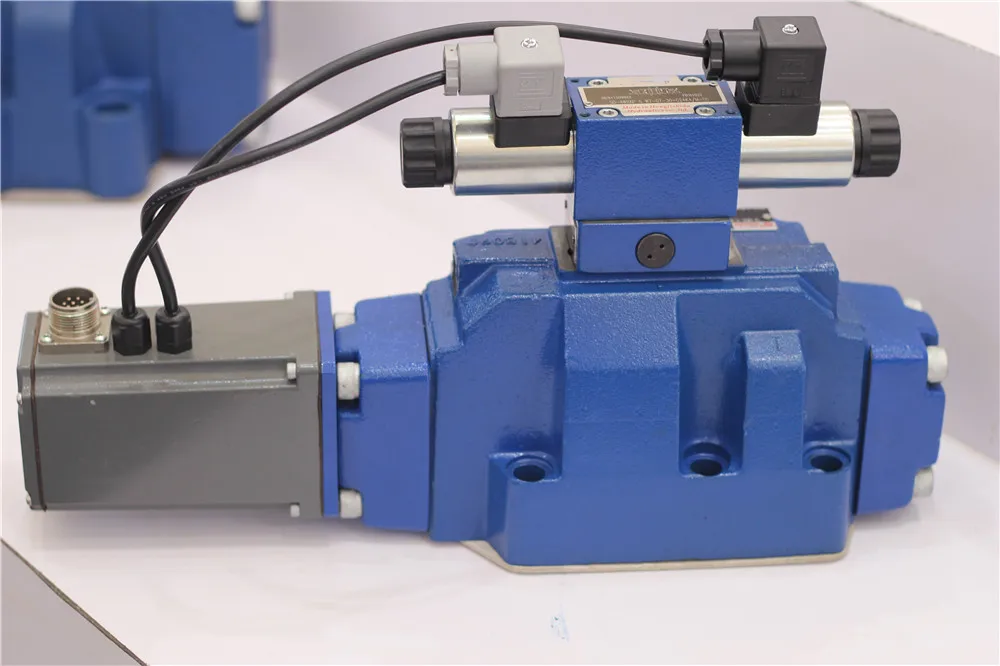
Электрогидравлический клапан
Электрогидравлический клапан предназначен для автоматического регулирования потоков жидкостей, газов или пара, исключающего возможность выхода его из строя из-за коррозии и поломки пружины мембрано-пружиного механизма, а также перегорания катушки электромагнита. Технический результат достигается тем, что внутри управляющих запорных органов установлены эластичные мембраны с возможностью регулирования свободного хода положением торцевых концов штоков, перемещаемых посредством электромагнитов управляющих запорных органов, при этом возвратная пружина основного запорного органа расположена в его подмембранной полости, отделенной от рабочей полости сальниковым уплотнением. 1 ил.
Технический результат достигается тем, что внутри управляющих запорных органов установлены эластичные мембраны с возможностью регулирования свободного хода положением торцевых концов штоков, перемещаемых посредством электромагнитов управляющих запорных органов, при этом возвратная пружина основного запорного органа расположена в его подмембранной полости, отделенной от рабочей полости сальниковым уплотнением. 1 ил.
Полезная модель относится к регулирующим устройствам с мембранно-пружинным исполнительным механизмом, снабженных электрогидравлическим приводом и может быть использована для работы в качестве исполнительного устройства в системах автоматического регулирования потоков жидкости, газов или пара.
Главной проблемой всех известных в настоящее время технических решений, предназначенных для автоматического регулирования потоков жидкостей, газов или пара является их низкая надежность в следствии коррозии и поломки пружины мембрано-пружиного механизма, а также из-за перегорания катушки электромагнита. В случае применения электрогидравлического клапана для регулирования потоков жидкости, газов и пара на техногенно-опасных объектах, выход их из строя может привести к крупным техническим, техногенным и экологическим авариям и катастрофам (например, если электрогидравлический клапан используется для регулирования потоков в атомной установке).
В случае применения электрогидравлического клапана для регулирования потоков жидкости, газов и пара на техногенно-опасных объектах, выход их из строя может привести к крупным техническим, техногенным и экологическим авариям и катастрофам (например, если электрогидравлический клапан используется для регулирования потоков в атомной установке).
Известны различные клапаны с электромагнитным управлением, содержащие управляющую полость, электромагнит, якорь, седло, корпус (Эдельман А.И. Топливные клапаны жидкостных ракетных двигателей. М. 1970, с.67-70).
Известны также конструкции клапанов с электромагнитным управлением, состоящие из электромагнита, якоря, мембраны, седла, корпуса, пружины и содержащие полости управляющего и высокого давления, загрузочные и перепускные каналы. Принцип действия этих клапанов основан на преобразовании электрической энергии в механическую энергию перемещения якоря в вспомогательном клапане, который одновременно является вспомогательным клапаном. Вспомогательный клапан управляет работой основного клапана путем регулирования давления в управляющей полости. Из-за изменения давления в управляющей полости, отделенной от полости высокого давления мембраной, создается усилие, перемещающее мембрану.
Из-за изменения давления в управляющей полости, отделенной от полости высокого давления мембраной, создается усилие, перемещающее мембрану.
В зависимости от перепада давления на мембране клапан или открывается или закрывается. Повышение давления в управляющей полости осуществляется через загрузочный канал, соединяющий ее с полостью высокого давления. Понижение давления в управляющей полости осуществляется через перепускной канал, соединяющий ее с выходной магистралью (Ротенберг А.Г. Маршов В.М. Кобулашвили Ш.Н. Новые приборы автоматики и контроля в холодильной промышленности. М. 1981).
Известен мембранный клапан, содержащий корпус с входным, выходным отверстием и седлом, соединенный со штоком запорный орган в виде золотника, электромагнитный (импульсный) привод возвратно-поступательного движения движителя (в виде шпинделя), который связан через мембрану (упругий непроницаемый для рабочей среды элемент) со штоком (см. Гуревич Д.Ф. и др. Арматура атомных электростанций. — М.:Энергоиздат, 1982, с. 113, фиг.3.21). Мембрана работает аналогично сильфону и обеспечивает абсолютную герметичность корпуса от движителя.
113, фиг.3.21). Мембрана работает аналогично сильфону и обеспечивает абсолютную герметичность корпуса от движителя.
Недостатком устройства является малый ход рабочего органа — золотника из-за ограниченного хода мембраны, для увеличения которого необходимо увеличение диаметра мембраны, что приводит к увеличению габаритов изделия, что ограничивает применение для больших Ду и Ру (условных диаметров и давлений).
Наиболее близким по конструкции является электромагнитный клапан (Авторское свидетельство СССР 1106947, Кл. F16К 31/02, опубликовано 07.08.1084, Бюл. 29), в рабочей полости корпуса которого с входным и выходным патрубками установлен основной запорный орган, связанный через шток с мембраной и имеющий загрузочное отверстие, соединяющее входной патрубок с надмембранной полостью, и разгрузочное отверстие, перекрываемое управляющим запорным органом, управляемым с помощью электромагнита, отличающийся тем, что, с целью повышения надежности, в подмембранной полости между мембраной и запорным органом размещена перегородка со сквозным отверстием, соединяющим входную и подмембранную полости, в корпусе выполнен канал, соединяющий подмембранную полость с дренажом, а клапан снабжен дополнительным управляющим запорным органом с электромагнитным приводом, перекрывающим канал.
Первым недостатком прототипа является то, что существует возможность попадания жидкости в полость катушки электромагнита через сальниковое уплотнение управляющего запорного органа, так как он постоянно находиться под напором жидкости поступающей через сквозное отверстие перегородки, соединяющее входную и подмембранную полость.
Вторым недостатком является возможность работы устройства только при использовании жидкостей определенной чистоты и вязкости, так как в противном случае возникает опасность засорения сквозных отверстий, через которые жидкость воздействует на мембрану, что приведет к выходу из строя клапана.
Третьим недостатком является отсутствие возможности регулирования потока жидкости, газа и пара проходящего через клапан, что делает невозможным использования данного устройства в автоматических системах регулирования.
Четвертый недостаток состоит в том, что возвратная пружина основного запорного органа постоянно находится в воде и ржавеет, теряя свои свойства.
Пятым недостатком прототипа является необходимость постоянной подачи напряжения на электромагнитный привод дополнительного запорного органа для удержания клапана в открытом состоянии, что приводит к перегреву катушки электромагнита и снижению надежности работы клапана.
Общим признаком с прототипом является то, что электрогидравлический клапан содержит корпус с входными и выходными патрубками, в рабочей полости которого установлен основной запорный орган с возвратной пружиной, связанный через шток с рабочей мембраной, положение которой управляется изменением положений управляющих запорных органов, имеющих самостоятельные электромагнитные приводы
Решаемая полезной моделью задача — создание электрогидравлического клапана, предназначенного для автоматического регулирования потоков жидкостей, газов или пара, исключающего возможность выхода его из строя из-за коррозии и поломки пружины мембрано-пружиного механизма, а также перегорания катушки электромагнита. Технический результат заключается в повышении надежности электрогидравлического клапана.
Технический результат достигается тем, что внутри управляющих запорных органов установлены эластичные мембраны с возможностью регулирования свободного хода положением торцевых концов штоков, перемещаемых посредством электромагнитов управляющих запорных органов, при этом возвратная пружина основного запорного органа расположена в его подмембранной полости, отделенной от рабочей полости сальниковым уплотнением.
Повышение надежности заключается в том, что совокупность новых элементов в предлагаемом техническом решении конструкции управляющих запорных клапанов, выполненых в виде эластичных мембран, свободный ход которых регулируется положением торцевых концов штоков, приводимых в движение электромагнитами управляющих запорных органов, позволяет отказаться от сальникового уплотнения, через которое возможна утечка воды, и как следствие, перегорание катушки электромагнита и самопроизвольная разрегулировка реле.
Кроме того, расположение возвратной пружины основного запорного органа в его подмембранной полости, отделенной от рабочей полости сальниковым уплотнением обеспечивает работу возвратной пружины в условиях без коррозии, что также приводит к повышению надежности электрогидравлического клапана в целом.
Полезная модель поясняется чертежами.
На фиг.1 представлен электрогидравлический клапан.
В корпусе электрогидравлического клапана 1 с входным 2 и выходным 3 патрубками установлены: основной запорный орган 4, сальниковое уплотнение 5, шток 6, возвратная пружина 7, гидрокамера 8 с рабочей мембраной 9, горизонтальный клапан 10, круглые стойки 11 и управляющие запорные органы 12.
Управляющие запорные органы 12 содержат внутри эластичные мембраны 13, свободный ход которых регулируется положением торцевых концов штоков 14, приводимых в движение электромагнитами 15 и возвратными пружинами 16.
Возвратная пружина 7 основного запорного органа 4 расположена в его подмембранной полости 17, отделенной от рабочей полости 18 сальниковым уплотнением 5.
Круглые стойки 11 имеют плоские торцы 19 с наружной резьбой и по два вертикальных канала 20 и 21, перекрываемых эластичными мембранами 13.
Горизонтальный клапан 10 соединен с гидрокамерой 8 посредством штуцера 22.
Электрогидравлический клапан работает следующим образом.
При включении левого электромагнита 15 поднимается шток 14, преодолевая сопротивление возвратной пружины 16, при этом эластичная мембрана 13 прогибается вверх под давлением воды, поступающей из напорной магистрали по вертикальному каналу 20 круглой стойки 11, и вода из канала 20 поступает во второй вертикальный канал 21 и далее через штуцер 22 попадает в гидрокамеру 8 и давит на мембрану 9. Создаваемое в гидрокамере 8 давление постепенно преодолевает усилие упругости пружины 7 и шток 6 начинает перемещать медленно вниз основной запорный орган 4. Клапан открывается.
При отключении катушки левого электромагнита 15 движение основного запорного органа 4 прекращается и его положение фиксируется благодаря замкнутому объему воды в гидрокамере 8.
В режиме автоматического регулирования электронный регулятор (на чертеже не показан) включает катушку левого электромагнита 15 короткими паузами и вода в гидрокамеру 8 попадает малыми порциями.
Движение основного запорного органа 4 в противоположную сторону происходит под действием возвратной пружины 7, когда на катушку правого электромагнита 15 подано напряжение, а катушка левого электромагнита 15 отключена.
При включении правого электромагнита 15 правый шток 14 поднимается вверх, освобождает эластичную мембрану 13 и вода из гидрокамеры 8 под действием давления от рабочей мембраны 9 и возвратной пружины 7 поступает по штуцеру 22 и каналу 21 правой круглой стойки 11 к эластичной мембране 13, прогибает ее и по каналу 20 медленно выталкивается в сливную магистраль. Клапан закрывается.
Предложенная конструкция клапана устраняет недостатки, которые имеются у прототипа.
Во-первых, эластичная мембрана, прижатая буртами кронштейна к стойке, создает полную герметизацию и устраняет утечки воды наружу.
Во-вторых, полностью устраняет перегрузки электромагнита, так как вследствие вышеуказанной герметизации отпадает необходимость в уплотнении штока, которое в прототипе создавало перегрузки электромагнита за счет сил трения штока об уплотнение.
В третьих, полностью устраняется самопроизвольное разрегулирование электрогидрореле в течение всего срока эксплуатации, которое раньше возникало из-за износа сальникового уплотнения штока.
В четвертых, возвратные пружины электрогидрореле теперь не ржавеют и имеют удобный доступ для осмотра, так как вынесены из воды наружу.
Таким образом, предлагаемый электрогидравлический клапан позволяет обеспечить повышение его надежности его работы.
Электрогидравлический клапан, в рабочей полости корпуса которого с входным и выходным патрубками установлен основной запорный орган с возвратной пружиной, связанный через шток с рабочей мембраной, положение которой управляется изменением состояния управляющих запорных органов, имеющих самостоятельные электромагнитные приводы, отличающийся тем, что внутри управляющих запорных органов установлены эластичные мембраны с возможностью регулирования свободного хода положением торцевых концов штоков, перемещаемых посредством электромагнитов управляющих запорных органов, при этом возвратная пружина основного запорного органа расположена в его подмембранной полости, отделенной от рабочей полости сальниковым уплотнением.
Royal Hydraulics — электрогидравлические клапаны
Поставщик | Электрогидравлические клапаны | Описание | |||||
Пропорциональные регулирующие клапаны PowrFlow™ со встроенной электроникой
. Опции и аксессуары
| Электрогидравлические пропорциональные и сервоуправления PowrFlow™ Бортовые электрогидравлические изделия | ||||||
| Электрогидравлические пропорциональные предохранительные клапаны Предохранительные клапаны с ручным управлением позволяют просто регулировать максимальное давление.  Модели с электрическим управлением вентиляцией доступны в конфигурациях «нормально открытый» или «нормально закрытый». Модели с электрическим управлением вентиляцией доступны в конфигурациях «нормально открытый» или «нормально закрытый». Электрогидравлические модели обеспечивают дистанционное управление для бесступенчатой регулировки давления вплоть до максимального. H8819 СЕРИЯ 50 галлонов в минуту при 15 000 фунтов на квадратный дюйм (190 л/мин. при 1040 бар) 75 галлонов в минуту при 9000 фунтов на кв. дюйм (284 л/мин при 620 бар) | Серия H8819 | ||||||
Электрогидравлические дистанционные пропорциональные приводы Дистанционный пропорциональный привод (RPA) СЕРИЯ СА 1200 фунтов (5,33 кН) Выходная сила | Серия СА | ||||||
Электрогидравлические клапаны Особенности:
Типы:
| Электрогидравлические клапаны | ||||||

Клапаны электрогидравлические | Power & Motion
Чтобы схематически обозначить пропорциональный клапан, знакомый символ цифрового направляющего клапана на приведенном выше рисунке дополнен двумя прямыми внешними линиями за пределами корпуса клапана, которые проходят параллельно длинной оси клапана. Эти дополнительные линии указывают на то, что золотник может занимать и сохранять любое промежуточное положение на всем диапазоне хода золотника.
Эти дополнительные линии указывают на то, что золотник может занимать и сохранять любое промежуточное положение на всем диапазоне хода золотника.
Клапаны с высокими эксплуатационными характеристиками обычно классифицируются как сервоприводные или пропорциональные, что указывает на ожидаемую производительность. К сожалению, эта классификация имеет тенденцию обобщать и стирать истинные различия между различными типами клапанов. Выбор зависит от области применения, и каждый клапан имеет свои преимущества, когда речь идет о контроле давления или расхода.
Традиционно термин «сервоклапан» описывает клапаны, которые используют управление с обратной связью. Они контролируют и передают информацию о положении золотника основной ступени пилотной ступени или драйверу либо механически, либо электронным способом. Пропорциональные клапаны, с другой стороны, перемещают золотник главной ступени прямо пропорционально командному сигналу, но они обычно не имеют никаких средств автоматической коррекции ошибок (обратной связи) внутри клапана.
Часто возникает путаница, когда конструкция клапана напоминает пропорциональный клапан, но наличие датчика обратной связи о положении золотника (обычно LVDT) повышает его производительность до уровня сервоклапана. Это подтверждает идею о том, что разработчики и поставщики должны использовать общую терминологию и сосредоточиться на требованиях к производительности конкретного приложения.
Как правило, пропорциональные клапаны используют один или два пропорциональных соленоида для перемещения золотника, прижимая его к набору уравновешенных пружин. Результирующее смещение золотника пропорционально току, управляющему соленоидами. Пружины также центрируют катушку главной сцены. Повторяемость положения золотника основной ступени зависит от симметрии пружин и способности конструкции минимизировать нелинейные эффекты гистерезиса пружины, трения и отклонений допусков на обработку.
Сервоклапаны
Рис. 1. Конфигурации первой ступени для заслонки сопла и струйных клапанов.
Термин «сервоклапан» традиционно наводит инженеров на мысль о механических клапанах с обратной связью, в которых пружинный элемент (провод обратной связи) соединяет моментный двигатель с золотником главной ступени. Смещение катушки приводит к тому, что проволока передает крутящий момент двигателю пилотной ступени. Катушка будет удерживать положение, когда крутящий момент от отклонения провода обратной связи сравняется с крутящим моментом от электромагнитного поля, индуцированного током через катушку двигателя. Эти двухступенчатые клапаны содержат пилотную ступень или моментный двигатель, а также основную или вторую ступень. Иногда главную ступень называют силовой. Эти клапаны можно разделить в основном на два типа: заслонка сопла и струйная трубка, рис. 1.9.0003
Электромагнитная цепь заслонки сопла или моментного двигателя со струйной трубкой практически одинакова. Различия между ними заключаются в конструкции гидравлического моста. Гидравлический мост управляет пилотным потоком, который, в свою очередь, управляет движением золотника основной ступени. В заслонке сопла крутящий момент, создаваемый магнитным полем на якоре, перемещает заслонку в сторону любого сопла в зависимости от полярности командного сигнала. Смещение заслонки вызывает дисбаланс давления на концах золотника, который перемещает золотник. В струйной трубе движение якоря отклоняет струйную трубу и асимметрично подает жидкость между концами золотника через приемник струи. Этот дисбаланс давления сохраняется до тех пор, пока провод обратной связи не вернет струйную трубу или заслонку в нейтральное положение.
В заслонке сопла крутящий момент, создаваемый магнитным полем на якоре, перемещает заслонку в сторону любого сопла в зависимости от полярности командного сигнала. Смещение заслонки вызывает дисбаланс давления на концах золотника, который перемещает золотник. В струйной трубе движение якоря отклоняет струйную трубу и асимметрично подает жидкость между концами золотника через приемник струи. Этот дисбаланс давления сохраняется до тех пор, пока провод обратной связи не вернет струйную трубу или заслонку в нейтральное положение.
Исторически сложилось так, что сервоклапаны со струйной трубкой и сопло-заслонка конкурировали для аналогичных применений, требующих высокой динамики. Как правило, лучшая динамика первой ступени дает лучшую общую реакцию заслонки сопла, в то время как улучшенное восстановление давления конструкции моста струи/ресивера дает двигателям со струйной трубкой более высокие движущие силы золотника (способность срезать стружку). Оба клапана требуют малых токов управления и, следовательно, имеют большое механическое преимущество. Ток двигателя для клапанов этого типа обычно составляет менее 50,0 мА. Обратите внимание, что эти сервоклапаны также являются пропорциональными клапанами, поскольку смещение золотника и расход прямо пропорциональны входной команде.
Ток двигателя для клапанов этого типа обычно составляет менее 50,0 мА. Обратите внимание, что эти сервоклапаны также являются пропорциональными клапанами, поскольку смещение золотника и расход прямо пропорциональны входной команде.
Клапаны с прямым приводом
Рис. 2. Линейный силовой двигатель часто используется для непосредственного привода золотника высокопроизводительных клапанов. Альтернативой является использование одного или двух пропорциональных соленоидов для привода золотника.
Клапаны с прямым приводом, в отличие от двухступенчатых клапанов с гидравлическим управлением, смещают золотник, физически соединяя его с якорем двигателя. Эти клапаны обычно бывают двух основных разновидностей: те, которые приводятся в действие линейными силовыми двигателями (LFM), и те, которые приводятся в действие пропорциональными соленоидами. В рамках этих двух общих классификаций клапаны можно разделить на пропорциональные и сервопропорциональные. Различие основано на использовании датчика положения для обеспечения обратной связи о положении золотника. Сервопропорциональные клапаны должны включать обратную связь по положению золотника с обратной связью для повышения воспроизводимости и точности, необходимых для приложений с высоким уровнем контроля. Как правило, сервопропорциональные клапаны с прямым приводом имеют в целом меньшую динамическую реакцию, чем двухступенчатые клапаны с гидравлическим управлением с такими же характеристиками потока. Обычно это происходит из-за большой массы якоря LFM или соленоида и большой постоянной времени, связанной с катушкой, которая зависит от индукции и сопротивления катушки.
Сервопропорциональные клапаны должны включать обратную связь по положению золотника с обратной связью для повышения воспроизводимости и точности, необходимых для приложений с высоким уровнем контроля. Как правило, сервопропорциональные клапаны с прямым приводом имеют в целом меньшую динамическую реакцию, чем двухступенчатые клапаны с гидравлическим управлением с такими же характеристиками потока. Обычно это происходит из-за большой массы якоря LFM или соленоида и большой постоянной времени, связанной с катушкой, которая зависит от индукции и сопротивления катушки.
В отличие от сервоприводов с гидравлическим управлением, производительность клапана с прямым приводом не зависит от изменения давления подачи. Это делает их идеальными для применений, где пилотный поток для работы первой ступени недоступен. Клапаны с прямым приводом также, как правило, нечувствительны к вязкости, тогда как клапаны с форсунками и струйными трубками лучше всего работают с вязкостью масла ниже 6000 SUS. Однако большинство клапанов с прямым приводом не могут генерировать большие движущие силы золотника, как их аналоги с гидравлическим управлением.
Однако большинство клапанов с прямым приводом не могут генерировать большие движущие силы золотника, как их аналоги с гидравлическим управлением.
Подобно моментному двигателю, используемому в сервоприводах заслонки сопла/струйной трубы, LFM допускает двунаправленное движение за счет добавления в конструкцию постоянных магнитов, что делает движение якоря чувствительным к полярности команд. На выходе LFM должен преодолевать силу пружины, а также силы внешнего потока и силы трения. Однако во время обратного хода в центральное положение пружина обеспечивает дополнительное усилие привода золотника, что делает клапан менее чувствительным к загрязнению. Силы магнитного поля уравновешиваются двунаправленной пружиной, которая позволяет шпуле оставаться в центре без расхода энергии.
В отличие от LFM, пропорциональный соленоид является однонаправленным устройством. Два соленоида противостоят друг другу, чтобы достичь центрированного, обесточенного, безопасного положения. Когда используется один соленоид, для удержания золотника в середине хода требуется непрерывный ток, чтобы уравновесить нагрузку, создаваемую возвратной пружиной. Это делает конструкцию менее энергоэффективной, чем ее аналог LFM или двойной соленоид. Во время потери мощности конструкция LFM и двойного пропорционального соленоида не переходит в нейтральное положение и блокирует поток к нагрузке, то есть к поршню. Когда конструкция с одним соленоидом теряет мощность, золотник должен пройти через открытое положение, что может привести к неконтролируемому перемещению груза.
Это делает конструкцию менее энергоэффективной, чем ее аналог LFM или двойной соленоид. Во время потери мощности конструкция LFM и двойного пропорционального соленоида не переходит в нейтральное положение и блокирует поток к нагрузке, то есть к поршню. Когда конструкция с одним соленоидом теряет мощность, золотник должен пройти через открытое положение, что может привести к неконтролируемому перемещению груза.
Многоступенчатые клапаны
Все вышеупомянутые конструкции могут быть использованы для создания многоступенчатого гидравлического клапана. Подход к каждому дизайну зависит от требований приложения. Обычно большинство проектов не превышает трех этапов. Установка заслонки сопла, струйной трубы или клапана с прямым приводом на основную ступень большего размера удовлетворяет большинству требований к динамике и потоку. Иногда клапан со струйной трубкой используется в многоступенчатой конфигурации, где механическая обратная связь традиционной струйной трубы заменяется электронной обратной связью. Этот тип сервореактивного двигателя имеет пилотные характеристики типичной реактивной трубы. В зависимости от требуемого управления многие многоступенчатые клапаны замыкают контур положения относительно основной ступени с помощью дифференциального преобразователя с линейной переменной. Это устройство контролирует положение катушки. В случае потери гидравлической мощности пружины на противоположных сторонах золотника главной ступени возвращают его в нейтральное положение.
Этот тип сервореактивного двигателя имеет пилотные характеристики типичной реактивной трубы. В зависимости от требуемого управления многие многоступенчатые клапаны замыкают контур положения относительно основной ступени с помощью дифференциального преобразователя с линейной переменной. Это устройство контролирует положение катушки. В случае потери гидравлической мощности пружины на противоположных сторонах золотника главной ступени возвращают его в нейтральное положение.
Конструкция гидравлической системы
Рис. 3. Когда пилотная секция сопла заслонки (а) изображена в схематическом виде, (б), очевидно, что существует мостовая схема. При перемещении заслонки ограничения Ra и Rb изменяются в противоположных направлениях. Это разбалансирует мост и заставит золотник двигаться относительно центрирующих пружин.
Чтобы правильно выбрать гидравлический клапан для конкретного применения, проектировщики должны учитывать конкретное применение и конфигурации системы. Давление подачи, тип жидкости, требования к усилию системы, динамический отклик клапана и резонансная частота нагрузки являются примерами различных факторов, влияющих на работу системы.
Клапаны с гидравлическим управлением чувствительны к колебаниям давления подачи, тогда как на клапаны с прямым приводом изменение давления подачи не влияет. Тип жидкости важен при рассмотрении совместимости уплотнений и влияния вязкости на производительность в диапазоне рабочих температур системы.
Требования к общей силе должны включать все статические и динамические силы, действующие на систему. Силы нагрузки могут помогать или сопротивляться, в зависимости от ориентации и направления нагрузки. Силы, необходимые для преодоления инерции, могут быть большими в высокоскоростных приложениях и имеют решающее значение для выбора размера клапана.
Резонансная частота нагрузки является функцией общей жесткости хода, которая является комбинацией гидравлической и структурной жесткости. Для оптимальных динамических характеристик фазовая точка клапана 90° должна превышать резонансную частоту нагрузки в три или более раз.
Рис. 4. 4-ходовой золотниковый клапан имеет четыре отдельные площадки, которые синхронно изменяются при смещении золотника: две площадки открываются, а две другие закрываются. На схематическом изображении становится ясно, что четыре площадки составляют мостовую схему, и движение золотника разбалансирует мост в ту или иную сторону, вызывая реверсирование потока нагрузки.
На схематическом изображении становится ясно, что четыре площадки составляют мостовую схему, и движение золотника разбалансирует мост в ту или иную сторону, вызывая реверсирование потока нагрузки.
Динамическая характеристика клапана определяется как частота, при которой фазовая задержка между входным током и выходным потоком составляет 90°. Эта точка отставания по фазе на 90° зависит от амплитуды входного сигнала, давления подачи и температуры жидкости, поэтому при сравнении должны использоваться согласованные условия.
Подробный обзор
При рассмотрении основных внутренних частей сервоклапана заслонка-сопло, рис. 3, должно быть ясно, что крутящий момент, приложенный моментным двигателем к рычагу заслонки, скажем, по часовой стрелке, перемещает заслонку ближе к соплу А. и стремится закрыть его.
Одновременно с этим заслонка отходит от сопла B , чтобы пропустить через него больший поток, поэтому конечным результатом является повышение давления P a и падение давления Pb. Разница давлений P a — P b ощущается на двух концах золотника главного клапана, перемещая его вправо и создавая сообщение от порта P к порту B и от порт A в порт T .
Разница давлений P a — P b ощущается на двух концах золотника главного клапана, перемещая его вправо и создавая сообщение от порта P к порту B и от порт A в порт T .
Четырехходовой распределитель показан на рис. 4. Когда золотник клапана перемещается вправо, R p до a и R b до t открываются, а R p до b и Р а по т закрыть. Жидкость поступает из порта A клапана в нагрузку и возвращается через порт B в резервуар. Движение золотника влево открывает R p to b и R a до t так, чтобы жидкость вытекала из клапана B порт к загрузке, возврат в резервуар через A порт.
Клапаны с пилотным управлением
Клапаны с большей пропускной способностью нуждаются в пилотных ступенях для повышения мощности, необходимой для переключения больших золотников. Электромеханические методы, используемые для этой стадии, включают моментные двигатели, силовые двигатели и пропорциональные соленоиды.
Рис. 7. Четыре номинально равных воздушных зазора двигателя с электромагнитным моментом пропускают через каждый равный магнитный поток от постоянных магнитов, создавая нулевой суммарный крутящий момент на якоре. Когда ток входит в катушку, индуцированный катушкой магнитный поток добавляется или вычитается из четырех потоков воздушного зазора, создавая крутящий момент на якоре. Движение якоря обычно вызывает перемещение заслонки, изменяя удельное сопротивление двух сопел.
Моментные двигатели, рис. 7, представляют собой электромеханические роторные машины, чей ход вращения ограничен — часто менее чем одним или двумя оборотами — и почти всегда используются для функции пилотирования. Они оснащены постоянными магнитами в качестве основного источника магнитного потока, а пути магнитного потока образуют силовой мост. Их ограниченное вращение позволяет устанавливать якорь на жесткой гибкой пружине, а не на подшипниках, хотя есть одно известное фирменное исключение, в котором используется мягкая пружина. Жесткая пружина и отсутствие подшипников практически устраняют гистерезис, вызванный сужением подшипников.
Жесткая пружина и отсутствие подшипников практически устраняют гистерезис, вызванный сужением подшипников.
Рис. 8. Генеалогическое древо электромеханических интерфейсов моментного двигателя показывает все распространенные методы управления, используемые в настоящее время в промышленности.
Входящий ток создает второй набор магнитных потоков, которые разбалансируют силовой мост и приводят к чистому крутящему моменту. Крутящий момент вызывает угловое вращение до тех пор, пока крутящий момент, вызванный потоком, не сравняется с противодействующим крутящим моментом изгибающейся пружины плюс любая внешняя нагрузка. Важной характеристикой моментного двигателя является то, что на направление вращения влияет направление тока через катушку. Электромагнитное поле, вызванное током, сравнивается с полем постоянного магнита в магнитной мостовой схеме, и происходит вращение в соразмерном направлении.
В последнем узле клапана якорь моментного двигателя соединяется с заслонкой, расположенной между двумя противоположными соплами, струйной трубой или качающейся трубкой или лопастью. Последние два управляют потоком жидкости, фиг.8, ответвление B . Основные принципы работы и принципиальная конструкция сервоклапанов со створкой и струйной трубкой показаны на рисунках 9 и 10 соответственно. Моментные двигатели почти исключительно управляют сервоклапанами, и обычно для полной работы требуется менее одного ватта мощности, хотя это не является жестким правилом.
Последние два управляют потоком жидкости, фиг.8, ответвление B . Основные принципы работы и принципиальная конструкция сервоклапанов со створкой и струйной трубкой показаны на рисунках 9 и 10 соответственно. Моментные двигатели почти исключительно управляют сервоклапанами, и обычно для полной работы требуется менее одного ватта мощности, хотя это не является жестким правилом.
Рис. 9. Ток, поступающий в обмотку моментного двигателя (а), заставляет якорь вращаться против жесткой пружины обратной связи. Заслонка, прикрепленная к якорю, блокирует сопло А и разгружает сопло В, в результате чего давление РА повышается, а РВ падает. Этот дисбаланс перемещает золотник влево. Когда золотник движется (b), пружина обратной связи, закрепленная на золотнике и заслонке, толкает заслонку к центру. В конце концов, заслонка и золотник достигают положения, в котором заслонка находится почти по центру, давления почти равны, и золотник останавливается в положении, соответствующем величине крутящего момента (току катушки).
Крутящий момент от моментного двигателя сервоклапана струйной трубы направляет струю к тому или иному ресиверу, вызывая дисбаланс концевых давлений в золотнике. Движение основного золотника продолжается до тех пор, пока пружина обратной связи между основным золотником и жиклером не вернет струйную трубку почти в нулевое положение. В этом случае положение главного золотника соизмеримо с током катушки.
Сопло-заслонка имеет два различных исполнения: уже упомянутое — это жесткая конструкция, в которой сила, создаваемая набегающим на сопло потоком, мала по сравнению с усилиями пружины и моментного двигателя. В мягких конструкциях моментный двигатель и сопла специально подобраны таким образом, чтобы вытекающая из сопла струя оказывала значительное усилие на заслонку. Один из аргументов заключается в том, что эта конструкция более терпима к определенным проблемам загрязнения. Аргумент выглядит следующим образом: когда два фиксированных отверстия полностью открыты и не засорены, заслонка без привода будет центрироваться благодаря сочетанию силы импульса жидкости, действующей на заслонку, восстанавливающей силы на легкой пружине и магнитной силы в моментном двигателе. .
.
Если одна из форсунок или фиксированных отверстий частично засорится, уменьшенный поток сточных вод будет оказывать меньшее усилие на заблокированную сторону заслонки. Затем заслонка перемещается к засоренной опоре перемычки до тех пор, пока уменьшенная сила от противоположного отступающего сопла не сравняется с уменьшенной силой потока от частично заблокированного сопла. Затем ток, подаваемый на моментный двигатель, заставляет заслонку перемещаться относительно смещенной нейтрали, но давление не достигает уровня резкого превышения. Однако основная катушка может не смещаться полностью в одном направлении.
Поворотный стержень, путь D , рис. 8, имеет запатентованный механически-гидравлический интерфейс. Версии этого интерфейса включают:
- двойное сопло, в котором два потока жидкости отклоняются от внешних краев трубки, и
- одиночное сопло, в котором одиночный поток жидкости проходит через центральное отверстие в трубке. Рис. 10. Ток в моментном двигателе сервоклапана со струйной трубкой управляет струйным соплом, вызывая разницу давлений между двумя портами коллектора.
 Например, если давление в порте A высокое, главный золотник перемещается вправо. Одновременно пружина обратной связи тянет реактивное сопло к центру и приблизительно выравнивает давление в коллекторе. Таким образом, основной золотник был расположен в соответствии с направлением тока катушки.
Например, если давление в порте A высокое, главный золотник перемещается вправо. Одновременно пружина обратной связи тянет реактивное сопло к центру и приблизительно выравнивает давление в коллекторе. Таким образом, основной золотник был расположен в соответствии с направлением тока катушки.
 Например, если давление в порте A высокое, главный золотник перемещается вправо. Одновременно пружина обратной связи тянет реактивное сопло к центру и приблизительно выравнивает давление в коллекторе. Таким образом, основной золотник был расположен в соответствии с направлением тока катушки.
Например, если давление в порте A высокое, главный золотник перемещается вправо. Одновременно пружина обратной связи тянет реактивное сопло к центру и приблизительно выравнивает давление в коллекторе. Таким образом, основной золотник был расположен в соответствии с направлением тока катушки.Рассмотрим вариант с двумя соплами, рис. 11. Два потока жидкости, выходящие со стороны источника пилотной головки, собираются в противоположных приемных отверстиях. Когда ток в моментном двигателе заставляет стержень качаться, в одном приемном отверстии происходит повышение давления, а в другом — падение давления. Как и в случае пилотов со струйной трубой и створчатым соплом, результирующая разница давлений смещает основной золотник клапана.
Версия с одним соплом имеет отверстие, просверленное сбоку и расположенное по центру в трубке, так что единый поток жидкости, выходящий из одиночного сопла, должен проходить через отверстие. Когда зонд находится в центре, в двух приемных отверстиях собирается одинаковое давление. Ток в катушке вызывает смещение трубки, и поток жидкости отклоняется от внутреннего края центрального отверстия, в результате чего в двух приемниках накапливается разное давление. Результирующий перепад давления между двумя приемными портами смещает основной золотник.
Ток в катушке вызывает смещение трубки, и поток жидкости отклоняется от внутреннего края центрального отверстия, в результате чего в двух приемниках накапливается разное давление. Результирующий перепад давления между двумя приемными портами смещает основной золотник.
Рис. 11. Пилотная ступень с качающейся трубкой создает перепад давления в портах ресивера C1 и C2, отклоняя два потока жидкости от каждого края трубки. Невидимый моментный двигатель перемещает палочку пропорционально силе тока. Таким образом, разница давлений между C1 и C2 является отражением тока катушки. Давления портов равны, (а), давление С1 выше, (б), и ниже, (в).
Эта конструкция с поворотной трубкой имеет ограничение по давлению подачи, поскольку головка пилота должна быть рассчитана на определенный диапазон давления подачи. Если поток, выходящий из сопла (сопел), является чрезмерным, сила импульса жидкости, действующая на трубку, может прижать ее к стороне приемника, заблокировав ее там. Установка дросселя, соответствующего давлению подачи и потребностям пилотной ступени, последовательно со стороны сопла решает эту проблему. При использовании одной диафрагмы возможно изменение давления подачи приблизительно 2:1.
При использовании одной диафрагмы возможно изменение давления подачи приблизительно 2:1.
Двигатели Force являются линейным эквивалентом моментных двигателей, поскольку они также имеют внутри постоянные магниты. Следовательно, направление движения зависит от направления входного тока, рис. 12. В США есть только один производитель силовых двигателей: Fema Corp., Portage, Mich. Каждый из двух постоянных магнитов создает силы притяжения, каждый из которых толкает якорь к это, но номинально компенсируют друг друга, когда центрированы. Кроме того, жесткая центрирующая пружина не позволяет ни одной из естественных регенеративных сил притяжения тянуть якорь в любом направлении.
При подаче тока в направлении, показанном на рисунке 12, возникающие электромагнитные поля усиливают магнитные поля за счет увеличения плотности потока в воздушных зазорах B и D , в то же время ослабляя поля в воздухе -зазоры А и С . Результирующая сила перемещает якорь и тарелку влево. Современная конструкция силового двигателя обеспечивает максимальное усилие срыва около пяти фунтов, около 0,02 дюйма. хода (без нагрузки) при мощности около 5 Вт.
Современная конструкция силового двигателя обеспечивает максимальное усилие срыва около пяти фунтов, около 0,02 дюйма. хода (без нагрузки) при мощности около 5 Вт.
Пропорциональные соленоидыРис. 12. Постоянный магнит создает равные потоки в четырех воздушных зазорах электромагнитного силового двигателя, что приводит к нулевой силе на якоре. Например, ток в катушке в показанном направлении усиливает поток в зазорах B и D и ослабляет поток в зазорах A и C. Теперь влево действует результирующая сила, прижимающая тарелку к соплу. Через контроль силы ток контролирует выходное давление.
Пропорциональным соленоидам около 30 лет, и они производятся рядом компаний по всему миру. Некоторые продают свои соленоиды для промышленности США, в то время как другие поставляют их сами. Все конкурирующие продукты имеют схожие технические характеристики. Современная конструкция пропорционального соленоида обеспечивает эти приблизительно типичный технические характеристики:
- максимальная сила, 20 фунтов
- пропорциональное перемещение, ток 0,10 дюйма, катушка 12 В, 1,5–2,5 А и
- мощность от 15 до 25 Вт. На рис. 13 показаны приблизительные детали конструкции пропорционального соленоида. Секреты успеха заключаются в правильном формировании трапециевидного воздушного зазора и в поддержании низкого трения.
 На рис. 13 показаны приблизительные детали конструкции пропорционального соленоида. Секреты успеха заключаются в правильном формировании трапециевидного воздушного зазора и в поддержании низкого трения.
На рис. 13 показаны приблизительные детали конструкции пропорционального соленоида. Секреты успеха заключаются в правильном формировании трапециевидного воздушного зазора и в поддержании низкого трения. На рис. 14 показана репрезентативная кривая сила-перемещение для пропорционального соленоида. Его уникальными характеристиками являются область относительно постоянной силы при изменении положения якоря, а также относительно линейные изменения силы при изменении тока соленоида, обе цели, к которым стремились разработчики соленоида. Вероятно, верно, что ни постоянство силы, ни линейность по току не так важны, как утверждают производители. Элементы, встроенные вне соленоида, существенно влияют на работу всего клапана: например, использование обратной связи по давлению или обратной связи по положению якоря. Кроме того, огромная гибкость аппаратного и программного обеспечения современных компьютеров делает управление и линеаризацию довольно простой задачей.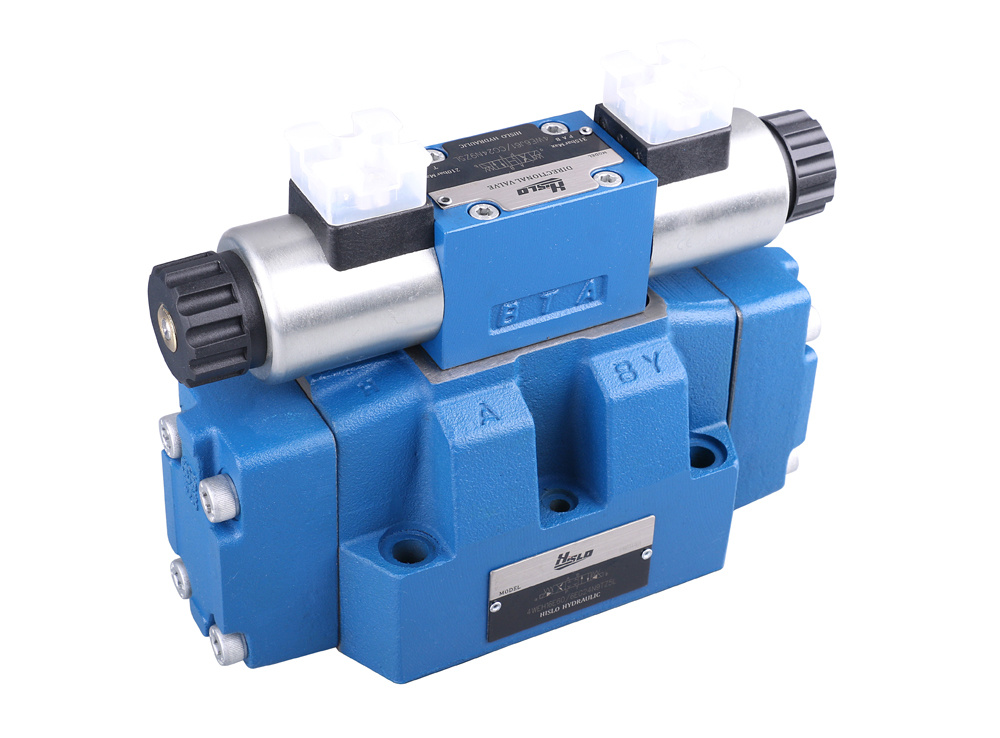
Сравнение устройств
Некоторые различия между пропорциональными соленоидами и силовыми/моментными двигателями очевидны в спецификациях, а другие нет. Моментно-силовые двигатели требуют более низких уровней тока. Пропорциональные соленоиды:
Рис. 13. Трапециевидный воздушный зазор пропорционального соленоида имеет такую форму, чтобы создавать относительно постоянную силу независимо от положения якоря при постоянном токе. Поскольку постоянных магнитов нет, сила всегда направлена в одну сторону (в данном случае влево), независимо от направления тока. Таким образом, двунаправленные клапаны всегда требуют двух пропорциональных соленоидов.
- требуют гораздо более высокой входной электрической мощности, чем их аналоги двигателей
- обеспечивают значительно большее механическое перемещение, чем двигатели
- производить более высокие уровни силы
- производить более высокие уровни сцепления
- работать с большим гистерезисом, а
- генерировать силу в направлении, независимом от текущего направления. Таким образом, для работы 4-ходового распределителя требуется два пропорциональных соленоида, но только один силовой/моментный двигатель.
.
 Таким образом, для работы 4-ходового распределителя требуется два пропорциональных соленоида, но только один силовой/моментный двигатель.
Таким образом, для работы 4-ходового распределителя требуется два пропорциональных соленоида, но только один силовой/моментный двигатель.Рис. 14. Типичные кривые силы в зависимости от положения якоря показывают область пропорционального хода якоря соленоида, где имеется относительно постоянная сила при постоянном токе. Разработчики клапанов должны использовать соленоид, чтобы якорь работал в этой пропорциональной области. С современной технологией область составляет около 0,10 дюйма. широкий.
Все эти факторы делают электронику пропорционально-соленоидного привода более сложной, чем это необходимо для силовых/моментных двигателей. Требования к мощности пропорционального соленоида заставили производителей электроники привода пропорциональных клапанов принять широтно-импульсную модуляцию (ШИМ) в качестве предпочтительного метода выходной мощности. Основной причиной использования ШИМ является обеспечение высокой выходной мощности, необходимой для соленоида, без перегрузки выходных транзисторов.
Существует еще одно преимущество использования ШИМ: если частота ШИМ достаточно низкая, она автоматически обеспечивает механическое сглаживание, помогающее минимизировать гистерезис, вызванный трением. В некоторых клапанах эффект дизеринга можно охарактеризовать как драматический, если смотреть на снижение гистерезиса. Правильная частота дизеринга должна быть определена после проектирования клапана. Кроме того, выбранная частота должна быть компромиссом между незаметным распространением пульсаций дрожания в гидравлическом контуре и достижением достаточного снижения трения. Низкая частота помогает решить проблему заедания, но если она слишком низкая, пользователь гидравлической системы может почувствовать пульсации.
Рис. 15. Генеалогическое древо пилотируемых ПФЭИУ.
Промышленность США использует частоты ШИМ от примерно 33 Гц до примерно 400 Гц. По крайней мере, один европейский производитель использует 40 кГц и не получает никаких эффектов дизеринга. Их усилитель обеспечивает дизеринг с помощью отдельного встроенного генератора дизеринга.