

Содержание
Тяговые двигатели пульсирующего тока | Машины постоянного тока
- Подробности
- Категория: Электрические машины
- энергоблок
- электродвигатель
- постоянный ток
Содержание материала
- Машины постоянного тока
- Основной тип машины
- Обмотки барабанные
- Обмотки барабанн. якоря
- Улучшение коммутации
- Круговой огонь
- Щетки их характеристики
- Анализ коммутации
- Основные машины
- Прокатные двигатели
- Машины с гладким якорем
- Тяговые пульсирующего
- Специальные машины
Страница 12 из 13
Особенностью этого типа двигателей является то, что они питаются от сети переменного тока через выпрямительный блок. В связи с этим пульсации напряжения и тока получаются значительно большими, чем в двигателях постоянного тока нормальной конструкции.
Выпрямленное напряжение, кроме постоянной составляющей, содержит высшие гармонические, среди которых особое значение приобретает вторая гармоническая. В основном ею и определяется пульсирующий характер тока двигателя.
Величина пульсаций оценивается коэффициентом пульсаций (рис. 11-4)
где Iмакс — максимальное значение тока; Iмин — минимальное значение тока.
При условии выполнения двигателей пульсирующего тока специальной конструкции и включения в сеть через дополнительную аппаратуру — сглаживающий реактор (рис. 11-5) — можно допустить величину коэффициента пульсаций до 30%.
Двигатели пульсирующего тока должны выполняться с шихтованными добавочными полюсами и ярмом, между добавочными полюсами и ярмом предусматривается дополнительный зазор. Назначение дополнительного зазора заключается в том, чтобы поток добавочных полюсов совпадал по фазе с током якоря и соответствовал ему. При этом улучшаются условия протекания процесса коммутации в секциях якоря;
Для снижения пульсаций напряжения последовательно с двигателем пульсирующего тока в сеть включается сглаживающий реактор с высоким значением индуктивности. Благодаря этому ограничивается пульсация главного потока; величина трансформаторной э.д.с. Етр=4,44 fФw, индуктируемой этим потоком в коммутируемой секции, становится ничтожно малой. Уменьшение э.д.с. Tтр благоприятно влияет на протекание процесса коммутации.
Благодаря этому ограничивается пульсация главного потока; величина трансформаторной э.д.с. Етр=4,44 fФw, индуктируемой этим потоком в коммутируемой секции, становится ничтожно малой. Уменьшение э.д.с. Tтр благоприятно влияет на протекание процесса коммутации.
Рис. 11-4. Определение коэффициента пульсаций напряжения и тока
Рис. 11-5. Схема включения тягового двигателя пульсирующего тока в сеть 1 — выпрямительный блок; 2 — сглаживающий реактор; 3 — активное сопротивление, шунтирующее обмотку главных полюсов; 4 — обмотка главных полюсов ГП, 5 — обмотка добавочных полюсов ДП; 6 — якорь тягового двигателя
При высоком значении индуктивности сглаживающего реактора можно упростить конструкцию двигателя пульсирующего тока и выполнять его ярмо из массивной стали, т. е. как для машин постоянного тока.
Однако несмотря на указанные выше меры, улучшающие условия работы двигателей пульсирующего тока, последние вследствие наличия высших гармонических имеют ухудшенную коммутацию и повышенный нагрев по сравнению с двигателями постоянного тока.
Ухудшение коммутации может быть на 1—1,5 класса шкалы ГОСТ 183—66. Увеличенный нагрев возникает не только в активных, но и в конструктивных частях двигателя.
Еще одним существенным недостатком двигателя пульсирующего тока являются более напряженные потенциальные условия на коллекторе, которые способствуют возникновению перебросов искр с одной пластины на другую и кругового огня на коллекторе.
Уменьшение недостатков двигателей пульсирующего тока возможно лишь за счет увеличения габаритов сглаживающего реактора, усложнения конструкции
и утяжеления самого двигателя. Однако для большинства установок увеличение массы и габаритов оказывается недопустимым, а потому приходится искать оптимальный вариант, т. е. при максимально допустимом kпул с технико-экономической точки зрения.
В настоящее время наибольшее применение двигатели пульсирующего тока находят при электрификации железных дорог на наиболее прогрессивной системе электрической тяги — на однофазном токе повышенного напряжения промышленной частоты. Эта система тяги принята в качестве основной для СССР, Франции, Великобритании, Японии, Индии и ряда других стран.
Эта система тяги принята в качестве основной для СССР, Франции, Великобритании, Японии, Индии и ряда других стран.
В СССР при электрификации железных дорог на переменном токе напряжение в контактном проводе равно 25 кВ при частоте 50 Гц.
На электроподвижном составе железных дорог, т. е. на электровозах и моторвагонных секциях, устанавливается понижающий трансформатор с регулированием напряжения и выпрямительный блок, состоящий из кремниевых диодов. Тяговые двигатели получают питание из контактной сети через выпрямительный блок.
Как правило, тяговые двигатели пульсирующего тока выполняются с последовательным возбуждением (рис. 11-5). Обмотка главных полюсов шунтируется постоянно включенным активным сопротивлением, через которое проходит переменная составляющая тока; благодаря этому резко снижаются пульсации тока возбуждения и потока главных полюсов. Значение коэффициента шунтирования по постоянному току обычно лежит в пределах 0,85—0,95.
Пуск тяговых двигателей осуществляется за счет постепенного увеличения напряжения на трансформаторе.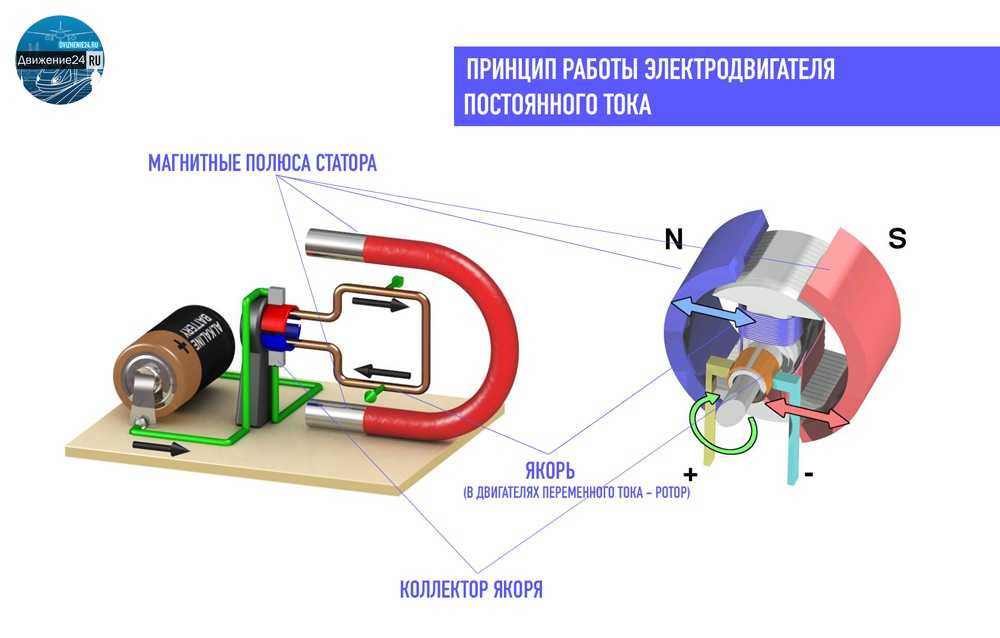
Тяговые двигатели должны удовлетворять следующим основным требованиям: а) соответствовать заданным характеристикам электроподвижного состава железных дорог; б) иметь высокое использование, т. е. малые габариты и массу, при высокой надежности работы во всех режимах.
Основные данные тяговых двигателей задаются для часового и длительного режимов, В современных тяговых двигателях ток в часовом режиме всего на 4—5% больше, чем в длительном режиме. Большое значение имеют режим пуска и, особенно, режим работы при максимальной скорости, поскольку увеличение скоростей движения является первоочередной задачей для железных дорог во всем мире.
Для тяговых двигателей пульсирующего тока, имеющих высокую коммутационную напряженность, предельное среднее значение реактивной э.д.с. е, в самом тяжелом режиме не должно превышать 9—10 в. Этот режим соответствует выходу двигателя на тяговую характеристику при максимальном ослаблении поля полюсов, номинальном напряжении и токе якоря, отвечающих длительному режиму (рис. 11-6). Регулирование скорости тягового двигателя пульсирующего тока (также и постоянного тока) осуществляется за счет шунтирования обмотки возбуждения. У двигателей пульсирующего тока ослабление поля доходит до 50%. Регулирование скорости за счет ослабления поля позволяет облегчить условия работы трансформатора и уменьшить его размеры.
11-6). Регулирование скорости тягового двигателя пульсирующего тока (также и постоянного тока) осуществляется за счет шунтирования обмотки возбуждения. У двигателей пульсирующего тока ослабление поля доходит до 50%. Регулирование скорости за счет ослабления поля позволяет облегчить условия работы трансформатора и уменьшить его размеры.
О потенциальных условиях на коллекторе тягового двигателя лучше всего можно судить по величине среднего градиента потенциала
Рис. 11-6. Тяговые характеристики двигателя пульсирующего тока
При отсутствии компенсационной обмотки средний градиент потенциала не должен превышать 30 в/см.
Существенно улучшаются потенциальные условия при применении компенсационной обмотки, шихтованной станины и расслоенных щеток. В двигателе пульсирующего тока с компенсационной обмоткой допустима величина εк.ср<45 в/см, поэтому высокоиспользованные тяговые двигатели выполняются в. настоящее время всеми фирмами в основном с компенсационной обмоткой.
Весьма ценным свойством тяговых двигателей пульсирующего тока является свободный выбор номинального напряжения — это благоприятно сказывается на улучшении использования двигателя.
Оптимальное значение напряжения для электровозных двигателей зависит от мощности двигателя, весьма распространенным значениям мощности 850—900 кВт соответствует напряжение 900—950 в. Важен также правильный выбор числа полюсов двигателя; так, при числе полюсов 2р=6 из-за меньшего сечения станины масса двигателя снижается.
Шестиполюсное исполнение тяговых двигателей возможно при номинальном напряжении не менее 900—1000 в. Поскольку тяговые двигатели должны иметь высокое использование и малые габариты, электромагнитные и механические нагрузки выбираются предельными для этого класса машин.
Ниже приводятся соответствующие значения основных параметров:
Линейная нагрузка А 550—650 а/см
Индукция в зазоре В6 0,9—1,0 тл
Фактор нагрева AJa . . 2500—4000
. 2500—4000
Максимальная скорость на окружности якоря Vо. макс 60—70 м/сек
Максимальная скорость на коллекторе vк. макс 4—56 м/сек
При этом технико-экономические показатели и машинная постоянная для длительного режима работы равны: gp=3,5-3,6; gм=2,7; ε=17,5-18; ξ=0,51-0,53; СА=(14-15)-10.
Для повышения надежности работы тяговых двигателей существенное значение имеет то, что двигатель включается в сеть через трансформатор, т. е. лучше защищен от перенапряжений в сети.
За последние годы во Франции широкое распространение получила конструкция локомотивов с передачей от одного тягового двигателя на две или три оси; таким образом выполняются электровозы и тепловозы с электропередачей. Мощность тягового двигателя при этом увеличивается до 1500—2000 кВт.
Другим направлением в развитии современного тягового электромашиностроения является выполнение так называемых многосистемных локомотивов, т. е. предназначенных для работы при различных системах тяги. Такие электровозы способствуют увеличению скорости движения, поскольку сокращается время остановок поезда.
Такие электровозы способствуют увеличению скорости движения, поскольку сокращается время остановок поезда.
В ряде стран имеется по две системы тяги, более всего распространены четыре системы электрической тяги:
- Однофазный ток повышенного напряжения (20—25 кВ), промышленной частоты (50 или 60 Гц).
- Однофазный ток повышенного напряжения (11—15 кВ), пониженной частоты (162/3 или 25 Гц).
- Постоянный ток с напряжением 3 кВ в контактной сети.
- Постоянный ток с напряжением 1,5 кВ в контактной сети.
В СССР железные дороги электрифицированы на системах тяги по пп. 1 и 3. В связи с этим на Новочеркасском электровозостроительном заводе, кроме электровозов переменного и постоянного тока, строятся электровозы двойного тока. Французскими и швейцарскими фирмами выполняются трех- и даже четырехсистемные электровозы, которые могут вести составы через ряд стран европейского континента, имеющих различные системы тяги. Отличительной особенностью таких электровозов является то, что тяговые двигатели обязательно выполняются на напряжение 1,5 кВ (чтобы удовлетворить требованиям систем тяги на постоянном токе). Почти всегда от одного тягового двигателя большой мощности осуществляется передача на две или три оси тележки локомотива.
Почти всегда от одного тягового двигателя большой мощности осуществляется передача на две или три оси тележки локомотива.
В табл. 11-6 и 11-7 приведены данные современных тяговых двигателей, изготовляемых зарубежными передовыми фирмами для одно- и многосистемных электровозов.
- Назад
- Вперёд
- Назад
- Вперёд
- Вы здесь:
- Главная
- Оборудование
- Эл. машины
- Определение тока и потерь холостого хода асинхронных двигателей
Еще по теме:
- Дефекты обмоток якоря электрических машин постоянного тока
- Обозначения вывода обмоток электрических машин постоянного тока
- Эксплуатационные режимы электроэнергетических систем
- Бесконтактные электродвигатели постоянного тока
- Монтаж и испытания эл.
 машин
машин
 машин
машинКоллекторный тяговый электродвигатель — О поездах и железной дороге
Коллекторный тяговый электродвигатель
— коллекторная электрическое машина тягового исполнения, используемая для привода колёсных пар подвижного состава. Различают коллекторные тяговые электродвигатели постоянного тока, пульсирующего тока и однофазного переменного тока.
Впервые коллекторные тяговые электродвигатели постоянного тока, работавший от гальванической батареи, применил в 1838 Б. С. Якоби для движения судна по р. Неве. Коллекторные тяговые электродвигатели для тяги на железных дорогах демонстрировался в кон. 70-х гг. 19 в. (опыты Ф. А. Пироцкого для привода колёсной пары вагона в 1876 в Сестрорецке; макет электровоза Э. В. Сименса в 1879 на берлинской промышленной выставке). В 80-х гг. коллекторные тяговые электродвигатели начали использовать на гор. трамвае, а затем и на железнодорожном подвижном составе.
Коллекторный тяговый электродвигатель для трамваев строились на Рижском («РЭЗ»), Петроградском («Электросила») и Московском («Динамо») заводах. В 1929 заводом «Динамо» построены тяговые двигатели мощностью 340 кВт на напряжение 1500 В для магистральные электровозов ВЛ19. С кон. 40-х гг. производство коллекторных тяговых электродвигателей для электровозов в основные осуществляется в Новочеркасске и Тбилиси, для тепловозов — в Харькове, для моторных вагонов ж. д. и метрополитена— в Риге и Москве.
В 1929 заводом «Динамо» построены тяговые двигатели мощностью 340 кВт на напряжение 1500 В для магистральные электровозов ВЛ19. С кон. 40-х гг. производство коллекторных тяговых электродвигателей для электровозов в основные осуществляется в Новочеркасске и Тбилиси, для тепловозов — в Харькове, для моторных вагонов ж. д. и метрополитена— в Риге и Москве.
Основные части коллекторных тяговых электродвигателей — неподвижный индуктор и вращающийся якорь. Индуктор, создающий магнитный поток,— стальной (литой или сварной) массивный остов с гл. и дополнительными полюсами. Якорь, вращаясь в индукторе, преобразует электрическое энергию в механическую (режим двигателя), либо механическую в электрическую (режим генератора). Якорь имеет стальной сердечник с обмоткой, подсоединённой к коллектору. Коллектор, набранный из отд. пластин, необходим для изменения направления тока (коммутации) в проводнике якорной обмотки, чтобы не менялось направление вращающего момента при перемещении этого проводника под полюс др. полярности. Процесс коммутации может сопровождаться искрением под щётками; расстройство коммутации при определенные условиях приводит к возникновению электрическое дуги на коллекторе (круговому огню), повреждающей коллектор и щётки. Мощность коллекторных тяговых электродвигателей ограничена условиями коммутации.
полярности. Процесс коммутации может сопровождаться искрением под щётками; расстройство коммутации при определенные условиях приводит к возникновению электрическое дуги на коллекторе (круговому огню), повреждающей коллектор и щётки. Мощность коллекторных тяговых электродвигателей ограничена условиями коммутации.
Коллекторные тяговые электродвигатели постоянного тока питаются непосредственно от контактной сети напряжение 3000—4000 В (за рубежом есть линии на 1500 В). Двигатели соединяют по два и более последовательно для понижения номинального напряжения на коллекторе до 1500 В, реже — 750 В. Изоляцию обмоток от корпуса рассчитывают на макс, напряжение в контактной сети. У тепловозов коллекторные тяговые электродвигатели постоянного тока получают питание от тягового генератора, макс, напряжение которого 750—1050 В.
Коллекторные тяговые электродвигатели пульсирующего тока питается от однофазного выпрямителя ЭПС, выдерживает непостоянную пульсацию тока до 30% частотой 100 Гц. Номинальное напряжение на коллекторе 750—1000 В, сила тока — до 1200 А, макс, напряжение до 1200 В. Напряжение коллекторных тяговых электродвигателей регулируется переключением обмоток тягового трансформатора или изменением угла открытия тиристоров (при питании от управляемого выпрямителя).
Напряжение коллекторных тяговых электродвигателей регулируется переключением обмоток тягового трансформатора или изменением угла открытия тиристоров (при питании от управляемого выпрямителя).
Коллекторные тяговые электродвигатели однофазного переменного тока включают непосредственно на вторичную обмотку трансформатора. В ряде стран Зап. Европы тяговые двигатели питают переменным током пониженной частоты 163/3 Гц.
В 50-е гг. на электровозах (Франция) коллекторные тяговые электродвигатели эксплуатировались при промышленной частоте 50 Гц; однако распространение эти двигатели не получили из-за сложности конструкции многощёточного токосъёмного узла и малого вращающего момента. Особенно неперспективными однофазные коллекторные тяговые электродвигатели стали после появления ЭПС с полупроводниковыми выпрямителями. В СССР такие коллекторные тяговые электродвигатели для тяги не применяли.
Коэффициент полезного действия коллекторных тяговых электродвигателей постоянного тока достигает 95%. Недостатком коллекторных тяговых электродвигателей является ненадёжный в работе коллекторно-щёточный узел, ограничивающий мощность и требующий регулярного обслуживания при эксплуатации.
Недостатком коллекторных тяговых электродвигателей является ненадёжный в работе коллекторно-щёточный узел, ограничивающий мощность и требующий регулярного обслуживания при эксплуатации.
Ранняя история тягового двигателя постоянного тока | Железнодорожный технический веб-сайт
Источники
Трамваи и электрические железные дороги в 19 веке, Электрическая железная дорога Кассиера, номер 1899.
Sprague, F.j. (1931), Электрическая тяга в пространстве трех измерений , Журнал Мэрилендской академии наук.
Sprague, FJ (1888), The Solution of Rapid Transit , Американский институт инженеров-электриков.
Берч, Э.П. (1911), Электрическая тяга для железнодорожных поездов , МакГроу Хилл, Нью-Йорк.
Миддлтон, У. Д. и Миддлтон, У. Д. III, (2009), Фрэнк Джулиан Спраг Изобретатель и инженер-электрик , издательство Университета Индианы.
Далзелл, Ф. (2010 г.), Инженерное изобретение, Массачусетский технологический институт (ISBN: 9780262042567).
Введение
Сегодня электродвигатель является неотъемлемой частью железнодорожной техники как для дизельных, так и для электрических поездов. Еще в 1870-х годах паровозы были единственной формой тяги на железных дорогах, а электричество было новой наукой, но в конечном итоге оно стало основным, постепенно разрабатываясь для освещения и мощности двигателя. В течение 20 лет трамваи и локомотивы с электрическим приводом были введены для городских железных дорог и проходили испытания на магистральных железных дорогах.
Во-первых, стоит помнить, что электродвигатели для использования в трамваях разрабатывались разными инженерами, каждый из которых вносил идеи и тестировал их, в основном независимо друг от друга. В раннем бизнесе по производству электродвигателей было большое соперничество, потому что люди осознали огромный потенциал технологии и огромные прибыли, которые она могла принести.
Первый электродвигатель, который сегодня мы признали бы работающей машиной, был разработан бельгийским инженером Зенобом Граммом. В 1873 году он случайно обнаружил, что изобретенная им динамо-машина производит электрический ток, который другая машина такой же конструкции может преобразовать обратно во вращение. Когда якорь динамо-машины вращался в магнитном поле для производства электрического тока и был соединен парой проводов с другим динамо-машиной, он обнаружил, что якорь другого динамо-машины вращается. Таким образом, он обнаружил, что механическая конструкция динамо-машины (или генератора, как мы назвали бы его сегодня) такая же, как у электродвигателя. Другие инженеры вскоре подхватили эту концепцию и улучшили ее. Хотя машины были грубыми, они были первыми коммерчески успешными электрическими машинами постоянного тока (DC), которые постепенно улучшались по мере накопления опыта работы с ними.
В 1873 году он случайно обнаружил, что изобретенная им динамо-машина производит электрический ток, который другая машина такой же конструкции может преобразовать обратно во вращение. Когда якорь динамо-машины вращался в магнитном поле для производства электрического тока и был соединен парой проводов с другим динамо-машиной, он обнаружил, что якорь другого динамо-машины вращается. Таким образом, он обнаружил, что механическая конструкция динамо-машины (или генератора, как мы назвали бы его сегодня) такая же, как у электродвигателя. Другие инженеры вскоре подхватили эту концепцию и улучшили ее. Хотя машины были грубыми, они были первыми коммерчески успешными электрическими машинами постоянного тока (DC), которые постепенно улучшались по мере накопления опыта работы с ними.
Машина Грамма имела «кольцевой якорь», как показано на рисунке 1. Недостаток кольцевого якоря заключался в том, что расположение катушек якоря имело тенденцию уменьшать магнитоэлектрический эффект якоря. Эта проблема была решена путем преобразования обмоток в барабанную форму, принятую Siemens (рис. 2).
2).
Рис. 1: Очень упрощенная схема электродвигателя Gramme.
с кольцевой арматурой. Он показывает основные части. Арматура построена вокруг
оси, но изолированы от нее. Коммутатор (не показан, но расположен на одном конце
якоря) соединяет проводку якоря с полем посредством
кисти. Таким образом, якорь подключается к полю «последовательно», что дает
нам «двигатель с последовательным возбуждением». Рисунок адаптирован автором из «Возобновляемых и эффективных систем электроснабжения» Гилберта М. Мастерса, IEEE.
Издательство, Wiley, 2013.
Рисунок 2: Схема
электродвигатель барабанного типа. Основное различие между этим и Gramme
конструкция заключалась в том, что обмотки находились снаружи якоря, а не
оборачивается вокруг кольца. Здесь показана только одна обмотка якоря, а там
на самом деле их было много. Принцип барабана оказался более эффективной конструкцией и
вскоре стал стандартом для большинства электродвигателей. Рисунок адаптирован
автор из Милн, А.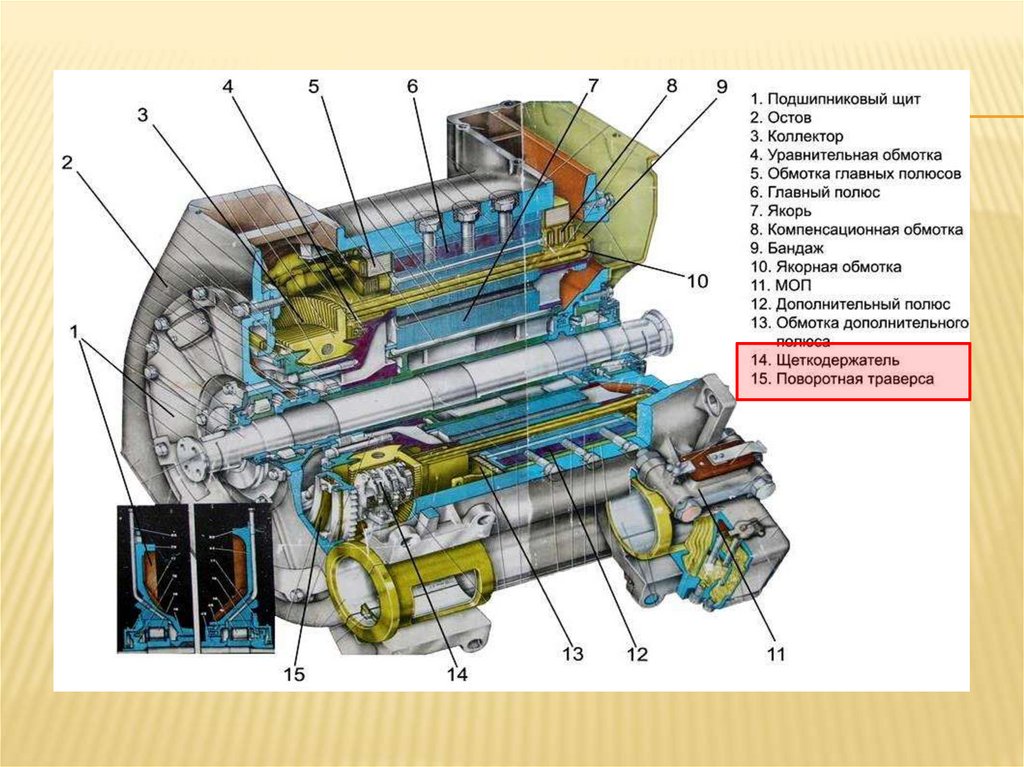 Г., (1971), январь. Энергетическое подразделение IEE:
Г., (1971), январь. Энергетическое подразделение IEE:
Обращение председателя. Да будет свет. В Трудах Института инженеров-электриков (Vol.
118, № 1, стр. 89-98). ИЭТ.
Конструкция Спрага
Двигатель Грамма работал, но был не очень эффективен, и американский инженер Фрэнк Дж. Спраг был убежден, что его можно улучшить. В конце 1883 и начале 1884 года Спраг работал над усовершенствованием двигателя. Двигатель постоянного тока состоит из вращающейся части, известной как якорь, и статической части, известной как поле. В ранних конструкциях поле обычно подключалось параллельно цепи якоря для создания магнитного поля, которое приводило бы к вращению якоря. Это было известно как двигатель с параллельным возбуждением, и ранние двигатели Sprague были спроектированы именно так. Позже он добавил последовательное поле, чтобы сделать то, что мы сейчас называем двигателем с комбинированной обмоткой. Это работало лучше в том, как он контролировал скорость двигателя.
Рис. 3: Двигатель Sprague № 6 с двухступенчатым редуктором и подковообразным магнитом, обернутым вокруг якоря. Две ножки подковы несли обмотки возбуждения. Рама двигателя подвешена между осью и рессорой на транце тележки. Рисунок: Cassier Журнал 1899 г., доработанный автором.
3: Двигатель Sprague № 6 с двухступенчатым редуктором и подковообразным магнитом, обернутым вокруг якоря. Две ножки подковы несли обмотки возбуждения. Рама двигателя подвешена между осью и рессорой на транце тележки. Рисунок: Cassier Журнал 1899 г., доработанный автором.
Тачка
Двигатель Sprague имел разумный успех. Он использовался для привода ткацких станков и других подобных машин с постоянной скоростью. Когда он начал продаваться, Спраг также использовал эту конструкцию в качестве основы для своих экспериментальных электрических тяговых двигателей для трамвайных вагонов. Во время этой разработки он внес еще один важный принцип для электрической тяги. Он считал, что двигатель должен быть установлен под автомобилем как можно ближе к колесам. Раньше двигатели обычно устанавливались внутри транспортного средства и соединялись с осью цепью или ремнем. Спрэг считал, что двигатель должен располагаться как можно ближе к оси и приводиться в движение через шестерню и шестерню.
Двигатель Sprague был установлен таким образом, что один его конец поддерживался осью, а другой поддерживался транцем рамы грузовика (тележки). Спраг назвал это дизайном «тачки». Сегодня это известно как мотор с носовой подвеской. Дизайн просуществовал более 100 лет.
Усовершенствования
Одной из распространенных проблем двигателей трамваев было загрязнение их грязью и водой. Ранние двигатели не были закрыты, конструкторы предполагали, что они будут достаточно защищены кузовом автомобиля. Однако поля и концы арматуры, где располагались коммутаторы, были открыты для непогоды и быстро повреждались водой, грязью, снегом или пылью. Пытаясь свести к минимуму ущерб, сначала были опробованы брезентовые чехлы, но в марте 189 г.Компания Westinghouse, занявшая первое место в США, которая за год до этого вышла на рынок производства двигателей, увидев успехи других поставщиков, произвела
первый тяговый электродвигатель, который включал в себя большинство требований,
стали стандартом: серийная обмотка якоря, катушки с машинной обмоткой и четыре
катушки возбуждения (рис. 4). Шесть месяцев назад компания Wenstrom произвела мотор.
4). Шесть месяцев назад компания Wenstrom произвела мотор.
где обмотки якоря помещались в пазы, вырезанные в сердечнике, а не
намотка на барабан — еще одна функция, которая стала стандартной.
Рис. 4. Двигатель Westinghouse № 3 1891 г., показывающий различные усовершенствования по сравнению с двигателем Sprague № 6 1888 г. Они включали откидную крышку, содержащую обмотки возбуждения, которая закрывала якорь и обеспечивала защиту, а также повышала производительность. Кроме того, зубчатая передача теперь одинарная, а шестерня и шестерня заключены в собственный маслонаполненный корпус. Большинство основ современного тягового двигателя постоянного тока теперь были на месте. Фото: журнал Кассиера 1899.
Шестерни
Было быстро признано, что для обеспечения эффективного крутящего момента на электрическом железнодорожном вагоне с двигателем, достаточно маленьким, чтобы поместиться под вагоном, привод, соединяющий двигатель с осью, должен иметь редуктор. Выбранные соотношения изначально были довольно высокими; Оригинальное двухступенчатое передаточное число Sprague для трамваев Richmond составляло 12:1. Ранние приводы имели две шестерни и две шестерни, но система плохо изнашивалась. Зубья шестерни изнашивались очень быстро, и они были шумными. Средний срок службы мотор-редуктора трамвая составлял около двух месяцев. Иногда шестерни заклинивали, что приводило к блокировке колес и остановке автомобиля.
Выбранные соотношения изначально были довольно высокими; Оригинальное двухступенчатое передаточное число Sprague для трамваев Richmond составляло 12:1. Ранние приводы имели две шестерни и две шестерни, но система плохо изнашивалась. Зубья шестерни изнашивались очень быстро, и они были шумными. Средний срок службы мотор-редуктора трамвая составлял около двух месяцев. Иногда шестерни заклинивали, что приводило к блокировке колес и остановке автомобиля.
Некоторые конструкторы пытались решить эту проблему, используя безредукторные двигатели, в которых якорь крепился непосредственно вокруг оси, но эти двигатели были тяжелее и менее эффективны, чем редукторные. Первый безредукторный двигатель был разработан Эдвардом Хопкинсоном для железной дороги Сити и Южного Лондона в 1890 году по предложению, первоначально сделанному за несколько лет до этого Уильямом Сименсом.
К середине 1890-х усовершенствование конструкции двигателя и редуктора достигло стадии, когда шестерни были достаточно надежными, а передаточное число обычно составляло от 3 до 4 к 1. При таком передаточном отношении требовался только один комплект шестерня/шестерня.
При таком передаточном отношении требовался только один комплект шестерня/шестерня.
Щетки
Хотя разные инженеры строили электромобили для использования на уличных железных дорогах, ни один из них не добился реального успеха, пока Спраг не оборудовал первый жизнеспособный электрический уличный трамвай в Ричмонде, штат Вирджиния, в 1888 году, используя свои двигатели с комбинированной обмоткой, но возникли значительные проблемы. Двумя самыми серьезными были: во-первых, моторы были маломощными в 7,5 л.с. во-вторых, уязвимость кистей. Со временем были установлены двигатели большего размера, но проблема с щетками осталась.
Щетки имели решающее значение для работы двигателя. Они соединили статическое поле с вращающимся якорем. Проблема заключалась в том, что до того времени щетки изготавливались из меди или латуни. Поскольку они были гибкими и должны были работать в обоих направлениях, они очень быстро изнашивались. Затем другой инженер в США, Чарльз ван де Пуле, выдвинул идею использования угольных щеток в 1890 году; проблема была на пути к решению, и их использование сохранилось и по сей день. Угольная щетка была усовершенствована патентом Хопкинсона, также от 189 г.0, который предложил поместить щетку в трубку и добавить пружину, чтобы поддерживать постоянное давление на коллектор.
Угольная щетка была усовершенствована патентом Хопкинсона, также от 189 г.0, который предложил поместить щетку в трубку и добавить пружину, чтобы поддерживать постоянное давление на коллектор.
Серийный двигатель
Большинство ранних тяговых двигателей имели параллельную обмотку, где обмотки возбуждения были подключены параллельно цепи якоря, за исключением первых двигателей Sprague с составной обмоткой. Мощность двигателя обычно регулировалась изменением сопротивления поля. Однако в 1891 году Вестингауз выпустил двигатель с последовательной обмоткой, в котором поле было подключено последовательно с якорем, а вся цепь двигателя управлялась переменным сопротивлением, которое включалось последовательно с двигателем при запуске, а затем постепенно отключалось для увеличения скорости. Опять же, это оставалось стандартным методом управления двигателем до введения твердотельного тиристорного управления в 19-м веке.80-е годы.
Конец начала
К началу 1890-х годов конструкция тягового двигателя постоянного тока была в основном решена, и он широко использовался на протяжении всего 20-го века. Он претерпел некоторые усовершенствования в производстве и усовершенствования конструкции коммутатора и проводки, но инженер из 1892 года мог взглянуть на двигатель, который до сих пор используется во многих электропоездах, и признать, что машина почти такая же, как его.
Он претерпел некоторые усовершенствования в производстве и усовершенствования конструкции коммутатора и проводки, но инженер из 1892 года мог взглянуть на двигатель, который до сих пор используется во многих электропоездах, и признать, что машина почти такая же, как его.
Однако с появлением твердотельной силовой электроники в 19В 70-х годах электродвигатель постоянного тока был забыт, и долгожданная цель — возможность использовать асинхронные двигатели переменного тока (AC) с трехфазным регулированием мощности — наконец стала близка. В настоящее время в сфере железнодорожной тяги двигатель постоянного тока все еще используется только в старых поездах.
AC Traction vs DC Traction — Гринвилл, Южная Каролина
ТЯГА ПЕРЕМЕННОГО ТОКА
Привод переменного тока (переменного тока), также известный как частотно-регулируемый привод, уже много лет является стандартом в промышленности. Хотя он использовался в локомотивах более двух десятилетий (особенно в Европе), только недавно цена приводов позволила использовать их в большинстве новых дизель-электрических локомотивов в Соединенных Штатах. Привод переменного тока работает путем преобразования выходного сигнала тягового генератора переменного тока в постоянный ток и обратного преобразования его в переменный ток переменной частоты, который питает тяговые двигатели переменного тока. Поскольку двигатели переменного тока работают примерно на частоте тока, приводы должны регулировать частоту таким образом, чтобы двигатели могли работать в диапазоне скоростей от нуля до максимальной скорости вращения.
Привод переменного тока работает путем преобразования выходного сигнала тягового генератора переменного тока в постоянный ток и обратного преобразования его в переменный ток переменной частоты, который питает тяговые двигатели переменного тока. Поскольку двигатели переменного тока работают примерно на частоте тока, приводы должны регулировать частоту таким образом, чтобы двигатели могли работать в диапазоне скоростей от нуля до максимальной скорости вращения.
Тяга переменного тока
для локомотивов представляет собой значительное улучшение по сравнению со старыми системами постоянного тока. Основными преимуществами тяги переменного тока являются уровни сцепления, которые на 100% выше, чем у постоянного тока, и гораздо более высокая надежность и снижение требований к техническому обслуживанию тяговых двигателей переменного тока.
Тяговое усилие локомотива (как переменного, так и постоянного) определяется уравнениями:
Тяговое усилие = Вес водителей x Сцепление
Сцепление = Коэффициент трения x Параметр сцепления локомотива
Коэффициент трения между колесом и рельсом обычно находится в диапазоне от 0,40 до 0,45 для относительно чистого, сухого рельса в нормальном состоянии и практически одинаков для всех локомотивов. Переменная сцепления локомотива представляет собой способность локомотива преобразовывать доступное трение в полезное трение на поверхности контакта колеса с рельсом. Он резко варьируется от примерно 0,45 для старых блоков постоянного тока до примерно 0,90 для современных блоков переменного тока. Эта переменная включает в себя множество факторов, включая конструкцию электрооборудования, системы управления, тип грузовика и состояние колес.
Переменная сцепления локомотива представляет собой способность локомотива преобразовывать доступное трение в полезное трение на поверхности контакта колеса с рельсом. Он резко варьируется от примерно 0,45 для старых блоков постоянного тока до примерно 0,90 для современных блоков переменного тока. Эта переменная включает в себя множество факторов, включая конструкцию электрооборудования, системы управления, тип грузовика и состояние колес.
Локомотивы постоянного тока первого поколения, такие как SW1200, GP9, SD40 и центральные кабины GE, обычно имеют уровень сцепления от 18% до 20%. Более современные устройства с контролем сцепления, такие как SD60 и Dash 8, имеют уровень сцепления от 25% до 27%. Новые тяговые устройства переменного тока, такие как SD80MAC и C44AC, обычно имеют сцепление от 37% до 39%. Таким образом, у новых локомотивов сцепление примерно в два раза выше, чем у старых единиц, а железные дороги класса I фактически обычно заменяют две старые единицы одной новой единицей переменного тока.
Есть три основные причины, по которым тяга переменного тока обеспечивает гораздо большее сцепление. Во-первых, в стандартном приводе постоянного тока, если происходит проскальзывание колеса, тяговый двигатель имеет тенденцию ускоряться и разгоняться, вплоть до механического отказа, если нагрузка не будет быстро снижена. По мере увеличения проскальзывания колес коэффициент трения также быстро падает до уровня 0,10 или меньше, а поскольку все двигатели соединены вместе, необходимо уменьшить нагрузку на весь локомотив. Следовательно, максимальное сцепление достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают в себя систему контроля проскальзывания колес, которая определяет начало пробуксовки и автоматически регулирует мощность, чтобы сохранить контроль. Это позволяет локомотиву безопасно работать в точке, близкой к его теоретическому максимуму.
Однако система переменного тока работает совсем по-другому. Преобразователь частоты создает вращающееся магнитное поле, которое вращается примерно на 1% быстрее, чем вращается двигатель. Поскольку скорость вращения ротора не может превышать скорость поля, любое проскальзывание колес минимально (менее 1%) и быстро обнаруживается приводом, который мгновенно снижает нагрузку на ось.
Преобразователь частоты создает вращающееся магнитное поле, которое вращается примерно на 1% быстрее, чем вращается двигатель. Поскольку скорость вращения ротора не может превышать скорость поля, любое проскальзывание колес минимально (менее 1%) и быстро обнаруживается приводом, который мгновенно снижает нагрузку на ось.
Затем локомотив постоянного тока обычно имеет несколько настроек дроссельной заслонки с установленным уровнем мощности для каждой из них. Хотя эта система проста и эффективна, она не обеспечивает постоянного крутящего момента двигателя, поскольку мощность является произведением крутящего момента и скорости. Таким образом, тяговое усилие значительно различается для каждого положения дроссельной заслонки в зависимости от скорости, что делает невозможным достижение максимального сцепления.
Однако локомотив переменного тока может регулировать крутящий момент двигателя до определенного уровня, позволяя тяговому усилию быть практически постоянным в более высоком диапазоне доступного сцепления. Эта быстродействующая система контроля проскальзывания колес может противодействовать любой пробуксовке колес, так что уровень крутящего момента может быть установлен близко к верхним пределам.
Эта быстродействующая система контроля проскальзывания колес может противодействовать любой пробуксовке колес, так что уровень крутящего момента может быть установлен близко к верхним пределам.
Третьим способом, которым тяга переменного тока обеспечивает улучшенное сцепление, является компенсация переноса веса. Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес на ведущей оси может быть снижен примерно на 20 %. Так как тяговое усилие пропорционально весу водителей, то в системе постоянного тока, где двигатели питаются от общего источника, тяговое усилие будет определяться самой легкой осью. Таким образом, фактически эквивалентная масса локомотива уменьшается примерно на 20%. Однако в системе переменного тока привод может компенсировать перенос веса. Когда ведущая ось становится легкой, система привода переменного тока снижает мощность на этой оси и подает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Сочетание устранения проскальзывания колес и компенсации переноса веса дает системе тяги переменного тока сцепление от 37% до 39% по сравнению с 18%-20% старых систем постоянного тока. Следовательно, локомотив с тягой переменного тока может обеспечить такое же тяговое усилие, как локомотив постоянного тока, весящий в два раза больше, или может дать вдвое большее тяговое усилие при той же массе.
GE и EMD добавили тягу переменного тока к своим магистральным агрегатам, а затем смогли заменить два старых агрегата постоянного тока одним новым локомотивом переменного тока. Республиканский локомотив пошел другим путем и решил сделать более легкий и менее затратный агрегат для промышленной коммутации. SW9 с питанием от постоянного тока/SW1200, производившийся в больших количествах с 1951 по 1965 год и использовавшийся для переключения тяжелых дворов, а также для обслуживания ответвлений, был принят в качестве эталона производительности. При массе от 230 000 до 240 000 фунтов эти агрегаты обычно рассчитаны на непрерывное тяговое усилие около 40 000 фунтов (несколько более высокое прерывистое, но ограниченное тяговыми двигателями и генераторами). AC Traction RX500 с тяговым усилием 144 000 фунтов и консервативным уровнем сцепления 35% рассчитан на непрерывное тяговое усилие 50 400 фунтов.
AC Traction RX500 с тяговым усилием 144 000 фунтов и консервативным уровнем сцепления 35% рассчитан на непрерывное тяговое усилие 50 400 фунтов.
При тяге переменного тока также важно учитывать торможение. Как и в случае с тягой, торможение зависит от веса водителей. Поэтому при использовании стандартного фрикционного торможения (гусеничных тормозов) тормозная способность локомотива (исключая торможение поезда) пропорциональна массе локомотива. Однако при тяге переменного тока торможение может быть намного выше, потому что система привода при торможении действует так же, как привод при тяге, что устраняет проскальзывание колес. Привод переводит двигатели в генераторный режим (динамическое торможение), и вырабатываемая электроэнергия рассеивается в тормозных резисторах. Таким образом, двигатели замедляют локомотив без использования пневматических тормозов. Опять же, уровень сцепления намного выше, поэтому локомотив снова может быть значительно легче при том же количестве торможений.
