

Выберите продукцию из спискаНормирующие преобразователи измерительные …НПСИ-ТП нормирующий преобразователь сигналов термопар и напряжения …НПСИ-237-ТП нормирующий преобразователь сигналов термопар и напряжения, IP65 …НПСИ-ТС нормирующий преобразователь сигналов термосопротивлений …НПСИ-237-ТС нормирующий преобразователь сигналов термосопротивлений, IP65 …НПСИ-150-ТП1 нормирующий преобразователь сигналов термопар и напряжения …НПСИ-150-ТС1 нормирующий преобразователь сигналов термометров сопротивления …НПСИ-110-ТП1 нормирующий преобразователь сигналов термопар и напряжения …НПСИ-110-ТС1 нормирующий преобразователь сигналов термометров сопротивления …НПСИ-250/500-УВ1 преобразователь сигналов термопар, термосопротивлений и потенциометров…НПСИ-250/500-УВ1.2 преобразователь сигналов термопар, термосопротивлений и потенциометров, разветвитель «1 в 2» …НПСИ-230-ПМ10 нормирующий преобразователь сигналов потенциометров . |
 ..ПНТ-х-х нормирующий преобразователь сигналов термопар…ПСТ-х-х нормирующий преобразователь сигналов термосопротивлений…ПНТ-a-Pro нормирующий преобразователь сигналов термопар программируемый…ПCТ-a-Pro нормирующий преобразователь сигналов термосопротивлений программируемый…ПНТ-b-Pro нормирующий преобразователь сигналов термопар программируемый…ПCТ-b-Pro нормирующий преобразователь сигналов термосопротивлений программируемыйБарьеры искрозащиты (барьеры искробезопасности)…КА5003Ех барьеры искрозащиты, разветвители 1 в 2 сигналов термопар, термометров сопротивления и потенциометров, 1-канальные, USB, RS-485…КА5004Ех барьеры искрозащиты, сигналы термопар, термометров сопротивления и потенциометров, сигнализация, USB, RS-485…КА5011Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5022Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные…КА5013Ех барьеры искрозащиты (барьеры искробезопасности), приемники-разветвители 1 в 2 аналогового сигнала (4…20) мА, 1-канальные, HART, шина питания .
..ПНТ-х-х нормирующий преобразователь сигналов термопар…ПСТ-х-х нормирующий преобразователь сигналов термосопротивлений…ПНТ-a-Pro нормирующий преобразователь сигналов термопар программируемый…ПCТ-a-Pro нормирующий преобразователь сигналов термосопротивлений программируемый…ПНТ-b-Pro нормирующий преобразователь сигналов термопар программируемый…ПCТ-b-Pro нормирующий преобразователь сигналов термосопротивлений программируемыйБарьеры искрозащиты (барьеры искробезопасности)…КА5003Ех барьеры искрозащиты, разветвители 1 в 2 сигналов термопар, термометров сопротивления и потенциометров, 1-канальные, USB, RS-485…КА5004Ех барьеры искрозащиты, сигналы термопар, термометров сопротивления и потенциометров, сигнализация, USB, RS-485…КА5011Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5022Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные…КА5013Ех барьеры искрозащиты (барьеры искробезопасности), приемники-разветвители 1 в 2 аналогового сигнала (4…20) мА, 1-канальные, HART, шина питания . ..КА5031Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5032Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные, HART …КА5131Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 1-канальные, HART …КА5132Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 2-канальные…КА5241Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 1-канальные…КА5242Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5262Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5232Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5234Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 4-канальныеКонтроллеры, модули ввода-вывода.
..КА5031Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 1-канальные, HART …КА5032Ех барьеры искрозащиты (барьеры искробезопасности), приёмники аналогового сигнала (4…20) мА, 2-канальные, HART …КА5131Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 1-канальные, HART …КА5132Ех барьеры искрозащиты (барьеры искробезопасности), передатчики аналогового сигнала (4…20) мА, 2-канальные…КА5241Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 1-канальные…КА5242Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5262Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5232Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 2-канальные…КА5234Ех барьеры искрозащиты (барьеры искробезопасности), приёмники дискретных сигналов, 4-канальныеКонтроллеры, модули ввода-вывода. ..MDS AIO-1 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-1/F1 Модули комбинированные функциональные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-4 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-4/F1 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов, 4 ПИД регулятора…MDS AI-8UI Модули ввода аналоговых сигналов тока и напряжения…MDS AI-8TC Модули ввода сигналов термопар, тока и напряжения…MDS AI-8TC/I Модули ввода сигналов термопар, тока и напряжения с индивидуальной изоляцией между входами…MDS AI-3RTD Модули ввода сигналов термосопротивлений и потенциометров…MDS AO-2UI Модули вывода сигналов тока и напряжения…MDS DIO-16BD Модули ввода-вывода дискретных сигналов…MDS DIO-4/4 Модули ввода-вывода дискретных сигналов …MDS DIO-12h4/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DIO-8H/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DI-8H Модули ввода дискретных сигналов высоковольтные.
..MDS AIO-1 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-1/F1 Модули комбинированные функциональные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-4 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов…MDS AIO-4/F1 Модули комбинированные ввода-вывода аналоговых и дискретных сигналов, 4 ПИД регулятора…MDS AI-8UI Модули ввода аналоговых сигналов тока и напряжения…MDS AI-8TC Модули ввода сигналов термопар, тока и напряжения…MDS AI-8TC/I Модули ввода сигналов термопар, тока и напряжения с индивидуальной изоляцией между входами…MDS AI-3RTD Модули ввода сигналов термосопротивлений и потенциометров…MDS AO-2UI Модули вывода сигналов тока и напряжения…MDS DIO-16BD Модули ввода-вывода дискретных сигналов…MDS DIO-4/4 Модули ввода-вывода дискретных сигналов …MDS DIO-12h4/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DIO-8H/4RA Модули ввода-вывода дискретных сигналов высоковольтные…MDS DI-8H Модули ввода дискретных сигналов высоковольтные. ..MDS DO-8RС Модули вывода дискретных сигналов …MDS DO-16RA4 Модули вывода дискретных сигналов …MDS IC-USB/485 преобразователь интерфейсов USB и RS-485…MDS IC-232/485 преобразователь интерфейсов RS-232 и RS-485…I-7561 конвертер USB в RS-232/422/485…I-7510 повторитель интерфейса RS-485/RS-485…I-7520 преобразователь интерфейса RS-485/RS-232Измерители-регуляторы технологические…МЕТАКОН-6305 многофункциональный ПИД-регулятор с таймером выдержки…МЕТАКОН-4525 многоканальный ПИД-регулятор…МЕТАКОН-1005 измеритель технологических параметров, щитовой монтаж, RS-485…МЕТАКОН-1015 измеритель, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1105 измеритель, позиционный регулятор, щитовой монтаж, RS-485…МЕТАКОН-1205 измеритель-регулятор, нормирующий преобразователь, контроллер, щитовой монтаж, RS-485…МЕТАКОН-1725 двухканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1745 четырехканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485.
..MDS DO-8RС Модули вывода дискретных сигналов …MDS DO-16RA4 Модули вывода дискретных сигналов …MDS IC-USB/485 преобразователь интерфейсов USB и RS-485…MDS IC-232/485 преобразователь интерфейсов RS-232 и RS-485…I-7561 конвертер USB в RS-232/422/485…I-7510 повторитель интерфейса RS-485/RS-485…I-7520 преобразователь интерфейса RS-485/RS-232Измерители-регуляторы технологические…МЕТАКОН-6305 многофункциональный ПИД-регулятор с таймером выдержки…МЕТАКОН-4525 многоканальный ПИД-регулятор…МЕТАКОН-1005 измеритель технологических параметров, щитовой монтаж, RS-485…МЕТАКОН-1015 измеритель, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1105 измеритель, позиционный регулятор, щитовой монтаж, RS-485…МЕТАКОН-1205 измеритель-регулятор, нормирующий преобразователь, контроллер, щитовой монтаж, RS-485…МЕТАКОН-1725 двухканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485…МЕТАКОН-1745 четырехканальный измеритель-регулятор, нормирующий преобразователь, щитовой монтаж, RS-485. ..МЕТАКОН-512/532/562 многоканальные измерители-регуляторы…Т-424 универсальный ПИД-регулятор…МЕТАКОН-515 быстродействующий универсальный ПИД-регулятор…МЕТАКОН-513/523/533 ПИД-регуляторы…МЕТАКОН-514 ПДД-регулятор…МЕТАКОН-613 программные ПИД-регуляторы…СТ-562-М источник тока для ПМТ-2, ПМТ-4Регистраторы видеографические…ИНТЕГРАФ-1100 видеографический безбумажный 4/8/12/16 канальный регистратор данных Счётчики, реле времени, таймеры…ЭРКОН-1315 восьмиразрядный одноканальный счётчик импульсов, поддержка RS-485, щитовой монтаж…ЭРКОН-315 счётчик импульсов одноканальный, поддержка RS-485, щитовой монтаж…ЭРКОН-325 счетчик импульсов двухканальный, поддержка RS-485, щитовой монтаж…ЭРКОН-415 тахометр-расходомер…ЭРКОН-615 счетчик импульсов реверсивный многофункциональный, поддержка RS-485, щитовой монтаж…ЭРКОН-714 таймер астрономический…ЭРКОН-214 одноканальное реле времени, цифровая индикация, монтаж на DIN-рельс или на панель…ЭРКОН-224 двухканальное реле времени, цифровая индикация, монтаж на DIN-рельс или на панель.
..МЕТАКОН-512/532/562 многоканальные измерители-регуляторы…Т-424 универсальный ПИД-регулятор…МЕТАКОН-515 быстродействующий универсальный ПИД-регулятор…МЕТАКОН-513/523/533 ПИД-регуляторы…МЕТАКОН-514 ПДД-регулятор…МЕТАКОН-613 программные ПИД-регуляторы…СТ-562-М источник тока для ПМТ-2, ПМТ-4Регистраторы видеографические…ИНТЕГРАФ-1100 видеографический безбумажный 4/8/12/16 канальный регистратор данных Счётчики, реле времени, таймеры…ЭРКОН-1315 восьмиразрядный одноканальный счётчик импульсов, поддержка RS-485, щитовой монтаж…ЭРКОН-315 счётчик импульсов одноканальный, поддержка RS-485, щитовой монтаж…ЭРКОН-325 счетчик импульсов двухканальный, поддержка RS-485, щитовой монтаж…ЭРКОН-415 тахометр-расходомер…ЭРКОН-615 счетчик импульсов реверсивный многофункциональный, поддержка RS-485, щитовой монтаж…ЭРКОН-714 таймер астрономический…ЭРКОН-214 одноканальное реле времени, цифровая индикация, монтаж на DIN-рельс или на панель…ЭРКОН-224 двухканальное реле времени, цифровая индикация, монтаж на DIN-рельс или на панель. ..ЭРКОН-215 реле времени программируемое одноканальное, поддержка RS-485, щитовой монтаж, цифровая индикацияБлоки питания и коммутационные устройства…PSM-72-24 блок питания 24 В (3 А, 72 Вт)…PSM-36-24 блок питания 24 В (1,5 А, 36 Вт)…PSL низковольтные DC/DC–преобразователи на DIN-рейку 3 и 10 Вт…PSM/4R-36-24 блок питания и реле, 24 В (1,5 А, 36 Вт)…БП-24/12-0,5 блок питания 24В/12В (0,5А)…ФС-220 фильтр сетевой…БПР блок питания и реле…БКР блок коммутации реверсивный (пускатель бесконтактный реверсивный)…БР4 блок реле…PS3400.1 блок питания 24 В (40 А) …PS3200.1 блок питания 24 В (20 А)…PS3100.1 блок питания 24 В (10 А)…PS3050.1 блок питания 24 В (5 А)…PS1200.1 блок питания 24 В (20 А)…PS1100.1 блок питания 24 В (10 А)…PS1050.1 блок питания 24 В (5 А)Программное обеспечение…SetMaker конфигуратор…… История версий…MDS Utility конфигуратор…RNet программное обеспечение…OPC-сервер для регулятров МЕТАКОН…OPC-сервер для MDS-модулей
..ЭРКОН-215 реле времени программируемое одноканальное, поддержка RS-485, щитовой монтаж, цифровая индикацияБлоки питания и коммутационные устройства…PSM-72-24 блок питания 24 В (3 А, 72 Вт)…PSM-36-24 блок питания 24 В (1,5 А, 36 Вт)…PSL низковольтные DC/DC–преобразователи на DIN-рейку 3 и 10 Вт…PSM/4R-36-24 блок питания и реле, 24 В (1,5 А, 36 Вт)…БП-24/12-0,5 блок питания 24В/12В (0,5А)…ФС-220 фильтр сетевой…БПР блок питания и реле…БКР блок коммутации реверсивный (пускатель бесконтактный реверсивный)…БР4 блок реле…PS3400.1 блок питания 24 В (40 А) …PS3200.1 блок питания 24 В (20 А)…PS3100.1 блок питания 24 В (10 А)…PS3050.1 блок питания 24 В (5 А)…PS1200.1 блок питания 24 В (20 А)…PS1100.1 блок питания 24 В (10 А)…PS1050.1 блок питания 24 В (5 А)Программное обеспечение…SetMaker конфигуратор…… История версий…MDS Utility конфигуратор…RNet программное обеспечение…OPC-сервер для регулятров МЕТАКОН…OPC-сервер для MDS-модулейЭлектрические исполнительные механизмы
Основные технические характеристики
|
Тип
|
ST 0
|
ST 0,1
|
ST1
|
ST2
|
МТ
|
|
Усилие на штоке, Н
|
4500
|
6 300
|
10000
|
25000
|
25000
|
|
Мощность потребляемая (макс), Вт
|
2,75
|
15
|
15
|
90
|
120
|
|
Масса, не более, кг
|
4
|
7,8
|
9
|
21
|
30
|
|
Рабочее положение
|
Любое
|
Вертикальное
| |||
|
Степень защиты электропривода
|
IP54 EN
|
IP 65
|
IP 65
|
IP 55
| |
|
Напряжение питания, В АС
|
Однофазное 220±10%
|
1-фаз.
| |||
|
Частота, ГЦ
|
50/60±2%
| ||||
 ,3 — хфазн.
,3 — хфазн.
Условия эксплуатации
|
Окружающая температура, °С
|
От минус 25 до 55
|
|
Относительная влажность, %
|
От 5 до 100%, при температуре +31° с конденсацией, макс. содержание воды 28г/кг сухого воздуха
|
|
Барометрическое давление, КПа
|
86…108
|
Общий вид ST 0,1
|
Р-1202/Е
|
426
|
429
|
513
|
|
P-1202/D
|
416
|
419
|
503
|
|
Р-1202/ВС
|
434
|
437
|
521
|
|
Р-1202/А
|
425
|
428
|
512
|
|
Исполнение
|
L
|
L1
|
L2
|
Примечание:
1) Взноситься для 24V АС: Размер «L», «L1» и «L2» повышается о 8 мм.
2) Взноситься для управления вручную с перманентной готовностью.
3) Взноситься для управления вручную без перманентной готовности.
4) Взноситься для управления вручную.
Общий вид ST 0
|
Р-1182/D
|
110
|
40
|
302
|
85
|
85
|
|
P-1182/B
|
103
|
25
|
265
|
55
|
85
|
|
P-1182/A
|
110
|
25
|
275
|
55
|
85
|
|
Исполнение
|
L
|
Z
|
M
|
А
|
В
|
Настоящие размеры относятся к исполнению с преобразователем и для исполнения с регулятором.
Электрическое присоединение ЭИМ ST1
Z21 — Схема присоединения добавочных позиционных переключателей, Z22 — Схема присоединения датчика сопротивления, простого, Z23 — Схема присоединения 2-проводникового преобразователя, Z32 — Схема присоединения датчика сопротивления, двойного, Z33 — Схема присоединения прибора с силовыми выключ. и позиционным выключателем, Z45 — Схема присоединения емкостного датчика (2-проводникового) с встроенным источником, Z46 — Схема присоед. емкостного датчика (2 -проводниковый) без встроенного источника, Z257 — Схема присоед. електронного датчика положения 3-провод. включение без источника, Z260 — Схема присоед. електронного датчика положения — 3-провод. включение с источником, Z269 — Схема присоед електронного датчика положения — 2 провод. включение с источником, В1 — Датчик положения — сопротивления, простый, В2 — Датчик положения — сопротивления, двойной, ВЗ — Электронный датчик положения, или емкостный датчик, С — Конденсатор, Е1 — Тепловое сопротивление, F1 — Тепловая защита, F2 — Термический выключатель теплового сопротивления, I — Выходные сигналы тока, М — Электродвигатель, R — Сопротивление осадительное, RL — Нагрузочное сопротивление, S1 — Силовый выключатель «открыто», S2 — Силовый выключатель «закрыто», S3 — Позиционный выключатель «открыто», S5 — Добавочный позиционный выключатель «открыто», S6 — Добавочный позиционный выключатель «закрыто», X,Х2 — Клеммная колодка.
3. Электрические исполнительные механизмы
Электрические
исполнительные механизмы в зависимости
от типа принципа действия делят на
электромагнитные и электродвигательные.
Электромагнитные
исполнительные механизмы являются
наиболее простыми, надежными и
быстродействующими из электрических
исполнительных механизмов. Их используют
для управления различного рода
регулирующими и затворными клапанами,
вентилями, золотниками и т. п. По виду
движения исполнительного (регулирующего)
органа (шток, выходной вал) электромагнитные
механизмы подразделяют на электромагниты
с прямолинейным движением и электромагнитные
муфты с вращательным движением.
Рис. 38.
Электромагнит
В
зависимости от требований электромагниты
могут отличаться друг от друга
конструктивно. Однако они имеют общие
элементы (рис. 38): катушку 2,
подвижный сердечник 3,
возвратную пружину 1.
С помощью подвижного сердечника энергия
магнитного поля преобразуется в
механическую и через шток 4
передается
запирающему элементу. Перемещение
сердечника, при котором происходит
движение запирающего элемента, называют
рабочим ходом 6.
По
характеру движения сердечника и
связанного с ним регулирующего органа
электромагнитные механизмы подразделяют
на тянущие, толкающие, поворотные,
удерживающие и реверсивные.
В
тянущих механизмах линейное перемещение
сердечника направлено от точки приложения
противодействующих сил, а в толкающих
– наоборот. В поворотных электромагнитных
механизмах при подаче напряжения на
обмотку катушки силовой элемент
поворачивается на определенный угол.
Применение поворотных механизмов
ограничивается вследствие малых крутящих
моментов и громоздкости конструкции.
Реверсивные
электромагнитные механизмы обеспечивают
изменение перемещения
силового элемента в зависимости от
характера электрического сигнала.
Реверсивный механизм обычно содержит
два электромагнита, сердечники которых
механически связаны с запирающим
элементом.
По
количеству позиций выходного силового
элемента (регулирующего органа) различают
одно-, двух- и трехпозиционные
электромагнитные механизмы. У
однопозиционных механизмов при подаче
тока на обмотку катушки сердечник
занимает одно определенное положение.
У двухпозиционных механизмов силовой
элемент занимает одно из двух положений
в зависимости от того, на обмотку какого
электромагнита подается электрический
ток. После обесточивания он сохраняет
занятое им положение. Выходной силовой
элемент трехпозиционных электромагнитных
механизмов при отсутствии тока в обмотках
занимает нейтральное положение.
В
зависимости от вида питающего напряжения
электромагнитные механизмы могут быть
переменного и постоянного тока, а также
со сменными катушками переменного и
постоянного токов с унифицированным
магнитопроводом.
В
настоящее время получили широкое
распространение электромагнитные
приборы серии ЭВ. Приводы ЭВ‑1
Приводы ЭВ‑1
и ЭВ‑2 рассчитаны на
длительный режим работы, а привод ЭВ‑3
рассчитан на кратковременный режим
работы (в течение 1 мин) при усилии 100 Н.
В
термических и литейных цехах исполнительные
механизмы с электромагнитным приводом
используют в регуляторах температуры
в топливных печах, давления и расхода
сжатого воздуха в формовочных машинах.
Электромагнитные
муфты являются связующим звеном между
приводом и регулирующим органом.
Электромагнитные муфты обладают высоким
быстродействием, плавным пуском и
регулированием скорости, просты в
управлении и имеют мощность от нескольких
ватт до сотен киловатт.
По
принципу действия электромагнитные
муфты разделяют на фрикционные и
порошковые муфты и муфты скольжения.
Фрикционная
муфта (рис. 39) состоит из двух полумуфт:
ведущей 1
и ведомой 6,
посаженных на валы 3 и Р. В корпусе ведущей
полумуфты имеется обмотка 5, питаемая
электрическим током через кольца 4
и щетки 2.
При подаче постоянного электрического
тока на обмотку возникает магнитный
поток, который притягивает по шлицам 8
к себе ведомую полумуфту. Последняя,
преодолевая усилие пружины 7,
притягивается к ведомой полумуфте. Силы
трения между полумуфтами позволяют
передать крутящий момент с ведущего
вала на ведомый. При выключении тока
магнитное поле исчезает, и пружины 7
разъединяют полумуфты друг от друга,
прерывая тем самым вращение вала 9.
Однодисковые
муфты не позволяют передавать большие
крутящие моменты. Для этого используют
многодисковые муфты, имеющие большое
число поверхностей трения.
Рис 39. | Рис. 40. |
Порошковые
муфты (ферропорошковые или
магнитоэмульсионные) работают по
принципу намагничивания ферромагнитной
среды, заполняющей пространство между
полумуфтами 1
и 2 (рис. 40).
40).
Ферромагнитная среда 4
представляет собой обычно смесь порошка
карбонильного или кремнистого железа
и смазывающего вещества (тальк, графит,
масло), улучшающего проскальзывание
полумуфт при холостом ходе и уменьшающего
истирание ферропорошка. При подаче тока
в обмотку 3
ведущей пол у муфты 1
возникает
магнитное поле, намагничивающее отдельные
частички железного порошка, которые
слипаются между собой, увеличивая
вязкость ферромагнитной среды. Ведомая
полумуфта 2
начинает вращаться, передавая вращение
на объект управления. Вязкость
ферромагнитной среды зависит от силы
тока в обмотке, следовательно, можно
при росте тока увеличивать передаваемый
крутящий момент. Таким образом, муфты
вязкого трения являются управляемыми,
т. е. позволяют плавно регулировать
вращающий передаваемый момент, а
следовательно, и частоту вращения
ведомого вала.
Электромагнитные
муфты скольжения состоят из двух основных
частей полумуфт (рис. 41). На ведущем
валу 1
устанавливают полумуфту с индуктором
3
в виде электромагнита постоянного тока
с катушкой возбуждения 6
и полюсами 7. На ведомом валу закреплена
На ведомом валу закреплена
полумуфта с якорем 4
в виде роторной клетки асинхронного
двигателя. Ток к катушке 6
подается через щетки и контактные кольца
2.
При вращении ведущего вала магнитное
поле индуктора 3
вращается относительно якоря 4,
наведя в нем токи, которые, взаимодействуя
с магнитным полем индуктора, создают
крутящий момент. Якорь и вал 5 начинают
вращаться. При отключении тока вращение
якоря прекращается. Имеются конструкции
не только с наружным, но и с внутренним
расположением якоря. Достоинством
рассмотренной конструкции является ее
высокая надежность, а также возможность
плавно регулировать передаваемый момент
за счет изменения напряжения питания.
Рис. 41.
Электромагнитная муфта скольжения
Промышленность
выпускает муфты для механизмов малых
мощностей типа ПМС с номинальным моментом
1,7 … 30 Нм.
Для механизмов большей мощности выпускают
муфты серии ИМС с номинальными моментами
70 . .. 1600 Нм.
.. 1600 Нм.
Электродвигательный
механизм состоит из исполнительного
двигателя редуктора и тормоза. Сигнал
управления одновременно подается на
двигатель и тормоз, при этом тормоз
растормаживается и двигатель приводит
в движение регулирующий орган. При
снятии сигнала двигатель выключается,
а тормоз останавливает движение
регулирующего органа.
Исполнительными
двигателями называют управляемые
двигатели малой мощности, которые
предназначены для преобразования
электрического сигнала в механическое
вращение вала.
Как
правило, исполнительные двигатели имеют
две обмотки: возбуждения и управления.
Исключение составляют двигатели с
постоянными магнитами. Обмотки возбуждения
постоянно находятся под напряжением,
а на обмотку управления сигнал подается
лишь тогда, когда необходимо получить
вращение вала. Так как исполнительные
двигатели работают в схемах управления,
то для них в основном характерны пуски,
остановки или реверсии. Время их вращения
обычно невелико, поэтому эти двигатели
никогда не снабжаются вентиляторами.
В цепях сопряжения переходных процессов
исполнительные двигатели стремятся
выполнить малоинерционными и
малогабаритными. В настоящее время в
качестве исполнительных двигателей
используют двухфазные асинхронные,
синхронные шаговые двигатели и двигатели
постоянного тока.
Типы
электродвигателей, их устройство и
схемы выключения изучаются в курсе
«Общая электротехника» и поэтому здесь
не рассматриваются.
4. ГИДРАВЛИЧЕСКИЕ
И ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ
МЕХАНИЗМЫ
Гидравлические
и пневматические исполнительные
двигатели преобразуют энергию рабочей
среды, находящейся под давлением, в
механическую энергию поступательного
или вращательного движения.
В
качестве рабочей среды в гидродвигателях
чаще всего используется минеральное
масло, сохраняющее свои свойства при
воздействии на него высокого давления.
В пневмодвигателях рабочей средой
служит сжатый воздух.
Рис. | Рис. 43. |
 42.
42. В
устройствах автоматического управления
гидро- и пневмодвигатели используют
значительно реже, чем электрические.
Однако в ряде случаев они оказываются
единственно приемлемыми в
техническом
отношении.
Гидро-
и пневмодвигатели способны развивать
очень большие усилия (0,03 … 0,3 МН)
при малых габаритных размерах. По этим
параметрам они превосходят все остальные
двигатели. Они просты по конструкции,
надежно работают и не нуждаются в
редукторах для согласования с регулирующим
органом. Гидравлические и пневматические
двигатели имеют одинаковый принцип
действия, их различие лишь в быстродействии.
Различают
две основные разновидности гидро- и
пневмодвигателей: с поступательным
движением (мембранные и поршневые) и с
вращательным движением (шестеренчатые,
лопастные, плунжерные и турбинные).
В
мембранном исполнительном механизме
(рис. 42) перемещение выходного штока
4
осуществляется силой, создаваемой
давлением рабочей среды на мембрану 2.
При этом возвратная пружина 3
сжимается. Чем больше диаметр мембраны,
тем большее усилие может быть передано
на регулирующий орган. Полость под
мембраной соединена с атмосферой. При
снятии давления мембрана и, следовательно,
шток возвращаются возвратной пружиной
в исходное положение. Диски 1
обеспечивают жесткость мембраны,
изготовленной из прорезиненной ткани.
Значительно
реже применяют поршневые исполнительные
механизмы. Их используют в тех случаях,
когда шток необходимо перемещать на
расстояние более 300 мм.
В
цилиндре 1
исполнительного механизма (рис. 43)
перемещается поршень 2
со штоком 3.
Поршень будет неподвижен при равенстве
давлений Р1
и Р2.
Если давление в левой полости больше,
то на поршень будет действовать сила,
равная разности давлений Р1
и Р2, умноженной на площадь
поверхности поршня. Под действием этой
Под действием этой
силы поршень начнет перемещаться вправо.
Шток 3
проходит через уплотнительный сальник
4.
По
способу управления гидро- и пневмоцилиндры
могут быть дроссельными и с объемным
управлением. При дроссельном управлении
в качестве управляющего устройства
используют золотники, устройства типа
сопло-заслонка или струйные трубки. При
объемном управлении в качестве источников
энергии используют насосы или компрессоры
переменной производительности.
Рис 44.
Регулирующая заслонка
Гидро-
и пневмодвигатели применяют в устройствах
привода автоматических манипуляторов
и исполнительных механизмов, дозаторов,
затворов и питателей, предназначенных
для регулирования расходов формовочных
и других сыпучих и пусковых материалов.
5. РЕГУЛИРУЮЩИЕ
ОРГАНЫ
Для
непрерывного регулирования в
запорно-регулирующих устройствах
применяют дросселирующие регулирующие
органы следующих типов: заслонки,
клапаны, краны, шиберы и направляющие
аппараты.
В
заслонках (рис. 44) изменение пропускной
способности достигается поворотом
заслонки (диска) в седле. Они просты по
конструкции и имеют удовлетворительные
регулировочные свойства. Заслонки можно
устанавливать на вертикальных и
горизонтальных участках трубопроводов.
Они получили широкое распространение
в литейных и термических цехах для
регулирования потоков газа и воздуха
в трубопроводе с избыточным давлением
до 0,25 МПа.
Клапаны
применяют для регулирования расходов
газа, воздуха или пара при давлении до
20 МПа. В зависимости от числа положений
их подразделяют на двух- и трехходовые.
В
зависимости от положения запирающего
элемента при обесточенной катушке
двухходовые клапаны делят на нормально
закрытые (рис. 45, а)
и нормально открытые (рис. 45, б).
В нормально закрытом клапане при
отсутствии тока проходной канал закрыт,
а в нормально открытом – открыт. Тяговое
усилие большинства электромагнитов
резко уменьшается с увеличением хода
сердечника, что вызывает увеличение
габаритных размеров и потребляемой
мощности. Поэтому в клапанах с
Поэтому в клапанах с
электромагнитными механизмами применяют
уравновешивающие запирающие элементы
(рис. 45, в)
и встроенные усилители (рис. 45, г).
В
соответствии с типом дроссельного
органа клапаны делят на золотниковые,
диафрагмовые и шланговые. Золотниковые
клапаны бывают односедельные (рис. 45,
а и б), двухседельные (рис. 45,
в)
и многоседельные. Запорные элементы
всех клапанов выполняют либо в форме
тарелки (рис. 45, а–в),
либо с конической (рис. 45, г)
или шаровой поверхностью.
Рис. 45.
Схемы золотниковых клапанов с
электромагнитным механизмом:
а
– нормально закрытый; б
–
нормально открытый;
в
– с уравновешивающим запирающим
элементом;
г
– со встроенным усилителем; д
и е
– распределительных;
1
– обмотка; 2
–
возвратная пружина; 3
– сердечник; 4
– шток;
5
– запирающий элемент; 6
– седло; 7 – корпус
Трехходовые
(распределительные) клапаны имеют три
присоединительных прохода, через которые
два потока соединяются в один (рис. 45,
45,
д) или один поток
разделяется на два (рис. 45, е).
Краны
являются простейшими регулирующими
органами, которые применяют для
регулирования расхода потока в
трубопроводах небольшого сечения.
Наиболее распространенной является
конструкция крана с пробкой в виде
усеченного конуса, притертого к корпусу.
В пробке имеется отверстие круглой,
овальной или прямоугольной формы, сквозь
которое протекает регулируемая среда.
Поворотом пробки регулируется расход
жидкости, протекающей по трубопроводу.
Шиберы
устанавливают в дымоходах топливных
плавильных и термических печей. Они
предназначены для регулирования давления
в рабочем пространстве печи.
При
изменении входной скорости газа или
воздуха дымососов и вентиляторов
изменяются их производительность и
напор. На этом свойстве основано
устройство регулирующего органа на
базе направляющего аппарата. Регулирующий
орган, выполненный в виде направляющего
аппарата, практически безинерционен и
более экономичен, чем регулирующий
орган, использующий дросселирование
потока.
Дозирующие
исполнительные органы подразделяют на
две группы: механические и электрические.
К первой группе относятся плужковые
сбрасыватели, дозаторы, питатели, насосы,
компрессоры. Во вторую группу входят
реостатные и автотрансформаторные
регулирующие органы.
Плужковые
сбрасыватели широко применяют в литейных
цехах для регулирования уровня различных
формовочных материалов в бункерах
бегунов, формовочных и стержневых машин.
Плужки выполняют в виде лемеха плуга
или другого скребкового устройства и
устанавливают над ленточным транспортером
с движущимся сыпучим материалом. Плужок
может занимать два положения: на ленте
или над ней.
Дозаторы
представляют механизмы, предназначенные
для выдачи потока материала с обеспечением
требуемого значения расхода.
Практически
для всех сыпучих материалов, кроме
порошкообразных, могут применяться
одни и те же дозаторы. Для порошковых
материалов используют дозаторы,
исключающие самопроизвольное движение
материала.
Дозаторы
непрерывного действия различают по
способу регулирования производительности,
типу систем автоматического регулирования,
характеристики дозируемого материала
и конструктивным признакам.
Рис. 46.
Схемы рабочих органов дозаторов:
а
– ленточный питатель; б
– вибропитатель; в
– тарельчатый питатель;
г
– шнековый питатель; д
– секторный питатель; е
– гравитационный питатель
В
зависимости от способа регулирования
производительности все дозаторы делят
на механизмы с автоматическим
регулированием и без автоматического
регулирования.
В
связи с большим разнообразием
физико-химических свойств дозируемых
материалов и условий, в которых работают
дозаторы, разработаны различные
конструкции рабочих (регулирующих)
органов дозаторов, основные типы которых
показаны на рис. 46, а–е.
Контрольные
вопросы и задания
1. Расскажите
Расскажите
о классификации задающих устройств.
2. Расскажите
о классификации исполнительных
механизмов.
3. Расскажите
о классификации регулирующих органов.
4. Как
устроены и работают механические
задающие устройства?
5. Каково
назначение задающих устройств, выполненных
в виде функциональных потенциометров?
6. Как
устроены и работают дискретные задающие
устройства?
7. Какие
электромагнитные исполнительные
механизмы применяют в системах автоматики?
8. Какие
электрические муфты применяют в системах
автоматики?
9. Назовите
электродвигательные исполнительные
механизмы.
10. Как
устроены и работают гидравлические и
пневматические исполнительные механизмы?
11. Как
устроены и работают дросселирующие
регулирующие органы?
12. Как
устроены и работают дозирующие
исполнительные органы?
|
Навигация: Исполнительные механизмы и регулирующие органы Исполнительные механизмы и регулирующие органы Исполнительный механизм является конечным элементом автоматического устройства и, как правило, соединяется с регулирующим органом. Исполнительный механизм с регулирующим органом — это устройства, которые изменяют расход регулируемого агента в объекте регулирования, в данном случае в технологическом процессе изготовления бетонной смеси. В зависимости от сигнала автоматического регулятора исполнительный механизм изменяет приток или расход материала или энергии, направляемые в объект регулирования с целью уменьшения возникшего рассогласования, приближения регулируемой величины к заданному значению. Конструкции исполнительных механизмов выпускают пневматические, электрические и гидравлические. Пневматические и гидравлические исполнительные механизмы отличаются простотой конструкции, большими выходными моментами, надежностью и возможностью получать различные скорости перемещения регулирующего органа. В качестве привода электрических исполнительных механизмов используют электродвигатели переменного или постоянного тока. К недостаткам этих исполнительных механизмов следует отнести сложность регулирования скорости. Выбор того или иного исполнительного механизма зависит от типа применяемого регулятора. Исполнительный механизм выбирают с учетом величины перестановочного усилия, необходимого Для регулирующего органа. Ниже рассмотрены электрические и пневматические исполнительные механизмы, применяемые в промышленности строительных материалов. Рис. 1. Условные изображения исполнительных механизмов и регулирующих органов, работающих вместе с различными регуляторами: Электрические исполнительные механизмы перемещают различные регулирующие органы: клапаны, дроссельные заслонки, задвижки, краны и т. Промышленность выпускает однооборотные механизмы с углом поворота выходного вала не более 360° и многооборотные, валы которых делают несколько оборотов. Исполнительный механизм ДР предназначен для позиционного регулирования. Он представляет собой корпус, в котором размещен однофазный электродвигатель, присоединенный через редуктор к выходному валу. Электродвигатель может вращаться только в одну сторону; его включают контактом управляющего или дистанционного устройства, а выключают выключателем, укрепленным на выходном валу. На рис. 2,б показана электрическая схема механизма. Выключатель имеет два изолированных контакта: контакт с минимальным значением параметра и — с максимальным. Эти контакты электрически соединены с одноименными неподвижными контактами управляющего устройства. Кольцевая шина выключателя соединена с электрической сетью. Рис. 2. Исполнительный механизм типа ДР: Когда ползунок 3 выключателя, закрепленный на выходном валу механизма (на схеме редуктор не показан), находится на одном из контактов, электродвигатель работать не может. При включении переключающего устройства регулятора в положение минимума ток поступит на неподвижный контакт и, следовательно, электродвигатель начнет вращаться. Когда же ползунок сойдет с контакта 6, двигатель будет продолжать вращаться независимо от положения контакта устройства, так как ток в его обмотку продолжает подаваться через шины, замыкаемые ползунком. Двигатель остановится после полуоборота выходного вала механизма, так как ползунок выключателя сойдет с шины и окажется на контакте. Повторно двигатель включится в случае, если переключающее устройство перейдет в положение механизма. Следовательно, регулирующий орган, соединенный с данным исполнительным механизмом, может быть только в открытом или закрытом положении. Электромагнитный исполнительный механизм используют также для позиционного регулирования. Электромагниты применяют для обеспечения возвратно-поступательных перемещений регулирующих органов. Электромагнитные приводы бывают переменного и постоянного тока. Электропневматический клапан (ЭПК), показанный на рис. 3, предназначен для управления пневматическими линиями. ЭПК изготовляют в двух модификациях: «Ток открывает» (Т. о.) и «Ток закрывает» (Т. з.). Клапан Т.о. подает сжатый воздух в технологическую линию (установку) при подаче напряжения на обмотку катушки электромагнита клапана и сбрасывает воздух из нее при снятии напряжения. Действие клапана Т.з. обратно действию первого клапана. При включении тока в катушку электромагнита якорь подтягивается к неподвижному ярму 3. Вместе с якорем перемещается шток, соединенный с золотником, последний при этом поднимается вверх, открывая линию питания сжатым воздухом, соединенную с технологической установкой. Исполнительный механизм типа ПР используют вместе с электрическим регулятором, когда необходимо получать обратную связь с исполнительным механизмом. В исполнительном механизме установлен однофазный реверсивный двигатель переменного тока и реостат для получения обратной связи. Этот механизм может работать, например, в сочетании с статическим регулятором типа БР-3. Электрический исполнительный механизм типа ПР представляет собой устройство, состоящее из следующих узлов: асинхронного электродвигателя, корпуса с редуктором, концевых выключателей 3 и реостата обратной связи. Исполнительный механизм типа ПР снабжен диском, что позволяет воздействовать как на поворотный регулирующий орган, так и на поступательный. Шестерни редуктора — сменные, что позволяет регулировать скорость вращения выходного вала, создавая угловое перемещение на 180° за 10—120 с. Потребляемая мощность двигателя — 60 Вт. Вращающий момент на выходном валу — 100 кГс/м при настройке 30 с. Частями электродвигателя являются короткозамкнутый ротор и статор, закрепленный в корпусе исполнительного механизма. Рис. 3. Схема электромагнитного исполнительного механизма и клапана Электрическая схема исполнительного механизма приведена на рис. 4, б, на которой R0.с — реостат обратной связи, а КВ-1 и КВ-2 — конечные выключатели, отключающие двигатель исполнительного механизма от сети при достижении им крайних положений. Исполнительный механизм МЭК служит для перемещения регулирующих органов. Этот механизм действует от асинхронного электродвигателя с полым ротором. Электродвигатель имеет две обмотки: возбуждения и управления. Изменением напряжения на обИготке управления можно регулировать скорость вращения выходного вала исполнительного механизма. От электродвигателя вращение через соединительную муфту передается на редуктор. Рис. 4. Исполнительный механизм типа ПР: Выходной вал редуктора может вращаться на 360°. Узел реостатов и конечных выключателей скомпонован из двух реостатов по 120±5 Ом и двух конечных выключателей. Один из реостатов предназначен для обратной связи, другой — для подключения дистанционного указателя положения регулирующего органа. Конечные выключатели служат для выключения электродвигателя в крайних положениях и для ограничения – угла поворота выходного вала. Пневматические исполнительные механизмы, обладающие малой инерционностью, позволяют получать большие усилия. Эти механизмы применяют в основном для передачи поступательных движений. По принципу действия их можно разделить на две группы: поршневые и диафрагменные. Поршневые исполнительные механизмы выпускают одно- и двустороннего действия. Приводы одностороннего действия применяют в тех случаях, когда возвратное движение поршня соверша ется вхолостую (без нагрузки). Поршневой пневматический исполнительный механизм односто роннего действия состоит из цилиндра, штока с поршнем, возвратной пружины, уплотняющих устройств, крышки и штуцера. Наружный конец штока соединяют с регулирующим органом. Рис. 5. Схемы исполнительных механизмов: Пневматический исполнительный механизм работает следующим образом. Через отверстие штуцера в полость цилиндра подается сжатый воздух. Последний давит на поршень, который, перемещаясь вправо, выполняет необходимую работу, одновременно сжимая пружину. Полость II цилиндра должна свободно сообщаться с атмосферой, в противном случае при движении поршня вправо в цилиндре может возникнуть противодавление воздуха, а при движении поршня влево — вакуум. Для обеспечения возвратного движения поршня следует открыть доступ воздуха из полости в атмосферу. В исходное положение поршень и связанный с ним регулируемый орган возвращается под действием сжатой пружины. На рис. 5,б приведена схема пневматического исполнительного механизма двустороннего действия, когда воздух можно подавать к обеим полостям цилиндра. Мембранные исполнител-ьные механизмы. Для передачи движений с небольшим ходом в пневматических системах применяют мембранные исполнительные механизмы. Диаметр этих пневмоприводов составляет 125—500 мм при ходе штока от 6 до 100 мм. Принцип действия пневматического мембранного исполнительного механизма состоит в том, что резиновая мембрана, закрепленная между крышками, может прогибаться в зависимости от разностей давлений, создаваемых с одной стороны воздухом, с другой стороны под действием спиральной пружины. Эта пружина одним концом упирается в мембрану при помощи металлического диска, а другим концом во втулку и гайку. Давление воздуха на мембрану подается через отверстие. К металлическому диску прикреплен шток привода, который соединен со штоком регулирующего органа. При отсутствии давления воздуха на мембрану регулирующий орган под действием пружины поднимается вверх. У большинства исполнительных механизмов давление воздуха на мембрану меняется в пределах от 0,2 до 1 кг/см2, что обеспечивает полный ход регулирующего органа. Регулирующий орган непосредственно воздействует на приток или расход регулирующего агента в объекте регулирования. Работа этого органа заключается в дросселировании потока носителя энергии или регулирующего агента путем увеличения или уменьшения проходного сечения. Регулирующий орган состоит из клапана, шибера и заслонки, которые устанавливают на трубопроводах, а также на питателях, точках и т. п. Корпус регулирующего органа выбирают, исходя из условий прочности, т. е. величины рабочего давления, а также температуры и коррозионное регулируемой среды. Наиболее распространены из регулирующих органов регулирующие клапаны. Регулирующие клапаны выпускают односедельные — с одним золотником и двухседельные — с двумя золотниками. Рис. 6. Схемы регулирующих органов: Рис. 7. Схемы регулирующих клапанов Для перестановки золотника односедельных клапанов требуются большие усилия. Давление же на двухседельные клапаны почти уравновешено, так как один золотник испытывает усилие на открытие клапана, а другой — такое же усилие на его закрытие. В результате эти два усилия компенсируются, будучи направленными в разные стороны, и исполнительный механизм, соединенный с клапаном, преодолевает только силы трения. Поэтому двухседельные клапаны, как правило, применяют в условиях высоких давлений и большой производительности. Похожие статьи: Навигация:
Главная → Справочник → Статьи → Блог → Форум
|
|
|
 п. Они работают в комплекте с электрическими и электронными регуляторами. В качестве приводов к этим механизмам применяют трехфазные и однофазные асинхронные электродвигатели.
п. Они работают в комплекте с электрическими и электронными регуляторами. В качестве приводов к этим механизмам применяют трехфазные и однофазные асинхронные электродвигатели.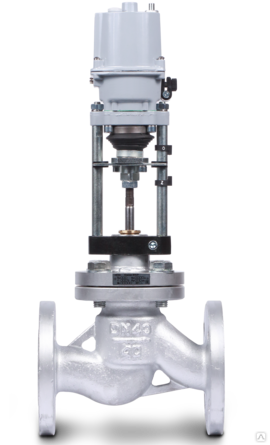 Вторая кольцевая шина выключателя присоединена к обмотке электродвигателя.
Вторая кольцевая шина выключателя присоединена к обмотке электродвигателя. Остановить исполнительный механизм ДР в промежуточном положении невозможно.
Остановить исполнительный механизм ДР в промежуточном положении невозможно.
 Выходной вал электродвигателя может вращаться в двух направлениях в зависимости от фазы подаваемого тока.
Выходной вал электродвигателя может вращаться в двух направлениях в зависимости от фазы подаваемого тока. С целью уменьшения выбега выходного вала в механизме применен электромагнитный тормоз. Для наблюдения за положением выходного вала имеется шкала с делениями в градусах.
С целью уменьшения выбега выходного вала в механизме применен электромагнитный тормоз. Для наблюдения за положением выходного вала имеется шкала с делениями в градусах.

 При подаче на мембрану сжатого воздуха шток перемещается вниз. При помощи диска и шкалы можно наблюдать за положением регулирующего органа. Величину предварительного сжатия пружины устанавливают гайкой.
При подаче на мембрану сжатого воздуха шток перемещается вниз. При помощи диска и шкалы можно наблюдать за положением регулирующего органа. Величину предварительного сжатия пружины устанавливают гайкой. По роду действия клапаны делят на клапаны прямого действия и обратного. Клапаном, прямого действия называют такой, у которого золотник при движении вниз уменьшает проходное сечение. У клапана обратного действия проходное сечение уменьшается при движении золотника вверх.
По роду действия клапаны делят на клапаны прямого действия и обратного. Клапаном, прямого действия называют такой, у которого золотник при движении вниз уменьшает проходное сечение. У клапана обратного действия проходное сечение уменьшается при движении золотника вверх.
|
Навигация:
Топ: Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь. Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие… Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы…
Интересное: Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными… Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений… Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов…
Дисциплины:
|
⇐ ПредыдущаяСтр 13 из 23Следующая ⇒
Исполнительные механизмы предназначены для перемещения регулирующих органов в соответствии с командными сигналами, поступающими от регулирующих и управляющих устройств. Исполнительные механизмы классифицируют по ряду признаков: – по виду используемой энергии: электрические, пневматические, гидравлические и комбинированные; – по конструктивному исполнению: мембранные и поршневые; – по характеру обратной связи — периодического и непрерывного действия. Электрическим исполнительным механизмом в системах управления называют устройство, предназначенное для перемещения рабочего (регулирующего) органа в соответствии с сигналами, поступающими от управляющего устройства.
Электрический исполнительный механизм состоит из электропривода, редуктора, узла обратной связи, датчика указателя положения выходного элемента и конечных выключателей. В качестве электропривода в исполнительных механизмах используются либо электромагниты, либо электродвигатели с понижающим редуктором для снижения скорости перемещения выходного элемента до величины, обеспечивающей возможность непосредственного соединения этого элемента (вала или штока) с рабочим органом. С помощью конечных выключателей производится отключение электропривода исполнительного механизма при достижении рабочим (регулирующим) органом своих конечных положений во избежание возможных повреждений механических звеньев. Электродвигательные исполнительные механизмы состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть). Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Простота схемы, малое число элементов, участвующих в формировании регулирующего воздействия, и высокие эксплуатационные свойства сделали исполнительные механизмы с управляемыми двигателями основой для создания исполнительных устройств современных промышленных систем автоматического регулирования. Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением. Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. Для получения средней переменной скорости перемещения выходного органа исполнительного механизма при контактном управлении широко используется импульсный режим работы его электродвигателя. В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяющие относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна. Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные можно подразделять также по следующим признакам. По назначению: с вращательным движением выходного вала — однооборотные; с вращательным движением выходного вала — многооборотные; с поступательным движением выходного вала — прямоходные.
Прямоходные механизмы имеют поступательное движение выходного штока и оцениваются усилием на штоке, величиной полного хода штока, временем его перемещения на участке полного хода, а также по скорости движения выходного органа в оборотах в минуту для однооборотных и многооборотных и в миллиметрах в секунду для прямоходных механизмов. Конструкция исполнительных механизмов позиционного действия такова, что с их помощью рабочие органы можно устанавливать только в определенные фиксированные положения. Чаще всего таких положений бывает два: «открыто» и «закрыто». Исполнительные механизмы пропорционального действия конструктивно таковы, что обеспечивают в заданных пределах установку рабочего органа в любое промежуточное положение в зависимости от величины и длительности управляющего сигнала.
Рис. 80. Механизмы исполнительные электрические Пневматические и гидравлические исполнительные механизмы, использующие энергию сжатого воздуха и минеральных масел (несжимаемой жидкости), делят на самостоятельные и на работающие совместно с усилителями. К самостоятельным механизмам относят цилиндры с поршнем и штоком одно- и двустороннего действия. По виду используемой энергии исполнительные механизмы делятся на пневматические, гидравлические и электрические. Пневматические исполнительные механизмы бывают мембранными и поршневыми. Мембранный исполнительный механизм состоит из корпуса головки 1, мембраны из прорезиненной ткани 2, металлического диска 3, штока. 4, жестко соединенного с диском, и пружины 5.
Рис. 81. Схема мембранного и поршневого исполнительных механизмов
При отключении регулируемой величины от заданного значения давление воздуха Р, поступающего от пневматического регулятора в полость над мембраной и диском, изменяется. В тех случаях, когда мембранный исполнительный механизм предназначен для управления регулирующим клапаном, их конструктивно объединяют. Поршневой исполнительный механизм состоит из цилиндра 1 с поршнем 2, шток которого 3 соединяется с регулирующим органом (РО). В зависимости от того, в какую полость цилиндра (А или Б) будет поступать управляющий сигнал от регулятора, поршень со штоком будет перемещаться либо вправо, либо влево. Пневматические средства управления и регулирования удовлетворяют самым жёстким требованиям пожаро- и взрывобезопасности, могут работать в системах газоснабжения и применяются для автоматизации производственных процессов.
Односедельные клапаны имеют одностороннее действие давления среды. Оно выражается в «затягивании» или «отжатии» самого седла при изменении направления движения среды через регулирующий орган. Такой эффект является нежелательным, так как нарушает процесс регулирования. Для устранения этого используют двухседельный клапан, которые считаются разгруженными. Гидравлические исполнительные механизмы предназначены для преобразования сигнала, поступающего от гидравлического регулятора в перемещение регулирующего органа. Выпускается два типа гидравлических исполнительных механизмов: прямого хода и кривошипные. По принципу действия они аналогичны пневматическому поршневому исполнительному механизму. ⇐ Предыдущая891011121314151617Следующая ⇒ Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства. Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции… Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого… Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ — конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой…
|
 ..
..



 Поэтому исполнительные механизмы с контактным управлением относят к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.
Поэтому исполнительные механизмы с контактным управлением относят к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.


 Принцип действия этих двух видов механизмов схож между собой.
Принцип действия этих двух видов механизмов схож между собой. Шток перемещается либо вниз (при увеличении давления), либо вверх (при уменьшении давления). Шток, связанный с регулирующим органом (РО) непосредственно или через рычаг, перемещает его в новое положение.
Шток перемещается либо вниз (при увеличении давления), либо вверх (при уменьшении давления). Шток, связанный с регулирующим органом (РО) непосредственно или через рычаг, перемещает его в новое положение. Степень открытия сечения клапана пропорциональна давлению воздуха Р, подаваемого на мембранный механизм.
Степень открытия сечения клапана пропорциональна давлению воздуха Р, подаваемого на мембранный механизм.
 ..
..Исполнительные устройства
Исполнительные устройства
Исполнительные устройства предназначены для преобразования управляющих (командных) сигналов в регулирующие воздействия на объект управления. Практически все виды воздействий сводятся к механическому, т. е. к изменению величины перемещения, усилия к скорости возвратно-поступательного или вращательного движения. Исполнительные устройства являются последним звеном цепи автоматического регулирования и в общем случае состоят из блоков усиления, исполнительного механизма, регулирующего и дополнительных (обратной связи, сигнализации конечных положений и т. п.) органов. В зависимости от условий применения рассматриваемые устройства могут существенно различаться между собой. К основным блокам исполнительных устройств относят исполнительные механизмы и регулирующие органы.
п.) органов. В зависимости от условий применения рассматриваемые устройства могут существенно различаться между собой. К основным блокам исполнительных устройств относят исполнительные механизмы и регулирующие органы.
Исполнительные механизмы классифицируют по ряду признаков: – по виду используемой энергии — электрические, пневматические, гидравлические и комбинированные; – по конструктивному исполнению — мембранные
и поршневые; – по характеру обратной связи — периодического и
непрерывного действия.
Электрические исполнительные механизмы являются наиболее распространенными и включают в себя электродвигатели и электромагнитный привод. В общем случае эти механизмы состоят из электродвигателя, редуктора, тормоза, соединительных муфт, контрольно-пусковой аппаратуры и специальных устройств для перемещения рабочих органов.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В исполнительных механизмах применяют электродвигатели переменного (в основном асинхронные с короткозамкнутым ротором) и постоянного тока. Наряду с электродвигателями массового изготовления используют и специальные конструкции позиционного и пропорционального действия, с контактным и бесконтактным управлением.
Наряду с электродвигателями массового изготовления используют и специальные конструкции позиционного и пропорционального действия, с контактным и бесконтактным управлением.
По характеру изменения положения выходного органа электродвигательные исполнительные механизмы могут быть постоянной и переменной скорости, а также шаговыми.
По назначению их делят на одно-оборотные (до 360°), многооборотные и прямоходные.
Рис. 10.21. Пропорциональный исполнительный механизм
Пропорциональный исполнительный механизм (рис. 10.21) по конструкции похож на двухпозиционный двигатель. Однако возможность пропорционального регулирования достигается установкой на одном валу двух электродвигателей. Первый вращает вал в одном направлении, второй — в противоположном. Кроме того, исполнительный механизм включает в себя редуктор, муфту и зубчатую рейку. Пропорциональное регулирование (например, газового вентиля в дорожных ремонтерах) обеспечивается потенциометром, используемым для создания обратной связи в схеме.
Электродвигательные исполнительные механизмы применяют в основном при усилии не более 53 кН.
Рис. 10.22. Электромагнитный управляющий элемент
Рис. 10.23. Электромашинный толкатель
Электромагнитный привод используется для управления механизмами в гидро- и пневмоприводах, а также различными вентилями и заслонками. Принцип работы этого привода (рис. 10.22) состоит в поступательном перемещении на величину L металлического якоря относительно электромагнитного вала катушки, расположенной в корпусе. Различают электромагнитные приводы одно- и двустороннего действия. В первом исполнении возврат якоря в исходное положение производится с помощью пружины, во втором — изменением направления управляющего сигнала. По типу приложения нагрузки привод бывает периодического и непрерывного действия. С его помощью осуществляется релейное (открыто — закрыто) и линейное управление.
Электромагнитные вентили (для открывания в трубопроводах клапанов) по виду используемых чувствительных элементов делят на поршневые и мембранные. При значительных усилиях и длине перемещений используют электромашинный толкатель (рис. 10.23). Принцип его действия основан на поступательном перемещении в обе стороны оси — винта относительно вращающейся, однако закрепленной, гайки. Вращение гайки, являющейся одновременно ротором, производится при включении в цепь питания трехфазной статорной обмотки. На конце винта расположен прямой участок, представляющий собой шток (толкатель), перемещающийся в направляющих и воздействующий на конечный выключатель управляемого механизма. При необходимости толкатель работает с установленным редуктором.
При значительных усилиях и длине перемещений используют электромашинный толкатель (рис. 10.23). Принцип его действия основан на поступательном перемещении в обе стороны оси — винта относительно вращающейся, однако закрепленной, гайки. Вращение гайки, являющейся одновременно ротором, производится при включении в цепь питания трехфазной статорной обмотки. На конце винта расположен прямой участок, представляющий собой шток (толкатель), перемещающийся в направляющих и воздействующий на конечный выключатель управляемого механизма. При необходимости толкатель работает с установленным редуктором.
Пневматические и гидравлические исполнительные механизмы, использующие энергию сжатого воздуха и минеральных масел (несжимаемой жидкости), делят на самостоятельные и на работающие совместно с усилителями. Так как принцип действия этих двух видов механизмов схож между собой, рассмотрим их совместно.
К самостоятельным механизмам относят цилиндры с поршнем и штоком одно- и двустороннего действия (см. гл. 1).
гл. 1).
Исполнительные механизмы, объединенные с усилителями, имеют различные конструктивные решения, часть из которых рассмотрим ниже.
Основным в таком приводе является регулирование скорости движения штока, выполняемое с дроссельным или объемным регулированием.
При управлении с дроссельным регулированием используют золотниковые распределители или «сопло-заслонку». Работа гидропривода с дроссельным регулированием позволяет изменять величину перекрытия отверстий (т. е. дросселировать), через которые жидкость попадает в рабочий цилиндр (рис. 10.24, а). Перемещение золотниковой пары вправо позволяет маслу из напорной линии через канал попасть в полость А рабочего цилиндра и поршень будет перемещаться вправо. При этом масло, находящееся в полости Б, будет сливаться через канал в бак. Перемещение золотника влево переместит в ту же сторону и поршень, а отработавшее масло будет сливаться из полости А в бак через канал. При расположении золотниковой пары в среднем положении (так, как показано на рисунке) оба канала, соединяющих золотниковое устройство с рабочим цилиндром, перекрыты и поршень неподвижен.
Рис. 10.24. Поршневые исполнительные механизмы с усилителями
Работа пневмопривода с помощью «сопло-заслонки» (рис. 10.24, б) производится путем изменения давления в рабочем цилиндре и перемещения поршня на величину у за счет перемещения регулируемой заслонки. Через дроссель постоянного сопротивления воздух подается в камеру под постоянным давлением Рн. В то же время давление в камере зависит от расстояния х между соплом (дросселем переменного сопротивления) и заслонкой, так как с увеличением этого расстояния давление снижается и наоборот. Воздух под давлением Р поступает из камеры в нижнюю полость цилиндра, а в верхней расположена пружина, создающая за счет силы упругой деформации противоположное давление, равное Рн. Созданная разность давлений позволяет перемещать поршень вверх или вниз. Вместо пружины в цилиндр может подаваться воздух или рабочая жидкость под давлением Рн. В соответствии с этим поршневые исполнительные механизмы называются механизмами одно-или двустороннего действия и обеспечивают усилия до 100 кН при перемещении поршня до 400 мм.
При управлении с дроссельным регулированием входным управляющим сигналом является величина перемещения золотниковой пары или открытия дросселя, а выходным — перемещение поршня в гидроцилиндре.
Гидро- и пневмопривод обеспечивают объекту управления возвратно-поступательное и вращательное движение.
При управлении с объемным регулированием управляющими устройствами являются насосы переменной производительности, выполняющие и функции усилительно-исполнительного механизма. Входным сигналом является подача насоса. Большое распространение в качестве гидравлического исполнительного механизма имеют аксиально-поршневые двигатели, обеспечивающие плавное изменение угловой скорости выходного вала и количества подаваемой жидкости.
Наряду с рассмотренными выше поршневыми устройствами пневматические исполнительные механизмы выполняют мембранными, сильфонными и лопастными.
Мембранные устройства делят на беспружинные и пружинные. Беспружинные мембранные устройства (рис. 10.25, а) состоят из рабочей полости А, в которую поступает управляющий воздух под давлением Ру, и эластичной резиновой мембраны, соединенной посредством жестких центров со штоком. Возвратно-поступательное движение штока осуществляется путем подачи в подмембранную полость Б сжатого воздуха с давлением Ро и за счет перемещения мембраны. Наиболее распространенными являются мембранно-пружинные устройства (рис. 10.25, б), в которых результирующая сила Рр уравновешивается давлением на мембрану управляющего воздуха Ру и силой упругой деформации пружины 4—Fn. При необходимости совершать поворотные движения в прямоходных исполнительных механизмах шток соединяется с шарнирно-рычажной передачей, показанной на рис. 10.25, б штриховой линией.
10.25, а) состоят из рабочей полости А, в которую поступает управляющий воздух под давлением Ру, и эластичной резиновой мембраны, соединенной посредством жестких центров со штоком. Возвратно-поступательное движение штока осуществляется путем подачи в подмембранную полость Б сжатого воздуха с давлением Ро и за счет перемещения мембраны. Наиболее распространенными являются мембранно-пружинные устройства (рис. 10.25, б), в которых результирующая сила Рр уравновешивается давлением на мембрану управляющего воздуха Ру и силой упругой деформации пружины 4—Fn. При необходимости совершать поворотные движения в прямоходных исполнительных механизмах шток соединяется с шарнирно-рычажной передачей, показанной на рис. 10.25, б штриховой линией.
Мембранные исполнительные механизмы применяют для управления регулирующими органами с перемещением штока до 100 мм и допустимым давлением в рабочей полости до 400 кПа.
Сильфонные устройства (рис. 10.25, в) применяют редко. Они состоят из подпружиненного штока, перемещающегося вместе с герметичной гофрированной камерой за счет давления управляющего воздуха Ру. Их используют в регулирующих органах с перемещениями до 6 мм.
Их используют в регулирующих органах с перемещениями до 6 мм.
Рис. 10.25. Пневматические исполнительные механизмы
В лопастных исполнительных устройствах (рис. 10.25, г) прямоугольная лопасть перемещается внутри камеры за счет давления управляющего воздуха Ру, поступающего попеременно в одну или другую полость камеры. Эти устройства используют в исполнительных органах с углом поворота затвора на 60° или 90°.
В связи с тем, что практически ни один из приведенных приводов автоматических систем управления не применяют в настоящее время без ряда других элементов, служащих для регулирования привода, то в основном используют комбинированные исполнительные механизмы (электромагнитные золотниковые распределители пневмо- и гидропривода, электромагнитные муфты с электродвигателями и т. д.).
При выборе исполнительных устройств учитывают требования, предъявляемые к ним условиями эксплуатации. Основными из них являются: вид применяемой вспомогательной энергии, величина и характер требуемого выходного сигнала, допускаемая инерционность, зависимость рабочих характеристик от внешних влияний, надежность работы, габариты, масса и т. п.
п.
Электрические линейные приводы | Tolomatic
В Tolomatic есть все, что вам нужно для электрического управления линейным перемещением, а также широкий выбор бесштоковых и стержневых электрических линейных приводов. Дополните свою приводную систему либо сервоприводом, либо шаговым двигателем.
Загрузить брошюру по электрическим приводам
Найдите продукты по модели или ключевому слову
Электрические линейные приводы
Сузьте выбор
Гигиенические электрические стержневые приводы RSH
Вся конструкция из нержавеющей стали 316 и степень защиты IP69K обеспечивают электрический стержневой привод, который идеально подходит для пищевых продуктов, напитков и фармацевтических машин. Усилие до 7943 фунтов силы (35,3 кН).
Электрические линейные приводы RSA-ST
Замените пневматические или гидравлические цилиндры с повышенной производительностью и увеличенным сроком службы. Усилие до 4040 фунтов силы (40,3 кН).
Усилие до 4040 фунтов силы (40,3 кН).
RSA-HT Сверхмощные электрические стержневые приводы большой мощности
Сверхмощные электрические стержневые приводы большой мощности идеально подходят для установки больших двигателей. Замените гидравлические цилиндры на RSA-HT с роликовым винтом в сложных условиях. Усилие до 13 000 фунтов силы (58,0 кН).
Линейные сервоприводы IMA
Электрический штоковый привод, интегрированный с серводвигателем в единой компактной конструкции, которая интегрируется с приводами и аксессуарами сторонних производителей. Усилие до 6900 фунтов силы (30,6 кН).
Гигиенические встроенные сервоприводы IMA-S из нержавеющей стали
Объединяет гигиеничный электропривод и двигатель в одном корпусе. Он имеет степень защиты IP69K, изготовлен из нержавеющей стали 316 и работает с приводами и аксессуарами сторонних производителей. Усилие до 2500 фунтов силы (11,1 кН).
Электрические линейные приводы RSX Extreme Force
Электрические линейные приводы гидравлического класса с ролико-винтовой передачей, обеспечивающие экстремальные усилия, точность и длительный срок службы. Идеально подходит для замены гидравлики. Усилие до 50 000 фунтов силы (222,2 кН).
RSX096 Электрические линейные приводы для прессов
Электрический линейный привод с высоким усилием, который более эффективен, надежен и точен, чем гидравлические цилиндры, в прессовых приложениях с усилием до 40 000 фунтов силы (177,93 кН).
Электроприводы ERD-SS2 из нержавеющей стали со встроенным двигателем
Электрический штоковый привод, полностью выполненный из нержавеющей стали, который сочетает в себе двигатель в защитном корпусе для решения «все в одном» привода и двигателя в корпусе со степенью защиты IP69k. Усилие до 320 фунтов силы (1,4 кН).
Роликовые винты
Прецизионно отшлифованные планетарные роликовые винты обеспечивают более высокое усилие, эффективную работу и более длительный срок службы машины.
Линейные ползунковые приводы GSA
Конструкция, сочетающая электрический стержневой привод с направляющими стержнями, монтажными блоками и подшипниками. Идеально подходит для приложений, требующих направления и поддержки груза. Сил до 950 фунтов силы (4,2 кН).
Сервопривод IMA для пищевых продуктов
Конструкция для пищевых продуктов сочетает электрический стержневой привод и двигатель в одной конструкции с белым эпоксидным покрытием для сред с промывкой. Интегрируется со сторонними накопителями и аксессуарами. Усилие до 6900 фунтов силы (30,6 кН).
Винтовые приводы MXE-P
Электрический бесштоковый привод с винтовым приводом и системой профилированных направляющих подшипников для больших нагрузок и высоких изгибающих моментов. Нагрузка до 1290 фунтов (586 кг).
ServoChoke® SVC Электрический привод дроссельной заслонки / оператор
Электрический привод дроссельной заслонки, предназначенный для управления дроссельной заслонкой в MPD или установках дросселирования и глушения. Это все в одном электрическом стержневом приводе и конструкции двигателя. Сертифицированы по ATEX, IECEx и CID1.
Это все в одном электрическом стержневом приводе и конструкции двигателя. Сертифицированы по ATEX, IECEx и CID1.
Линейный привод MXB-P для тяжелых условий эксплуатации
Линейный привод, использующий профилированный рельсовый подшипник и ременную передачу для перемещения тяжелых грузов на высоких скоростях. Нагрузка до 1290 фунтов (586 кг).
Винтовые приводы MXE-S
Бесштоковая электрическая конструкция с винтовым приводом и прочным держателем подшипников для длительного срока службы, идеально подходит для умеренных нагрузок. Нагрузка до 520 фунтов (236 кг).
Неуправляемые приводы с ременным приводом MXB-U
Привод с ременным приводом предназначен для приложений, в которых нагрузки направляются и поддерживаются извне, а также требуются высокие скорости. Усилие до 420 фунтов силы (1,9 кН).
Линейный привод с ременным приводом MXB-S
Компактный линейный привод с ременным приводом для использования в приложениях, требующих переноса легкой и средней нагрузки с направляющей и высокой скоростью. Нагрузка до 520 фунтов (236 кг).
Нагрузка до 520 фунтов (236 кг).
Линейные приводы с шарико-винтовой передачей B3S
Линейные приводы с шарико-винтовой передачей Tolomatic B3S имеют закрытый шарикоподшипник, который выдерживает большие нагрузки и высокие изгибающие моменты, обеспечивая длительный срок службы.
Линейные приводы с ременным приводом B3W
Линейные приводы с ременным приводом B3W имеют закрытый шарикоподшипник для больших нагрузок, высоких изгибающих моментов и длительного срока службы.
TRS двухпрофильный рельсовый столик закрытой конструкции
Прочный столик с двойными профильными рельсами и механически обработанным основанием обеспечивает очень жесткий и точный привод. Многоосевые конфигурации являются стандартными и идеально подходят для добавления 7-й степени свободы для роботов. Нагрузка до 1360 фунтов (615 кг).
Бесштоковые винтовые приводы BCS
Бесштоковые винтовые приводы Tolomatic BCS обеспечивают хорошее отслеживание и превосходную поддержку нагрузки. Просмотр сведений о продукте.
Просмотр сведений о продукте.
Встроенный серводвигатель/привод/контроллер ACSI
Встроенный серводвигатель Tolomatic ACSI представляет собой экономичное решение для автоматизации дополнительных осей движения, доступное в вариантах протокола Basic, EtherNet/IP, Modbus TCP.
Сервосистемы Nidec
Технологическое решение: электрический линейный привод Tolomatic и серводвигатели и приводы Nidec
ServoPlace™ Прецизионная установка гаек
Этот высокоскоростной электропривод предназначен для точной установки гаек и болтов (шпилек) при рельефной сварке для повышения производительности и пропускной способности.
Электрический линейный привод SLS
В системе наведения электрических линейных направляющих SLS используются циркулирующие подшипники на шлифованных стальных валах для увеличения срока службы.
Электроприводы | SMC Corporation of America
Электрические линейные приводы могут толкать, тянуть или передавать рабочие нагрузки совершенно иначе, чем пневматические приводы. Пневматические приводы полагаются на относительно грубые устройства, такие как резиновые подушки или амортизаторы, регуляторы давления и фитинги для ограничения потока в порту для управления их движением. Напротив, электрический привод использует двигатель с электронным управлением и шарико-винтовую передачу для обеспечения точного профиля движения посредством ускорения, скорости и замедления. Кроме того, контроллер способен интегрировать несколько «остановочных» положений вдоль хода привода с высокой точностью и воспроизводимостью.
Пневматические приводы полагаются на относительно грубые устройства, такие как резиновые подушки или амортизаторы, регуляторы давления и фитинги для ограничения потока в порту для управления их движением. Напротив, электрический привод использует двигатель с электронным управлением и шарико-винтовую передачу для обеспечения точного профиля движения посредством ускорения, скорости и замедления. Кроме того, контроллер способен интегрировать несколько «остановочных» положений вдоль хода привода с высокой точностью и воспроизводимостью.
Помимо управления движением, электрические приводы экономят затраты на электроэнергию, программируя все движения без необходимости в инфраструктуре сжатого воздуха. Утечки устраняются. Фильтрация не нужна.
Флагманская линейка электроприводов SMC, серия LE, разработана с акцентом на простоту установки и эксплуатации; параметры функции предустановлены, расширены опцией настройки «Простой режим», чтобы обеспечить быструю работу. Серия LE доступна в широком диапазоне типов, включая: ползунки, стержневые и направляющие стержни, скользящие столы, поворотные, захватные и миниатюрные. Аксессуары включают в себя контроллеры приводов и шлюзы.
Аксессуары включают в себя контроллеры приводов и шлюзы.
Инструкции по эксплуатации
Видео по электрическим приводам
Видео по JXC91
Приводы с безбатарейными абсолютными энкодерами
Компания SMC представила линейку приводов, приводимых в действие шаговыми двигателями 24 В постоянного тока, оснащенными безбатарейными абсолютными энкодерами. Абсолютный энкодер предлагает данные о положении при включении питания, избегая процедуры возврата в исходное положение, которая требуется инкрементному энкодеру. Наш безбатарейный абсолютный энкодер сочетает датчики ориентации с вращающимися колесами разного размера, что позволяет определять положение. Эта электромеханическая конструкция исключает использование батареи и связанные с ней ограничения на импорт и утилизацию, характерные для традиционных абсолютных энкодеров. Безбатарейное решение также не имеет ограничений по сохранению памяти при длительном отключении питания.
Слайдеры
Электропривод бесштокового типа имеет платформу для крепления нагрузки, расположенную над шарико-винтовой передачей или ременной передачей. Преимуществом шарико-винтовой передачи является лучшая повторяемость позиционирования по сравнению с ременными приводами. Ременной привод обеспечивает более экономичное предложение.
Преимуществом шарико-винтовой передачи является лучшая повторяемость позиционирования по сравнению с ременными приводами. Ременной привод обеспечивает более экономичное предложение.
Серводвигатели переменного тока
Аналогичен типу Slider, но использует серводвигатель переменного тока вместо двигателя постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Драйверы имеют импульсный вход, с опциями инкрементного и абсолютного энкодера и 17- или 18-битным разрешением.
*** В настоящее время у нас большие сроки поставки двигателей типа «T». Пожалуйста, проконсультируйтесь с вашим представителем SMC по поводу альтернатив.***
Шток и направляющий шток
Электропривод штокового типа имеет известную форму штокового цилиндра, подходящую для толкания, вытягивания, подъема и прессования. Тип направляющего стержня включает в себя стержни для противодействия вращательным силам вместо привода и двигателя, а также для сопротивления ударным и длительным боковым нагрузкам.
Сервопривод переменного тока
Аналогичен типу со стержнем и направляющим стержнем, за исключением того, что в нем используется серводвигатель переменного тока вместо двигателя постоянного тока. Серводвигатель переменного тока обеспечивает более высокую скорость и ускорение, а также улучшенную вертикальную нагрузку. Драйверы относятся к импульсному типу ввода, с опциями инкрементного и абсолютного энкодера и 17- или 18-битным разрешением.
*** В настоящее время у нас большие сроки поставки двигателей типа «T». Пожалуйста, проконсультируйтесь с вашим представителем SMC по поводу альтернатив.***
Скользящие столы
LES и LESH включают в себя рабочий стол, линейную направляющую и линейный шариковый винт с приводом от двигателя. Рабочий стол предлагает верхнюю и переднюю опорные поверхности для груза. Под ним находится линейная направляющая, обеспечивающая точность позиционирования и поддерживающая моментную нагрузку.
Поворотный
Поворотные электрические приводы имеют вращающийся рабочий стол, расположенный над кожухом для двигателя и трансмиссии. Доступны три различных размера двигателя/стола, каждый из которых предлагает базовый вариант и вариант с высоким крутящим моментом. Кроме того, каждый размер предлагает четыре варианта угла поворота, в том числе 90°, 180°, 310/320° и непрерывное вращение.
Доступны три различных размера двигателя/стола, каждый из которых предлагает базовый вариант и вариант с высоким крутящим моментом. Кроме того, каждый размер предлагает четыре варианта угла поворота, в том числе 90°, 180°, 310/320° и непрерывное вращение.
Электрические захваты
Серия электрических захватов SMC включает три серии (LEHZ, LEHZJ и LEHF) с двумя пальцами. LEHS доступен с тремя пальцами. Пылезащитные чехлы, низкопрофильные пальцы и варианты с длинным ходом — вот некоторые из опций серии. Трехпальцевый тип идеально подходит для удержания круглых заготовок. Преимущества электрических захватов включают регулируемое усилие захвата, функцию предотвращения падения и возможность распознавания различных размеров и вывода результатов измерения длины.
Миниатюрный
Семейство мини-электрических приводов LEP включает стержневой привод и привод с подвижным столом. Каждая конструкция мини-электропривода построена на одних и тех же двигателях, приводах и корпусах. Каждая модель легкая, менее 1-1/2 фунта, и достаточно компактна, чтобы поместиться на ладони. Миниатюрный электропривод LAT3 Card Motor размером с кредитную карту и высотой всего 9 мм. Повторяемость позиционирования составляет ±5 мкм при рабочей частоте до 500 циклов в минуту.
Каждая модель легкая, менее 1-1/2 фунта, и достаточно компактна, чтобы поместиться на ладони. Миниатюрный электропривод LAT3 Card Motor размером с кредитную карту и высотой всего 9 мм. Повторяемость позиционирования составляет ±5 мкм при рабочей частоте до 500 циклов в минуту.
Контроллеры и драйверы
Контроллеры и драйверы, необходимые для нашего семейства электрических приводов. Вы найдете контроллеры шаговых двигателей, серводвигателей и карт двигателей, а также шлюзы Fieldbus 24 В постоянного тока и сервоприводы переменного тока.
Изделия для чистых помещений
Электропривод ползункового типа серии LEF отличается низким профилем высотой 46 мм (LEF16). Основной корпус привода может быть установлен без снятия каких-либо внешних компонентов, таких как крышка, что упрощает установку. Стандартная уплотнительная лента закрывает направляющую, шарико-винтовую передачу и ремень, предотвращая разбрызгивание смазки и внешних инородных тел и попадание их в LEF. Доступны два типа приводов: шариковый винт или зубчатый ремень. Доступные двигатели включают серводвигатель с шарико-винтовой передачей или шаговый двигатель с ременным приводом. При заказе LEF вместе с контроллером в контроллере предварительно задаются начальные данные привода, что позволяет быстро запустить его в «простом режиме».
Доступны два типа приводов: шариковый винт или зубчатый ремень. Доступные двигатели включают серводвигатель с шарико-винтовой передачей или шаговый двигатель с ременным приводом. При заказе LEF вместе с контроллером в контроллере предварительно задаются начальные данные привода, что позволяет быстро запустить его в «простом режиме».
что это такое, определение, виды и как это работает
– Progressive Automations
Привод – это часть устройства или машины, которая помогает ему совершать физические движения путем преобразования энергии, часто электрической, воздушной или гидравлической, в механическую силу. Проще говоря, это компонент любой машины, обеспечивающий движение.
Иногда, чтобы ответить на вопрос, что делает актуатор, процесс сравнивают с функционированием человеческого тела. Подобно мышцам в теле, которые позволяют преобразовывать энергию в какую-либо форму движения, например движение рук или ног, приводы работают в машине для выполнения механического действия.
Приводы присутствуют почти в каждой машине вокруг нас, от простых электронных систем контроля доступа, вибратора в вашем мобильном телефоне и бытовой технике до транспортных средств, промышленных устройств и роботов. Типичными примерами приводов являются электродвигатели, шаговые двигатели, винтовые домкраты, электрические стимуляторы мышц в роботах и т. д.
Просмотреть все приводы
Как работает линейный привод?
Привод — это устройство, которое преобразует энергию, которая может быть электрической, гидравлической, пневматической и т. д., в механическую таким образом, чтобы ею можно было управлять. Количество и характер подводимой энергии зависят от вида преобразуемой энергии и функции исполнительного механизма. Электрические и пьезоэлектрические приводы, например, работают на входе электрического тока или напряжения, для гидроприводов — его несжимаемой жидкости, а для пневматических приводов — воздуха. На выходе всегда механическая энергия.
Приводы — это не то, о чем вы будете читать каждый день в СМИ, в отличие от искусственного интеллекта и машинного обучения. Но реальность такова, что он играет решающую роль в современном мире почти так же, как никакое другое устройство, когда-либо изобретенное.
В системах промышленной мехатроники, например, они несут исключительную ответственность за то, чтобы устройство, такое как роботизированная рука, могло двигаться при подаче электрического сигнала. Ваш автомобиль использует приводы в системе управления двигателем для регулировки воздушных заслонок по крутящему моменту и оптимизации мощности, скорости холостого хода и управления подачей топлива для идеального сгорания.
Приводы — это не то, о чем вы будете читать каждый день в СМИ, в отличие от искусственного интеллекта и машинного обучения. Но реальность такова, что он играет решающую роль в современном мире почти так же, как никакое другое устройство, когда-либо изобретенное.
Они встречаются не только в больших приложениях. Дома актуаторы — это важные устройства, которые помогают вам устанавливать консоли или шкафы, в которых можно разместить телевизоры и которые можно открыть одним нажатием кнопки. Их также можно увидеть в телевизорах и настольных подъемниках, которые пользователи могут регулировать с помощью электрических переключателей или кнопок по своему усмотрению.
Дома актуаторы — это важные устройства, которые помогают вам устанавливать консоли или шкафы, в которых можно разместить телевизоры и которые можно открыть одним нажатием кнопки. Их также можно увидеть в телевизорах и настольных подъемниках, которые пользователи могут регулировать с помощью электрических переключателей или кнопок по своему усмотрению.
Хотите посмотреть телевизор в кресле? По всей вероятности, у него есть подвижная подставка для головы или ног, которая также использует привод. Системы домашней автоматизации, которые могут интуитивно закрывать оконные жалюзи в зависимости от количества проникающего света, также зависят от исполнительных механизмов. Короче говоря, их использование бесконечно, потому что они нужны любому механическому движению, а большинству устройств требуется та или иная форма механического движения.
Ниже приведены обычные компоненты, которые являются частью функционирования привода:
- Источник питания: обеспечивает подачу энергии, необходимой для привода привода.
 В промышленных секторах они часто бывают электрическими или жидкостными.
В промышленных секторах они часто бывают электрическими или жидкостными. - Преобразователь мощности: Роль преобразователя мощности заключается в подаче питания от источника к приводу в соответствии с измерениями, установленными контроллером. Гидравлические пропорциональные клапаны и электрические инверторы являются примерами преобразователей энергии в промышленных системах.
- Актуатор: Фактическое устройство, которое преобразует подаваемую энергию в механическую силу.
- Механическая нагрузка: Энергия, преобразованная исполнительным механизмом, обычно используется для функционирования механического устройства. Механическая нагрузка относится к этой механической системе, которая приводится в действие приводом.
- Контроллер: Контроллер обеспечивает бесперебойную работу системы с соответствующими входными величинами и другими заданными значениями, установленными оператором.
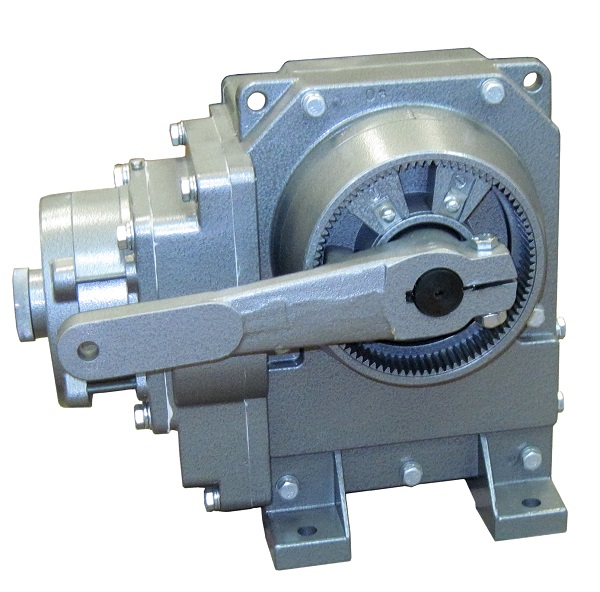 В промышленных секторах они часто бывают электрическими или жидкостными.
В промышленных секторах они часто бывают электрическими или жидкостными.Подробнее
Выбор линейного привода
Как мы уже видели, приводы имеют множество применений в различных областях. Но это не означает, что все актуаторы одинаковы. При покупке привода вы должны знать, какой из них лучше всего соответствует вашим требованиям. Вот подробное руководство о том, как правильно выбрать привод для ваших нужд.
Но это не означает, что все актуаторы одинаковы. При покупке привода вы должны знать, какой из них лучше всего соответствует вашим требованиям. Вот подробное руководство о том, как правильно выбрать привод для ваших нужд.
Шаг 1. Оцените требуемое движение:
Объект, который вам нужно переместить в вашем проекте, требует линейного или вращательного движения? Линейные приводы полезны для приложения механической силы, которая перемещает объект по прямой линии, в то время как поворотные приводы, как следует из названия, создают круговое движение.
Шаг 2: Учитывайте потребляемую энергию:
Электрические приводы становятся все более и более популярными из-за их возрастающей сложности и гибкости при выполнении различных операций. Но это не значит, что он подходит для любой работы. Рассмотрите возможность использования гидравлических или пневматических приводов, если ваша работа не связана с вводом электрического напряжения.
Шаг 3: Оцените требуемый уровень точности:
Некоторые приводы идеально подходят для работы в тяжелых условиях в суровых условиях, но они могут не работать, когда речь идет о выполнении небольших работ, таких как упаковка, требующая точности и возможности повторять одно и то же действие сотни или тысячи раз.
Шаг 4: Узнайте, какое усилие вам нужно:
Назначение привода — перемещать или поднимать объект. Узнайте, в вашем случае, сколько весит этот предмет. Грузоподъемность привода определяет, сколько он может поднять, и хотя многие приводы могут выглядеть одинаково, их грузоподъемность будет различаться. Прежде чем купить привод, убедитесь, что вес вашего объекта соответствует мощности привода.
Шаг 5: Узнайте, как далеко вам нужно переместить объект:
Расстояние, или длина хода, как это технически известно, имеет значение. Длина хода определяет, насколько далеко ваш объект может быть перемещен. Производители часто продают приводы с разной длиной хода.
Шаг 6: Насколько быстрым должно быть движение:
Скорость привода часто является важным фактором для большинства людей, в зависимости от их проекта. Обычно проекты, требующие, чтобы приводы создавали большую силу, будут двигаться медленнее, чем те, которые создают малую силу. Скорость привода измеряется расстоянием в секунду.
Шаг 7: Учитывайте условия эксплуатации:
Должен ли привод работать в неблагоприятных или неблагоприятных условиях, где пыль или влажность вызывают беспокойство? В этом случае вам следует выбрать продукт с более высоким уровнем защиты.
Шаг 8: Определите тип монтажа:
Приводы, представленные на рынке, бывают разных типов монтажа, и перед покупкой привода необходимо понимать их преимущества. Например, метод установки с двумя шарнирами в линейном электрическом приводе позволяет устройству поворачиваться в обе стороны при выдвижении и втягивании. При этом приложение получает две свободные точки поворота при движении по фиксированному пути.
И наоборот, стационарная установка, при которой привод крепится к объекту вдоль вала, удобна для таких действий, как нажатие кнопки. На этом этапе вы должны иметь возможность сузить свои варианты до значительно меньшего пула, с которого вы начали. Отсюда вам нужно будет еще больше сузить круг.
Например, линейные приводы бывают разных стилей для разных функций. Например, стержневой тип является наиболее распространенным и простым среди них, с валом, который расширяется и втягивается. Стиль гусеницы, который не меняет свою общую длину или размер во время операций, больше подходит, когда проблема ограничена пространством. Существуют также колонные подъемники и другие приводы, которые идеально подходят для установки телевизионных и настольных подъемников. Также стоит учитывать такие факторы, как рабочее напряжение и тип двигателя.
Выберите актуатор
Возможности линейного актуатора
Показатели производительности — это количественные выходные данные, которые помогают вам оценить качество конкретного продукта. Приводы можно рассматривать по нескольким показателям производительности. Традиционно наиболее распространенными среди них были крутящий момент, скорость и долговечность. В наши дни энергоэффективность также считается не менее важной. Другие факторы, которые можно учитывать, включают объем, массу, условия эксплуатации и т. д.
д.
Крутящий момент или усилие
Естественно, крутящий момент является одним из наиболее важных аспектов, которые необходимо учитывать при работе привода. Ключевым фактором здесь является то, что необходимо учитывать два типа показателей крутящего момента: статическая и динамическая нагрузка. Момент или сила статической нагрузки относится к мощности привода, когда он находится в состоянии покоя. Динамическая метрика относится к крутящему моменту устройства, когда оно находится в движении.
Скорость
Скорость привода зависит от веса груза, который он должен нести. Обычно чем выше вес, тем ниже скорость. Следовательно, показатель скорости следует в первую очередь рассматривать, когда привод не несет никакой нагрузки.
Долговечность
Тип привода и конструкция производителя определяют долговечность привода. Хотя такие приводы, как гидравлические, считаются более долговечными и прочными по сравнению с электрическими приводами, подробные характеристики качества используемого материала будут зависеть от производителя.
Энергоэффективность
С ростом озабоченности по поводу энергосбережения и его прямого влияния на эксплуатационные расходы энергоэффективность становится все более и более решающим показателем для всех видов машин. Здесь чем меньше энергии требуется актуатору для достижения своей цели, тем лучше.
Как подключить линейные приводы
Учитывая широкий спектр приводов, для их подключения к системе управления используются разные методы. Подключение электрического линейного привода — достаточно простой процесс. Многие электрические линейные приводы в наши дни поставляются с четырьмя контактами, и их подключение так же просто, как их подключение. Однако, если ваш привод не имеет четырех контактов, процесс немного отличается. Вам нужно будет купить дополнительный разъем, который часто имеет длину 6 и 2 фута.
- Подготовьте провода
- Подсоедините провода
- Весь комплект
Ваш привод может поставляться с открытыми концами проводов. При необходимости вы можете немного убрать это перед подключением к 4-контактному разъему. Если провод разъема недостаточно открыт, зачистите и его.
Если провод разъема недостаточно открыт, зачистите и его.
Подсоедините линейный привод к 4-контактному разъему, скрутив правые оголенные провода вместе и заклеив изолентой. Часто провода на актуаторе и разъеме бывают синего и коричневого цветов и их можно подсоединять соответствующим образом.
Иногда цвета на приводе могут отличаться. Например, если привод имеет красный и черный провода, подключите красный к коричневому проводу привода, а черный к синему. Если он поставляется с красным и синим, подключите красный к коричневому, а синий к синему проводу на разъеме. Если провода привода красные и желтые, подключите красный к коричневому проводу, а желтый к синему проводу.
Теперь можно идти. Подключите разъем и подключите блок управления к розетке. Если, несмотря на это, у вас возникнут проблемы, щелкните здесь, чтобы получить более подробное руководство по подключению привода к разъему.
Полное руководство по выбору, тестированию и реализации линейного движения для любого применения. Написано инженерами для инженеров.
Как установить линейный привод
Выбор привода и его правильное подключение — это только половина дела. Не менее важным является монтаж привода способом, подходящим для вашего применения. Ниже приведены два распространенных метода, которые используются для монтажа электрического линейного привода.
Крепление с двумя шарнирами
Этот метод включает в себя фиксацию привода с обеих сторон с помощью точки крепления, которая может свободно поворачиваться и обычно состоит из монтажного штифта или скобы. Крепление с двумя шарнирами позволяет приводу поворачиваться в любую сторону при выдвижении и втягивании, позволяя приложению достичь фиксированного движения траектории с двумя свободными точками поворота.
Одним из наиболее полезных применений этого метода является открытие и закрытие дверей. Когда привод выдвигается, двойные фиксированные точки позволяют двери открываться. Действие закрывания и открывания двери вызывает изменение угла, но шарнир обеспечивает достаточно места для поворота двух точек крепления. При использовании этого метода убедитесь, что имеется достаточно места для выдвижения привода без каких-либо препятствий на его пути.
Стационарный монтаж
В этом методе привод устанавливается в стационарном положении с помощью монтажного кронштейна на валу, фиксирующего его на валу. Обычно такое крепление используется для достижения действия, похожего на толкание чего-либо в лоб. Например, такая форма крепления идеальна для включения или выключения кнопки. При выборе этого метода убедитесь, что монтажное устройство может выдержать нагрузку привода.
Проверка
Применение и возможности линейных приводов
Применение линейных электрических приводов практически безгранично. Заводы-изготовители используют их при обработке материалов. Примерами этого являются режущее оборудование, которое перемещается вверх и вниз, и клапаны, регулирующие поток сырья. Роботы и роботизированные руки в обрабатывающей промышленности и за ее пределами также используют системы линейных приводов для движения по прямой линии.
Примерами этого являются режущее оборудование, которое перемещается вверх и вниз, и клапаны, регулирующие поток сырья. Роботы и роботизированные руки в обрабатывающей промышленности и за ее пределами также используют системы линейных приводов для движения по прямой линии.
Поскольку тенденции автоматизации становятся все более популярными, клиенты всегда ищут способы внедрения линейных приводов в свои приложения.
С ростом популярности систем домашней автоматизации электрические линейные приводы стали использоваться в качестве автоматических оконных штор. Бытовую технику, такую как телевизор, можно без проблем разместить на оптимальной высоте с помощью подъемников для телевизоров, в которых используются линейные электрические приводы. Существуют также настольные подъемники, в которых используются приводы для регулировки высоты в соответствии с потребностями пользователей.
В солнечной энергетике они помогают перемещать панели в направлении солнечного света. Даже в таких отраслях, как сельское хозяйство, где более распространена тяжелая техника с гидравлическими приводами, электрические линейные приводы используются для точных и деликатных движений.
Даже в таких отраслях, как сельское хозяйство, где более распространена тяжелая техника с гидравлическими приводами, электрические линейные приводы используются для точных и деликатных движений.
Тематические исследования
Электрические линейные приводы — Thomson Linear Motion
Thomson в настоящее время имеет две учетные системы: одну для веб-сайта и загрузки моделей САПР, а другую для электронной коммерции. Мы понимаем, что два входа в систему доставляют неудобства, и работаем над тем, чтобы объединить наши системы в один процесс входа. Пока мы не сможем объединить два входа, следуйте этим рекомендациям:
Вход на веб-сайт
- Загрузить модели САПР
- Сохранение и извлечение проектов в инструментах LinearMotioneering® и MicronMotioneering®
- Доступ к экстрасети дистрибьютора и всем связанным ресурсам
Вход в систему электронной коммерции
- Заказ напрямую в Thomson онлайн (только для Северной Америки)
- Авторизованные дистрибьюторы Thomson могут просматривать и заказывать котировки онлайн (по всему миру)
- Просмотр корзины покупок и просмотр предыдущих прямых заказов
- Поиск продукта
- Обзор
- Литература
- Модели САПР
- Расчет вашей системы
Стандартные линейные приводы
Линейные приводы Electrak HD
Линейные приводы Electrak MD
Линейные приводы Electrak LL
Электрогидравлические линейные приводы H-Track
Линейные приводы Electrak 050
Electrak 1 (SP) Линейные приводы
М-трек
Линейные приводы Electrak GX
B-трек
Линейные приводы Electrak LA14
Линейные приводы Electrak PPA-DC
Линейные приводы дроссельной заслонки Electrak
Линейные приводы Electrak 205 AC
Линейные приводы Electrak LA 24 AC
Линейные приводы Electrak PPA-AC
Неприводные линейные приводы Electrak PPA-M
Неприводные линейные приводы Electrak FA14
Линейные приводы Max Jac для тяжелых условий эксплуатации
Электрак неприводной
Бесштоковые линейные приводы LM80
Поворотные приводы
Линейные приводы
Линейные приводы Warner
Устаревшие линейные приводы
Электрические линейные приводы, , которые преобразуют вращательное движение шестерен и шарикового или ходового винта в линейное движение, представляют собой более чистую, безопасную, эффективную и экономичную альтернативу гидравлическим или пневматическим решениям.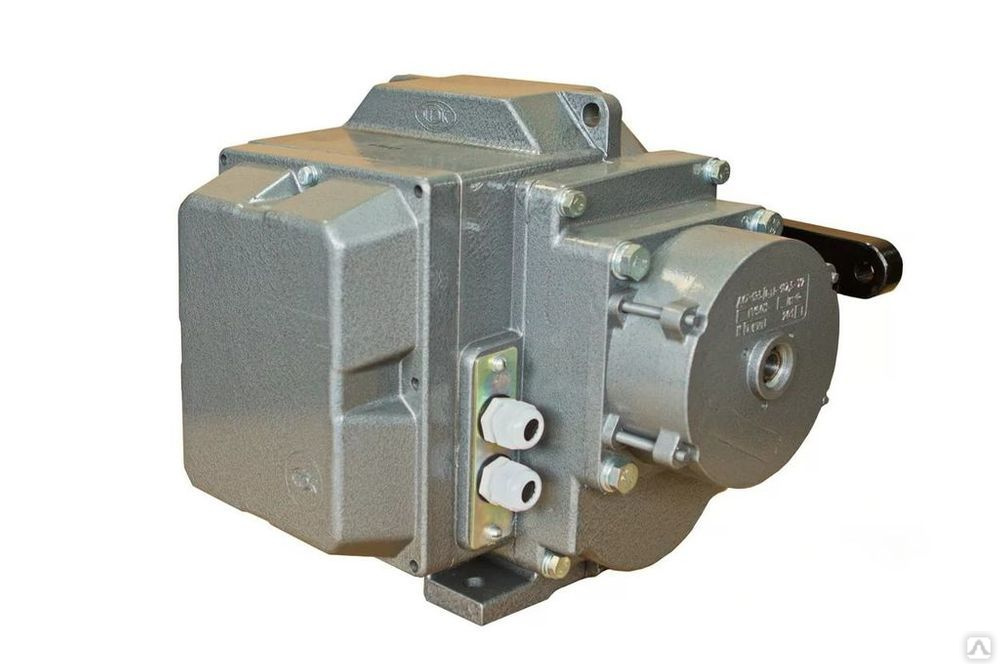 Включение линейных приводов в машины устраняет риски, связанные с попаданием рабочих в опасные ситуации, и превращает утомительные ручные процессы в автоматизированные.
Включение линейных приводов в машины устраняет риски, связанные с попаданием рабочих в опасные ситуации, и превращает утомительные ручные процессы в автоматизированные.
Почему линейные приводы Thomson?
На протяжении более 50 лет в различных областях применения, таких как сельскохозяйственные машины, погрузочно-разгрузочные работы, медицинское оборудование, промышленная автоматизация и т. д., мощные электрические линейные приводы Thomson устанавливают стандарт долговечности и производительности в тяжелых условиях. Эти линейные приводы на 24 В и 12 В, построенные из прочных высококачественных компонентов, не требуют технического обслуживания, не пропускают жидкости и легко интегрируются в существующие процессы автоматизации. Наши «интеллектуальные» сверхмощные линейные приводы были интегрированы с печатной платой, чтобы обеспечить расширенные возможности управления и повышенную производительность.
Оптимизируйте свою конструкцию с помощью индивидуального электрического линейного привода.

Если наш широкий выбор линейных приводов просто не соответствует вашим требованиям, опытные инженеры Thomson могут помочь вам настроить привод в точном соответствии с вашими спецификациями. Опции для вашего индивидуального решения могут включать улучшенную управляемость, возможности синхронизации, длину хода, напряжение, обмен данными по шине и многое другое.
С чего начать?
Thomson предоставляет обширные онлайн-ресурсы, которые помогут вам, где бы вы ни находились в процессе принятия решения о покупке:
Размер и выбор
Записи вебинаров
Часто задаваемые вопросы
Позвольте Thomson помочь вам сделать выбор!
- Линейный привод Electrak HD Микросайт >
- Преимущества электрических приводов >
- Мобильный внедорожный микросайт >
ВИДЕО: Электрогидравлический линейный привод H-Track: работа с тяжелыми грузами в ограниченном пространстве эксплуатация, более компактное расположение штифтов по сравнению с другими приводами с такой же грузоподъемностью, отличная защита от проникновения загрязнений и коррозионная стойкость.
ВИДЕО: Интеллектуальная активация Thomson: проектирование интеллектуальных машин с помощью интеллектуальных инструментов
Что такое интеллектуальная активация и какую пользу она может принести вашим приложениям? Хакан Перссон, директор по глобальной линейке приводов компании Thomson, расскажет вам об устройстве интеллектуального электромеханического привода, его встроенной электронике, где он лучше всего применяется, а также о трех семействах приводов Thomson, предлагающих эти решения.
ВИДЕО: Линейные приводы Electrak® HD повышают IQ конструкции Tribine Harvester
Линейные приводы Thomson Electrak® HD выгодно отличают революционную конструкцию Tribine Harvester. Эти компоненты, реализованные в подбарабаньях вокруг ротора и удлинителях зернового бункера, были выбраны из-за их связи по сети CAN-шины, динамического торможения и многих других интеллектуальных функций.
Линейные приводы Thomson Electrak HD — прочные. Умная.
 Прочный.
Прочный.
Специалист по линейке продуктов Thomson Трэвис Гилмер и инженер-электрик Крис Джонс рассказывают о характеристиках Electrak HD и о том, насколько он прочнее, умнее и надежнее любого линейного привода, разработанного Thomson на сегодняшний день. Бортовая электроника может устранить необходимость в автономных элементах управления, более высокая мощность открывает более широкий спектр гидравлических приложений для преобразования в электрическую, и она выдерживает самые экстремальные экологические испытания
Линейные приводы Electrak HD обеспечивают синхронизацию рабочих платформ Spika
Опция синхронизации, доступная для линейных приводов Thomson Electrak HD, позволяет Spika Design and Manufacturing предлагать своим клиентам рабочие платформы с улучшенными характеристиками, функциональностью и безопасностью.
Добавление еще большего контроля и мощности к интеллектуальным линейным приводам Thomson
Заказ/загрузка литературы
Брошюры
| Линейный привод Electrak HD | 1833 КБ | Электронная почта |
| Линейный привод Electrak HD | 1834 КБ | Электронная почта |
| Линейный привод Electrak HD | 2856 КБ | Электронная почта |
| Линейный привод Electrak HD | 2664 КБ | Электронная почта |
| Линейный привод Electrak HD | 2860 КБ | Электронная почта |
| Линейный привод Electrak HD | 2466 КБ | Электронная почта |
| 带后部安装法兰的Electrak® HD | 1460 КБ | Электронная почта |
| Приводы Electrak HD и MD — Брошюра по испытаниям | 12211 КБ | Электронная почта |
| Приводы Electrak HD и MD — Брошюра по испытаниям | 12511 КБ | Электронная почта |
| Линейные приводы Electrak HD – проверены на прочность! | 1783 КБ | Электронная почта |
| Линейный привод Electrak HD с задним монтажным фланцем | 468 КБ | Электронная почта |
| Линейный привод Electrak HD с задним монтажным фланцем | 468 КБ | Электронная почта |
| Линейный привод Electrak LL | 1260 КБ | Электронная почта |
| Линейный привод Electrak LL | 2008 КБ | Электронная почта |
| Линейный привод Electrak LL | 2011 КБ | Электронная почта |
| Линейный привод Electrak LL | 13658 КБ | Электронная почта |
| Линейные приводы Electrak MD | 2298 КБ | Электронная почта |
| Линейные приводы Electrak MD | 3077 КБ | Электронная почта |
| Линейные приводы Electrak MD | 3085 КБ | Электронная почта |
| Линейные приводы Electrak MD | 2579 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 631 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2016 КБ | Электронная почта |
| Привод дроссельной заслонки Electrak Брошюра | 2018 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2675 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2530 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2493 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2487 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2670 КБ | Электронная почта |
| Брошюра привода дроссельной заслонки Electrak | 2508 КБ | Электронная почта |
| Электрогидравлические приводы H-Track | 2077 КБ | Электронная почта |
| Электрогидравлические приводы H-Track | 2078 КБ | Электронная почта |
| Электрогидравлические приводы H-Track | 2741 КБ | Электронная почта |
| Электрогидравлические приводы H-Track | 1460 КБ | Электронная почта |
| Электрогидравлические приводы H-Track | 1461 КБ | Электронная почта |
| Электрические линейные приводы Max Jac Брошюра | 1800 КБ | Электронная почта |
| Электрические линейные приводы Max Jac Брошюра | 1801 КБ | Электронная почта |
| Электрические линейные приводы Max Jac Брошюра | 811 КБ | Электронная почта |
| Интеллектуальное управление | 1492 КБ | Электронная почта |
| Интеллектуальное управление | 2582 КБ | Электронная почта |
| Интеллектуальное управление | 1491 КБ | Электронная почта |
| Интеллектуальное управление | 2530 КБ | Электронная почта |
| Линейные приводы с шаговым двигателем | 3276 КБ | Электронная почта |
| Линейные приводы с шаговым двигателем | 4041 КБ | Электронная почта |
| Электрические линейные приводы Max Jac Брошюра | 1807 КБ | Электронная почта |
| Морские приводы Thomson Electrak® | 1491 КБ | Электронная почта |
| Линейные приводы Warner B-Track | 2332 КБ | Электронная почта |
| Линейные приводы Warner B-Track | 487 КБ | Электронная почта |
| Линейные приводы Warner B-Track (мини-брошюра) | 218 КБ | Электронная почта |
| Линейные приводы Warner B-Track (мини-брошюра) | 219 КБ | Электронная почта |
| Линейные приводы Warner H-Track | 2351 КБ | Электронная почта |
Каталоги
| Линейные приводы | 7155 КБ | Электронная почта |
| Линейные приводы | 7159 КБ | Электронная почта |
| Линейные приводы | 5661 КБ | Электронная почта |
| Линейные приводы | 7239 КБ | Электронная почта |
| Приводы M-Track | 775 КБ | Электронная почта |
| Линейные электрические приводы и элементы управления Warner | 4971 КБ | Электронная почта |
| Линейные электрические приводы и элементы управления Warner | 4997 КБ | Электронная почта |
| Линейные электрические приводы и элементы управления Warner | 5028 КБ | Электронная почта |
| Линейные электрические приводы и элементы управления Warner | 4992 КБ | Электронная почта |
| Линейные приводы Warner H-Track | 2414 КБ | Электронная почта |
Руководства
| Установка управления приводом AC-063 | 76 КБ | Электронная почта |
| Установка управления приводом AC-247 ELS | 134 КБ | Электронная почта |
| Установка управления приводом DCG | 109 КБ | Электронная почта |
| Установка ручного и моторного управления приводом DCG | 143 КБ | Электронная почта |
| Electrak серии 1 Руководство по установке и эксплуатации | 2222 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak серии 100 | 1668 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak серии E150 | 520 КБ | Электронная почта |
| Electrak серии 205 Руководство по установке и эксплуатации | 1695 КБ | Электронная почта |
| Ремонтный комплект привода Electrak 205 Установка и эксплуатация | 556 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak серии GX | 730 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak серии GX | 730 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak серии GX | 830 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии HD | 1985 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии HD | 1945 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии HD | 2441 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии HD | 2437 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии HD | 2941 КБ | Электронная почта |
| Electrak LL Руководство по установке | 1638 КБ | Электронная почта |
| Руководство по установке Electrak LL | 1657 КБ | Электронная почта |
| Руководство по установке Electrak LL | 2116 КБ | Электронная почта |
| Руководство по установке Electrak LA-FA-IA | 1559 КБ | Электронная почта |
| Руководство по установке Electrak LA-FA-IA | 282 КБ | Электронная почта |
| Руководство по установке и эксплуатации Electrak Marine серии «DM» | 1488 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии MD | 1033 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии MD | 1036 КБ | Электронная почта |
| Руководство по установке и эксплуатации привода Electrak серии MD | 1051 КБ | Электронная почта |
| Установка Electrak PPA-AC/DC | 1450 КБ | Электронная почта |
| Руководство по установке и эксплуатации дроссельной заслонки Electrak | 697 КБ | Электронная почта |
| Руководство по установке и эксплуатации дроссельной заслонки Electrak | 698 КБ | Электронная почта |
| Руководство по установке Electrak E050-Q050 | 81 КБ | Электронная почта |
| Инструкции по установке линейного привода H-Track | 533 КБ | Электронная почта |
| Инструкции по установке линейного привода H-Track | 533 КБ | Электронная почта |
| Установка привода LoadMaster 80 | 304 КБ | Электронная почта |
| Установка магнитного датчика | 457 КБ | Электронная почта |
| Руководство по установке электрического линейного привода Max Jac | 404 КБ | Электронная почта |
| Монтаж двигателя на систему линейного перемещения или прецизионный линейный привод с фланцем RediMount™ | 298 КБ | Электронная почта |
| Монтаж двигателя на систему линейного перемещения или прецизионный линейный привод с фланцем RediMount™ | 299 КБ | Электронная почта |
| Руководство по эксплуатации линейных приводов с шаговым двигателем | 807 КБ | Электронная почта |
| Инструкции по установке линейного привода Warner S-Track и B-Track | 766 КБ | Электронная почта |
Технические статьи
| Электромеханические линейные приводы обеспечивают подъем капотов двигателей тяжелых внедорожников | 2016-08-16 | |
| Приводы Thomson помогают исследовательскому проекту Royal Transportation достичь новых уровней эффективности | 2016-07-19 | |
| Всеобъемлющие испытания на воздействие окружающей среды обеспечивают повышение производительности электромеханических приводов | 2017-02-18 | |
| Самый прочный линейный привод Max Jac для тяжелых условий эксплуатации | 2016-06-17 | |
| Приводы Thomson помогают исследовательскому проекту Royal Transportation достичь новых уровней эффективности | 20. 01.2016 01.2016 | |
| Жесткий привод Идеально подходит для использования в интеллектуальной системе распределения удобрений Amazone | 16.01.2016 | |
| Индивидуальная тележка с регулировкой высоты помогает Videojet повысить производительность при первом проходе | 2016-01-15 | |
| Усовершенствованные технологии и конструкции стимулируют переход к электромеханическому приводу | 08.01.2016 | |
| Бортовая электроника делает линейные приводы более безопасными и умными | 2016-01-07 | |
Электрические приводы дроссельной заслонки: простой способ повысить эффективность и функциональность оборудования с механическими дизельными. .. .. | 14.04.2015 | |
| Тенденции в спецификациях промышленных прямоходных приводов | 08.04.2015 | |
| Тенденции в спецификациях промышленных линейных приводов | 2015-01-26 | |
| Руководство инженера-конструктора. Выбор смазки для шарико-винтовых пар | 04.01.2015 | |
| Электрические приводы дроссельной заслонки: простой способ повысить эффективность и… | 2014-09-19 | |
| Линейные приводы для управления дроссельной заслонкой во внедорожных транспортных средствах | 2013-11-15 | |
| Интеллектуальные приводы приносят большие преимущества коммунальным и другим внедорожным транспортным средствам | 15 мая 2012 г. | |
| Выбор между электромеханическими и гидравлическими прецизионными линейными приводами | 01.05.2012 | |
| Развенчание мифов о преобразовании гидравлических приводов в электрические | 01.09.2007 | |
| Внедорожное землеройное оборудование — движущиеся грузовики стали такими огромными… | 14 сентября 2006 г. | |
| Мобильные приводы достигают высоких целей — производители внедорожников… | 01.05.2005 | |
Сертификаты
| Thomson Neff Industries GmbH EN ISO 9001:2015 и EN ISO 14001:2015 Сертификат | 825 КБ | Электронная почта |
| Thomson Neff Industries GmbH Сертификат EN ISO 9001:2015 и EN ISO 14001:2015 | 830 КБ | Электронная почта |
| Сертификация системы ISO 9001:2015 (Маренго, Иллинойс) | 102 КБ | Электронная почта |
| Сертификация системы ISO 14001:2015 (Маренго, Иллинойс) | 205 КБ | Электронная почта |
| Сертификация системы ISO 14001:2015 (Тихуана, Мексика) | 2692 КБ | Электронная почта |
Файлы конфигурации
| Electrak MD EDS файл для сетей CANopen | 8 КБ | Электронная почта |
| Файл Electrak HD EDS для сетей CANopen | 8 КБ | Электронная почта |
К сожалению, этот инструмент выбора продуктов Thomson не работает должным образом без включенного JavaScript. Пожалуйста, активируйте для продолжения.
Пожалуйста, активируйте для продолжения.
Поговорите со специалистом Thomson о преобразовании ваших моделей механической обработки в электрические
Щелкните здесь
Линейные актуаторы 2D/3D Интерактивные модели
| Warner Linear Actuators | |||
| Electrak HD Linear Actuators | |||
| Electrak MD | |||
| Electrak LL | |||
| Electrak Throttle Линейные приводы | |||
| Линейные приводы Max Jac для тяжелых условий эксплуатации | |||
| Линейные приводы постоянного тока | |||
| AC Linear Actuators | |||
| Non-Driven Linear Actuators | |||
| Rodless Units Linear Actuators (Loadmaster LM80) | |||
| Rotary Actuators | |||
| Legacy Linear Приводы |
Размер вашей системы >
типов приводов | Линейные, электрические, магнитные, пневматические, поворотные, гидравлические
Независимо от того, являетесь ли вы специалистом по машинам или тем, кто все еще изучает детали моторных устройств, вы, скорее всего, знаете об приводе и его значении.
Приводы служат для управления движениями внутри машин. Однако существуют различные типы приводов, которые производят различные движения и используют разные источники энергии. Выявление различий между этими устройствами управления движением поможет вам устранять неполадки в деталях или улучшать процессы внутри вашей машины.
Давайте рассмотрим различные типы приводов и их функции, а также несколько советов по поддержанию их максимальной производительности.
Что такое привод?
Привод — это часть машины, которая инициирует движения, получая обратную связь от управляющего сигнала. Когда на него подается питание, привод создает определенные движения в зависимости от назначения машины.
Какие бывают устройства с исполнительными механизмами?
Машины и системы оснащены приводами с момента их популяризации во время Второй мировой войны. Наиболее известные примеры исполнительных механизмов включают в себя:
- Электродвигатели: Любая часть оборудования или приборов, которые преобразуют электрическую энергию в движение, например вентиляторы, блендеры или холодильники, содержит по крайней мере один исполнительный механизм. Электромобили также используют приводы.
- Шаговые двигатели: Эти приводы наиболее известны тем, что они принимают цифровые импульсы и преобразуют их в механическое движение. Шаговые двигатели часто используются в роботах, интеллектуальных инструментах или автоматизированном режущем оборудовании.
- Гидравлические цилиндры: Это устройства линейного перемещения, которые работают с использованием трубы, поршня и штока. Многие транспортные средства работают с использованием гидравлического движения, например бульдозеры, экскаваторы или экскаваторы.
 Электромобили также используют приводы.
Электромобили также используют приводы.Какие бывают типы приводов?
Приводы можно классифицировать по производимому ими движению и используемому источнику энергии.
Движение
Приводы могут создавать два основных типа движения: линейное и вращательное.
Линейные приводы
Линейные исполнительные механизмы, как следует из их названия, представляют собой устройства, обеспечивающие движение по прямой траектории. Они могут быть механическими или электрическими и в основном встречаются в гидравлических или пневматических устройствах. Любая машина, оборудование или гаджет, требующие прямолинейного движения, обычно имеют линейный привод.
Они могут быть механическими или электрическими и в основном встречаются в гидравлических или пневматических устройствах. Любая машина, оборудование или гаджет, требующие прямолинейного движения, обычно имеют линейный привод.
В простом линейном приводе есть гайка, крышка и скользящая трубка. Скользящая трубка обеспечивает пространство для движения, тогда как гайка и крышка обеспечивают блокирующее движение, которое удерживает привод на прямом пути. Другие сложные линейные приводы будут иметь дополнительные детали, но упомянутая выше система является основой для прямолинейного движения.
Поворотные приводы
В отличие от линейных приводов, поворотные приводы создают круговое движение. Исходя из термина «вращающийся», большинство машин используют эти вращающиеся части для выполнения вращательного движения. Они часто используются в сочетании с линейным приводом, если машине требуется движение вперед, назад, вверх или вниз.
Многие поворотные приводы имеют электрический привод, но некоторые из них приводятся в действие с помощью гидравлической или пневматической системы. Вы можете найти поворотные приводы в стеклоочистителях, электрических вентиляторах или производственных машинах, которые перевозят товары из одной области в другую.
Вы можете найти поворотные приводы в стеклоочистителях, электрических вентиляторах или производственных машинах, которые перевозят товары из одной области в другую.
Источник энергии
Чтобы еще больше различать различные типы приводов, мы также можем сортировать их по источнику энергии или системе, которую они используют для перемещения. Ниже приведены наиболее распространенные приводы в зависимости от источника энергии:
Гидравлические приводы
Гидравлические приводы работают за счет использования заполненного жидкостью цилиндра с поршнем, подвешенным в центре. Обычно гидравлические приводы производят линейные движения, а пружина прикреплена к одному концу как часть возвратного движения. Эти приводы широко используются в тренажерах, таких как степперы или автомобильные тележки.
Пневматические приводы
Пневматические приводы являются одним из самых надежных вариантов управления движением машин. Они используют сжатые газы для создания механического движения. Многие компании предпочитают приводы с пневматическим приводом, потому что они могут выполнять очень точные движения, особенно при запуске и остановке машины.
Многие компании предпочитают приводы с пневматическим приводом, потому что они могут выполнять очень точные движения, особенно при запуске и остановке машины.
Примеры оборудования, в котором используются пневматические приводы, включают:
- Автобусные тормоза
- Тренажеры
- Лопастные двигатели
- Датчики давления
- Пневматические почтовые системы
Электрические приводы
Электрические приводы, как вы уже догадались, требуют для работы электричества. Хорошо известные примеры включают электромобили, производственное оборудование и робототехнику. Подобно пневматическим приводам, они также создают точное движение, поскольку поток электроэнергии является постоянным.
Различные типы электрических приводов включают:
- Электромеханические приводы: Эти приводы преобразуют электрические сигналы во вращательные или линейные движения и могут даже сочетать оба действия.
- Электрогидравлические приводы: Приводы этого типа также питаются от электричества, но приводят в движение гидроаккумулятор. Аккумулятор затем обеспечивает силу для движения, обычно наблюдаемую в тяжелом промышленном оборудовании.
 Аккумулятор затем обеспечивает силу для движения, обычно наблюдаемую в тяжелом промышленном оборудовании.
Аккумулятор затем обеспечивает силу для движения, обычно наблюдаемую в тяжелом промышленном оборудовании.Тепловые и магнитные приводы
Тепловые и магнитные приводы обычно состоят из сплавов с памятью формы, которые можно нагревать для получения движения. Движение тепловых или магнитных приводов часто возникает из-за эффекта Джоуля, но это также может происходить, когда катушка помещается в статическое магнитное поле. Магнитное поле вызывает постоянное движение, называемое силой Лапласа-Лоренца. Большинство тепловых и магнитных приводов могут производить широкий и мощный диапазон движений, оставаясь при этом легкими.
Механические приводы
Некоторые приводы в основном механические, например, шкивы или системы реечной передачи. Прикладывается другое механическое усилие, такое как вытягивание или толкание, и привод будет использовать это единственное движение для получения желаемых результатов. Например, вращение одной шестерни на наборе реечных шестерен может переместить объект из точки А в точку Б. Тяговое движение, приложенное к шкиву, может поднять другую сторону вверх или в нужное место.
Тяговое движение, приложенное к шкиву, может поднять другую сторону вверх или в нужное место.
Приводы из суперскрученного полимера
Приводы из суперскрученного полимера являются относительно новым дополнением к различным типам приводов. Они используются в робототехнике и протезах конечностей, поскольку они могут воспроизводить движение человеческих мышц с помощью катушки, которая сжимается и расширяется при нагревании или охлаждении.
Как правильно выбрать привод
Понимание различных типов приводов является важным шагом при выборе наилучшего варианта для вашего оборудования. Поскольку каждый вид имеет свое уникальное предназначение и потребности в энергии, мы рассмотрим факторы, которые помогут вам принять наилучшее решение.
Доступность источника питания
Первое, что вы должны учитывать, это совместимость вашего источника питания. Если у вас есть промышленная площадка с источником электроэнергии, возможно, лучшим выбором — и вариантом с наибольшим количеством вариантов — будут электрические приводы. Если поблизости нет источников электричества или вы хотите полностью функциональное оборудование без электричества, вы можете выбрать пневматический или гидравлический тип.
Если поблизости нет источников электричества или вы хотите полностью функциональное оборудование без электричества, вы можете выбрать пневматический или гидравлический тип.
Требуемое перемещение
Другим важным фактором при выборе привода является диапазон перемещения, необходимый для вашего оборудования. Является ли он линейным, вращающимся или интеграцией того и другого? Заказные приводы могут комбинировать или создавать эти движения в хронологическом порядке, чтобы помочь вам конкретизировать конечное оборудование.
Точность
Некоторые приводы более точны, чем другие. Например, пневматические тормоза создаются с помощью пневматических приводов, поскольку известно, что давление воздуха эффективно при пуске и остановке. Другие приводы имеют больший диапазон вариаций движения, например приводы с гидравлическим приводом.
Любая отрасль, требующая высокого уровня точности для безопасности и успешной работы, должна рассмотреть типы приводов, которые имеют определенные движения.
Вопросы безопасности и охраны окружающей среды
Безопасность — еще один фактор, который необходимо учитывать при выборе привода для вашего оборудования. Электрические или термические приводы следует использовать с осторожностью в местах с экстремальными температурами или опасными проводниками. Например, эксплуатация электроприводов вблизи водоема без герметизации или других мер безопасности может создать профессиональную опасность.
Если ваша компания также стремится сократить выбросы углекислого газа, вам необходимо отметить воздействие каждого привода на окружающую среду. Как правило, электрические приводы практически не имеют углеродного следа.
Официальные инструкции
Существуют также специальные инструкции, которым необходимо следовать для промышленных приводов в определенных областях. Например, места с высоким содержанием горючих газов должны соответствовать требованиям, установленным Национальной ассоциацией производителей электрооборудования (NEMA).
Обслуживание привода
Все оборудование требует обслуживания. Техническое обслуживание ваших приводов поможет предотвратить серьезные остановки, опасности или потерю производительности. Вот несколько общих советов по поддержанию приводов в отличной форме.
- Регулярный осмотр : Выполнение обычных визуальных проверок оборудования позволяет выявить ранние признаки проблем с приводом. Механик с острым глазом необходим для осмотра на предмет износа.
- Пополнение и замена: Гидравлические приводы иногда требуют пополнения цилиндровой жидкости. Всегда дважды проверяйте наличие утечек и признаков низкого уровня гидравлической жидкости. Замените ослабленные или поврежденные гайки, болты, катушки или винты в деталях привода.
- Измерение данных о производительности : в некоторых случаях исполнительные механизмы не проявляют внешних признаков проблемы, но вы можете отследить проблемы по производительности. Автоматические графики и выходные вычисления могут понадобиться, если вы хотите обнаружить более глубокие проблемы.
Нужен привод? Мы можем помочь
Независимо от того, приняли ли вы решение и вам нужен привод или вы еще не определились и вам нужна дополнительная информация о различных типах приводов, наша команда всегда готова помочь. В компании Creative Motion Control работает группа квалифицированных инженеров, исследователей и техников, стремящихся создать лучшие приводы на рынке. Свяжитесь с нами сегодня по телефону (425) 800-8045, чтобы обсудить ваши потребности или запросить расценки.
Краткое руководство по электрическим приводам
Главная » Блог » Краткое руководство по электрическим…
Одним из основных компонентов, который делает возможной автоматизацию, являются электрические приводы. Эти механические устройства преобразуют электричество в кинетическую энергию с помощью вращательного или линейного движения.
Электрические приводы работают так же, как и другие типы приводов. Единственная разница в том, что он использует электричество в качестве входа. Электричество питает двигатель, приводя в движение определенные компоненты. Конечным выходом является механическая энергия.
Эти компоненты приводят в действие работающий электрический линейный привод:
- Источник питания — может быть переменного или постоянного напряжения
- Контроллер — обеспечивает выполнение системой необходимых функций, отправляя сигналы на привод
- Привод — принимает сигналы от
- Двигатель – получает электроэнергию от привода и производит механическую энергию, часто за счет вращения вала
- Привод – компонент, который физически перемещается (см. типы ниже)
Типы электрических приводов
Привод стержневого типа
Приводы стержневого типа производят движение путем втягивания и выдвижения штока из корпуса. Со стержневым приводом груз перемещается двумя способами:
- Груз перемещается, будучи прикрепленным к стержню
- Груз толкается или тянется стержнем
Этот тип электрического привода идеально подходит для вставки и нажатия . Они также являются оптимальным выбором для перемещения грузов, требующих сквозного позиционирования, высоких скоростей и больших усилий.
Одним из основных преимуществ стержневых приводов является их закрытый корпус. Он предотвращает попадание жидкостей и других загрязнений в отверстие штока. Вот почему большинство стержневых приводов обычно имеют высокие классы защиты от воды и других жидкостей.
Приводы стержневого типа используются в различных областях, таких как автоматизированные столы и кровати в современных центрах ухода. Они также используются в автомобильной промышленности для открывания автомобильных дверей, ограждений и капотов.
Рекомендуемый продукт: Стержневые электрические актуаторы Norgren ELION
Бесштоковый привод
Основное различие между бесштоковыми и штоковыми приводами заключается в том, как они воспринимают нагрузку. В то время как стержневые приводы толкают или тянут груз с помощью стержня, бесштоковые приводы перемещают его с помощью ремня или винта. Этот метод дает бесштоковому приводу следующие преимущества:
- Поддержка высоких нагрузок и крутящих моментов
- Меньшая занимаемая площадь при одинаковой длине хода
- Устраняет риск изгиба и коробления штока
Его общая конструкция со стандартным поршнем, выходящим полностью за пределы его длины во втянутом состоянии, позволяет ему обеспечивать исключительные результаты, недостижимые для штокового привода. Такая конструкция делает бесштоковые приводы идеальными для упаковки, резки, сборки и производства электроники.
Рекомендуемый продукт: Бесштоковый электрический привод Norgren ELION
Пневматические и электрические линейные приводы
Пневматические линейные приводы
Основное различие между пневматическими и электрическими приводами заключается в типе источника. Пневматические линейные приводы используют сжатый газ. Газ закачивается в один конец цилиндра, а затем выталкивается на противоположном конце. Это действие толкает поршень вперед, который затем приводит в движение груз.
Пневматические линейные приводы представляют собой стержневые приводы с внутренним стержнем, который выходит за пределы корпуса (цилиндра) для перемещения груза вперед. Для этого типа привода отверстие и шток круглые.
Этот линейный привод в основном используется в промышленных условиях, часто в автоматизированных системах и машинах. Обычно это часть производства, паллетирования, обработки материалов, продуктов питания и напитков, а также упаковки.
Электрические линейные приводы
Электрические линейные приводы работают на электричестве, а двигатели служат их источником. В отличие от пневматических линейных приводов, в них нет поршня, вместо него используется винт или ремень. Электрические приводы, как правило, дороже, чем большинство других типов, но они спроектированы так, чтобы их эксплуатация была намного дешевле.
Электрические приводы используются либо по отдельности, либо в комбинации для последовательного выполнения нескольких задач, таких как дотягивание, подъем, вращение и наклон. Они также обеспечивают высокоскоростное, точное и воспроизводимое управление положением, создавая усилие от 2000 до 4000.
Электрические линейные приводы — хороший выбор для автоматизированных систем, производства полупроводников, медицинских устройств и производства продуктов питания и напитков.
Общие крепления привода
Выбор правильного типа крепления может повлиять на работу линейного привода. Ниже приведены наиболее распространенные типы монтажа, используемые линейными приводами.
Крепление вилки
В одном популярном креплении для электрических линейных приводов используется вилка и монтажный штифт. Нет скобок или какой-либо другой поддержки, чтобы остановить движение. Это позволяет приводу поворачиваться с обеих сторон.
Крепление на цапфе
В этом типе крепления используется специальный монтажный блок, размещаемый спереди или сзади привода. Этот метод монтажа позволяет корпусу и цилиндру двигаться. Цапфовые крепления часто используются в навесном оборудовании для квадроциклов или UTV.
Крепление подшипника на конце тяги
Подшипники на конце шатуна называются универсальными шарнирами. Вкладыш шарикоподшипника позволяет стержню или болту проходить через него, что приводит к ограниченному смещению. Обычно это угол, отличный от 90 градусов. Этот тип крепления используется в открывателях окон и рулевых колонках автомобилей.
Крепление каретки
Крепления каретки для бесштоковых приводов имеют неподвижный корпус и скользящую каретку. Они наиболее полезны для приложений, требующих большой силы, направления груза и скорости от низкой до умеренной. Они также поставляются с ручным управлением и блоком питания.
Реальные приложения для электрических приводов
Вот несколько примеров реального использования электрических приводов.
- Производство продуктов питания и напитков: Электроприводы тихие и чистые. Некоторые из них устойчивы к коррозии и имеют гладкую конструкцию с небольшими щелями или без них, где могут скапливаться грязь или бактерии. Это делает электрические актуаторы идеальными для чувствительных отраслей промышленности, таких как производство продуктов питания, напитков и медицинских изделий.
- Робототехника: Индустрия автоматизации опирается на электрические приводы. Приводы позволяют автоматизированным системам поддерживать качество и точность производства. Это связано с тем, что электрические приводы могут контролировать и повторять точные движения.
- Управление клапаном: Перерабатывающие предприятия, оснащенные клапанами для управления потоком сырья, полагаются на электрические приводы из-за их способности обеспечивать точные действия и управление.
- Тяжелое оборудование: В то время как в тяжелом оборудовании часто используется гидравлика, в машинах, непосредственно контактирующих с пищевыми продуктами, напитками, медицинскими приборами и полупроводниками, используются электрические приводы. Они не полагаются на жидкости, чтобы инициировать движение, а вместо этого используют электрическую энергию в качестве источника.
Электрические приводы: важнейшая технология
Электрические приводы — это удивительные технологические решения, которые обеспечивают работу многих отраслей, делающих нашу повседневную жизнь возможной. Его простая способность преобразовывать электрическую энергию в кинетическую позволила ему сыграть решающую роль в современном мире.
Например, электрические приводы обеспечивают быстрое и точное перемещение таких устройств, как производственный робот-манипулятор. Эти актуаторы помогают системам управления двигателем вашего автомобиля, регулируя воздушные заслонки, которые управляют сгоранием топлива.
Независимо от того, являются ли они бесштоковыми или стержневыми по конструкции, применение электрических приводов практически безгранично. Также стоит отметить, что его качество, рабочая среда и тип используемого крепления могут влиять на работу электроприводов.
