

Содержание
Датчики управления лифтом, их типы и особенности
Статьи
|
Лифт является достаточно сложным в конструкционном плане типом оборудования, незаменимым в большинстве многоэтажных зданий, как жилого, так и производственного типа.
Он позволяет переводить за очень короткий промежуток времени большие грузы и людей, доставляя их на нужную высоту, максимально комфортным и безопасным образом.
Базовая составляющая лифта, это непосредственно сама кабина, которая движется по жестким рельсовым направляющим, располагающимся на стенках. Кабина поднимается и опускается с помощью лебедки, присоединенной к электродвигателю, находящемуся выше самой верхней точки остановки в специальном техническом помещении – лифтовой комнате. При этом уравновешивание кабины осуществляется за счет специального противовеса, а жесткие фиксирующие башмаки помогают лифту совершать аварийные остановки и всегда располагаться в одинаковом горизонтальном положении.
Однако на деле, помимо этих элементов, конструкция лифта подразумевает наличие специальных датчиков, количество и сложность которых напрямую зависят от конкретных задач лифта, его современности и желания самих создателей. С одной стороны, микропроцессорные датчики управления делают лифт намного более функциональным и умным, а с другой стороны, они упрощают электрическую схему устройства, позволяют предупредить и исключить множество ошибок, а также сделать всю конструкцию более безопасной, долговечной и удобной в использовании и обслуживании.
Разновидности датчиков и их особенности
Давайте более детально рассмотрим самые распространенные типы датчиков, и узнаем, на что они влияют, и для чего нужны.
- Абсолютно необходимым и встречающимся во всех современных конструкциях является датчик закрытия дверей лифта. Важно понимать, что сила закрытия дверей и так строго ограничена, для того, чтобы их можно было легко самостоятельно открыть вручную при любых обстоятельствах.
 Однако не менее важным моментом является и то, что фотоэлемент определяет, есть ли между створками какой-то объект и если это так, то двери в принципе не будут закрываться. Схожий механизм работает в стандартных автоматических раздвижных дверях, и нужен он для обеспечения дополнительной безопасности.
Однако не менее важным моментом является и то, что фотоэлемент определяет, есть ли между створками какой-то объект и если это так, то двери в принципе не будут закрываться. Схожий механизм работает в стандартных автоматических раздвижных дверях, и нужен он для обеспечения дополнительной безопасности. - Датчик скорости лифта. Еще одно важное решение, которое активирует автоматическую остановку в случае, если по какой-то причине в электродвигателе возникла поломка, и лифт начал двигаться вниз или вверх с большей скоростью, чем положено. Этот датчик при срабатывании легко может спасти немало жизней.
- Датчик положения лифта. В целях безопасности этот датчик позволяет открывать двери только в том случае, если лифт остановился в правильном месте, напротив входного проема. Особенно это актуально для широких шахт, где в межэтажном пространстве имеется большое расстояние от стенок до кабины.
- Датчик точной остановки лифта является еще одним барьером безопасности, необходимым для того, чтобы лифт работал только при правильном взаимодействии всех элементов.
 Однако не менее важным моментом является и то, что фотоэлемент определяет, есть ли между створками какой-то объект и если это так, то двери в принципе не будут закрываться. Схожий механизм работает в стандартных автоматических раздвижных дверях, и нужен он для обеспечения дополнительной безопасности.
Однако не менее важным моментом является и то, что фотоэлемент определяет, есть ли между створками какой-то объект и если это так, то двери в принципе не будут закрываться. Схожий механизм работает в стандартных автоматических раздвижных дверях, и нужен он для обеспечения дополнительной безопасности.
Помимо этого, в конструкциях часто встречаются следующие датчики:
- Датчик реверса лифта.
- Индуктивные датчики лифта.
- Датчики, размещающиеся под полом кабины.
- Датчики реверса.
- Многочисленные аварийные датчики.
Основная сложность работы с датчиками заключается в их правильном подключении и настройке, так как в большинстве своем они являются высокоточным оборудованием и их установкой должны заниматься опытные квалифицированные специалисты. Это же касается и выхода из строя датчиков, ведь их замена чаще всего требует максимально оперативной и грамотной замены. При этом важно отметить, что сами датчики не требовательны в плане затрат электроэнергии, так что при их использовании вам не потребуются крупные дополнительные расходы.
Где заказать профессиональные датчики для лифтов
Если вас интересуют высокоточные и надежные датчики для ваших лифтов или какие-то другие элементы лифтовых систем, заказать которые вы хотели бы по максимально доступной стоимости, тогда у нас найдется, что вам предложить. На протяжении многих лет наша компания специализируется на производстве лифтового оборудования и запчастей.
На протяжении многих лет наша компания специализируется на производстве лифтового оборудования и запчастей.
В своей работе мы используем самое современное оборудование и высококачественные расходные материалы, реализуя уникальные проекты любого объема и сложности. У нас вы сможете найти как типовые и популярные решения, так и обратиться для создания индивидуальных элементов по вашему заказу.
Мы всегда стремимся отыскать индивидуальный подход для каждого нашего клиента, стремясь удовлетворить все ваши запросы и стать надежными и долговременными партнерами, ведь наша помощь часть требуется в долгосрочной перспективе при повторном обслуживание и ремонте лифтового оборудования. При этом наши специалисты отлично разбираются во всех аспектах работы и смогут предоставить вам достойную консультацию по любому вопросу.
Датчик — точная остановка — Большая Энциклопедия Нефти и Газа, статья, страница 2
Cтраница 2
Для точной остановки лифта на уровне пола данного этажа предусмотрен датчик точной остановки ДТО. Последний представляет собой расположенный на кабине герметизированный контакт ( геркон), управляемый магнитным потоком постоянного магнита. В зоне точной остановки стальная полоса, установленная в шахте, шунтирует магнитную систему ДТО.
Последний представляет собой расположенный на кабине герметизированный контакт ( геркон), управляемый магнитным потоком постоянного магнита. В зоне точной остановки стальная полоса, установленная в шахте, шунтирует магнитную систему ДТО.
[16]
Кабина на заданном этапе останавливается с помощью индуктивного датчика ДТО ( датчика точной остановки), укрепленного на кабине. Магнитные шунты этого датчика установлены на уровне каждого этажа. Длина магнитных шунтов датчика точной остановки, установленных на крайних этажах, равна пути торможения кабины механическим тормозом, а длина шунтов, расположенных на промежуточных этажах, равна удвоенному пути торможения кабины механическим тормозом.
[17]
Кабина на заданном этаже останавливается с помощью индуктивного датчика ДТО ( датчика точной остановки), укрепленного на кабине. Магнитные шунты этого датчика установлены на уровне каждого этажа. Длина магнитных шунтов датчика точной остановки, установленных на крайних этажах, равна пути торможения кабины механическим тормозом, а длина шунтов, расположенных на промежуточных этажах, — удвоенному пути торможения кабины механическим тормозом.
[18]
Кабина на заданном этаже останавливается с помощью индуктивного датчика ДТО ( датчика точной остановки), укрепленного на кабине. Магнитные шунты этого датчика установлены на уровне каждого этажа. Длина магнитных шунтов датчика точной остановки, установленных на крайних этажах, равна пути торможения кабины механическим тормозом, а длина шунтов, расположенных на промежуточных этажах, равна удвоенному пути торможения кабины механическим тормозом.
[19]
| Установка этажного переключателя.
[20] |
От точности установки этажных переключателей механического действия, а также шунтов датчика точной остановки кабины зависит качество работы лифта. Этажные переключатели во время работы лифта взаимодействуют с комбинированной ог-зодкой, установленной на боковой стенке движущейся кабины, а шунты — с датчиком точной остановки, укрепленным на ее крыше. В связи с этим этажные пе-реключатели должны находиться на расстояния не менее 20 мм от выступающих частей отводки. Это же расстояние следует соблюдать между торцами осей резиновых роликов этажных переключателей и дном канала отводки. Что касается расстояния между шунтами и датчиком, оно должно быть выдержано з пределах 4 — б мм. Кроме того, по условиям взаимодействия подвижных и неподвижных приборов все этажные переключатели или датчики необходимо устанавливать строго по вертикальной оси.
В связи с этим этажные пе-реключатели должны находиться на расстояния не менее 20 мм от выступающих частей отводки. Это же расстояние следует соблюдать между торцами осей резиновых роликов этажных переключателей и дном канала отводки. Что касается расстояния между шунтами и датчиком, оно должно быть выдержано з пределах 4 — б мм. Кроме того, по условиям взаимодействия подвижных и неподвижных приборов все этажные переключатели или датчики необходимо устанавливать строго по вертикальной оси.
[21]
При подходе кабины к требуемой посадочной площадке система управления лифтом по сигналу датчиков точной остановки переключает электродвигатель лебедки на работу с пониженной частотой вращения ротора. Скорость движения кабины снижается, подается команда на остановку, и в момент, когда порог кабины совмещается с уровнем порога двери шахты, кабина останавливается, вступает в действие тормоз, включается в работу привод дверей, и двери кабины и шахты открываются.
[22]
Далее кабина, как и в типовой схеме, замыкает магнитный шунт датчика точной остановки и отключает реле РТО, контактор В и главный двигатель. Срабатывает тормоз и кабина останавливается; реле РД деблокируется. РТО и РД включается реле РОД и двери открываются для выхода пассажиров. Шина питания вызовов в течение 7 с остается отключенной, что дает возможность оставшимся в кабине пассажирам, нажав кнопку приказов, продолжать подъем, в результате чего двери автоматически закрываются и кабина начинает подниматься аналогично описанному.
[23]
Кабина на малой скорости подходит к уровню пятого этажа, в цепь датчика точной остановки ДчТО входит стальная полоса, установленная в шахте, контакт ДчТО разрывается и реле РТО отключается.
[24]
При подходе кабины к уровню промежуточного ( Я) — го этажа срабатывает датчик точной остановки ДчТО, отключаются реле РИТО и РТО, контакторы КМ и KB, тормозной электромагнит ЭмТ и двигатель лебедки Ml. Кабина останавливается на уровне заданного этажа.
Кабина останавливается на уровне заданного этажа.
[25]
На кабине установлены: ловители, привод открывания дверей, башмаки скольжения, датчик точной остановки, отводка этажных переключателей и электроток-контакты, отключающие лифт при открывании дверей, при обрыве или чрезмерной вытяжке тяговых канатов, при срабатывании ловителей.
[26]
На кабине установлены: ловители, башмаки скольжения, привод открывания дверей, датчик точной остановки, шунт датчиков замедления и электроблок-контакты, отключающие лифт лри открывании дверей, при обрыве или чрезмерной вытяжке тяговых канатов, при срабатывании ловителей.
[27]
На кабине установлены: ловители, башмаки скольжения, привод открывания дверей, датчик точной остановки, шунт датчиков замедления и злектроблок-контакты, отключающие лифт при открывании дверей, при обрыве или чрезмерной вытяжке тяговых канатов, при срабатывании ловителей.
[28]
На кабине установлены клещевые ловители, привод открывания дверей, башмаки роликового типа, датчик точной остановки, злектроблок-контакты, отключающие лифт при открывании дверей, при обрыве или чрезмерной вытяжке тяговых канатов и при срабатывании ловителей.
[29]
В зоне точной остановки стальная полоса, установленная в шахте, войдет в цепь датчика точной остановки ДчТО, в результате чего уменьшается действие управляющего магнитного потока на герметизированный контакт. Реле РТО отпадает, разрывая своими замыкающими контактами ( / 67 — 167) цепь питания катушки контактора KB, размыкающий контакт реле РТО ( 37 — 37А) в цегш реле открытия дверей РОД замыкается. Электродвигатель привода лебедки Ml и катушка тормозного электромагнита ЭМТ обесточиваются. Накладывается механический тормоз и кабина останавливается. После размыкания контактора KB отключается реле РД п своим размыкающим контактом ( 201 — 37) подаст питание на реле РОД; двери открываются.
[30]
Страницы:
1
2
3
4
Первый смарт-датчик присутствия в лифте
Abacus
Присоединяйтесь к нашему списку ожидания
Минимизируйте переполненность.
Максимальная эффективность.
Интеллектуальное управление плотностью лифтов.
Присоединяйтесь к нашему списку ожиданияПрочитайте наш информационный документ
ПРЕДСТАВЛЯЕМ ABACUS — ИНТЕЛЛЕКТУАЛЬНЫЙ ДАТЧИК, ПОМОГАЮЩИЙ ВАМ КОНТРОЛИРОВАТЬ И ЭФФЕКТИВНО УПРАВЛЯТЬ ПЛОТНОСТЬЮ ЛИФТА.
Первый умный лифт Датчик присутствия
Предотвращение ненужных остановок
Отслеживая внутреннюю часть лифта и определяя его занятость в режиме реального времени, Abacus знает, когда ваш лифт заполнен, и предотвращает ненужные остановки, отнимающие много времени, увеличивая пропускную способность лифта до 60%.
Соблюдение новых правил
Abacus упрощает соблюдение основных рекомендаций по охране здоровья, активируя ускоренную поездку, когда лифт заполнен, что автоматически минимизирует вероятность переполненности.
Принятие обоснованных решений
Со временем Abacus собирает обширные данные, отслеживает переполненность лифтов и отслеживает их использование, помогая вам управлять рисками и уверенно координировать повторный вход арендаторов.
Присоединяйтесь к нашему списку ожидания
С помощью Abacus ваши лифты получают интеллектуальные возможности без ущерба для конфиденциальности. Наш датчик выполняет всю обработку на устройстве для анонимного обнаружения людей внутри лифта.
В отличие от других решений для подсчета посетителей, Abacus рассматривает каждого человека как точку данных — без сохранения отснятого материала или потоковой передачи видео в облако, сохраняя конфиденциальность ваших пассажиров.
Подсчитывая эти точки данных, Abacus определяет, сколько людей находится в лифте в режиме реального времени. И как только лифт наполняется, Abacus приказывает лифту высадить этих пассажиров, прежде чем остановиться, чтобы забрать новых, что делает лифт более безопасным и быстрым для ваших арендаторов.
С помощью Abacus ваши лифты получают интеллектуальные возможности без ущерба для конфиденциальности. Наш датчик выполняет всю обработку на устройстве для анонимного обнаружения людей внутри лифта.
В отличие от других решений для подсчета посетителей, Abacus рассматривает каждого человека как точку данных — без сохранения отснятого материала или потоковой передачи видео в облако, сохраняя конфиденциальность ваших пассажиров.
Подсчитывая эти точки данных, Abacus определяет, сколько людей находится в лифте в режиме реального времени. И как только лифт наполняется, Abacus приказывает лифту высадить этих пассажиров, прежде чем остановиться, чтобы забрать новых, что делает лифт более безопасным и быстрым для ваших арендаторов.
С помощью Abacus ваши лифты получают интеллектуальные возможности без ущерба для конфиденциальности. Наш датчик выполняет всю обработку на устройстве для анонимного обнаружения людей внутри лифта.
В отличие от других решений для подсчета посетителей, Abacus рассматривает каждого человека как точку данных — без сохранения отснятого материала или потоковой передачи видео в облако, сохраняя конфиденциальность ваших пассажиров.
Подсчитывая эти точки данных, Abacus определяет, сколько людей находится в лифте в режиме реального времени. И как только лифт наполняется, Abacus приказывает лифту высадить этих пассажиров, прежде чем остановиться, чтобы забрать новых, что делает лифт более безопасным и быстрым для ваших арендаторов.
Устранение узкого места в лифте
Предотвращая ненужные остановки, Abacus восстанавливает эффективность лифта, утраченную из-за предела заполняемости, повышая пропускную способность лифта до 60%.
Увеличить заполняемость здания
Abacus не только повышает эффективность работы лифта, но и отслеживает использование лифта и время пиковой нагрузки, позволяя вам возвращать больше людей, не перегружая лифты.
Легкость арендатора
Беспокойство
Благодаря Abacus поездки на лифте становятся короче и в них меньше людей, что снижает риск для здоровья при поездке на лифте и решает ключевую проблему, препятствующую возвращению жильцов в здание.
Присоединяйтесь к нашему списку ожидания
и что это значит для будущего лифта
Лифты совершают около 18 миллиардов поездок ежегодно только в Соединенных Штатах. Несмотря на эту ошеломляющую цифру, работа лифтов мало изменилась за более чем столетие. В последние десятилетия системы диспетчеризации пунктов назначения обещали создать «умный лифт» и обеспечить более высокую производительность за счет того же набора лифтов. Однако эти системы улучшают производительность только при перемещении людей из вестибюля в здание. В этом техническом документе мы объясняем, как технология определения присутствия повышает эффективность работы лифта в другие пиковые периоды дня и почему эта возможность будет иметь важное значение для высотных зданий в постпандемическом мире. 9
На этой странице Статьи
Лифты очень подвержены инцидентам, связанным с безопасностью, в случае сбоев при выравнивании, поэтому необходимо усилить способность отслеживать связанные с этим отказы. В этой статье предложено новое устройство и метод мониторинга сбоев при выравнивании лифта, в котором сигналы лифта получаются от интерфейса CAN-шины лифта, передаются на удаленную платформу мониторинга через NB-IoT и сохраняются в нашем частном центре обработки данных. Сигнал датчика уровня, сигнал двери, сигнал вызова автомобиля, сигнал целевого этажа и сигнал движения получаются путем анализа данных, извлеченных из лифта. Логический анализ можно использовать для определения рабочего состояния лифта и сбоев, связанных с выравниванием. Устройство и метод могут выявлять, а также прогнозировать отказы, связанные с выравниванием, и иметь преимущества с точки зрения универсальности, точности и экономичности.
В этой статье предложено новое устройство и метод мониторинга сбоев при выравнивании лифта, в котором сигналы лифта получаются от интерфейса CAN-шины лифта, передаются на удаленную платформу мониторинга через NB-IoT и сохраняются в нашем частном центре обработки данных. Сигнал датчика уровня, сигнал двери, сигнал вызова автомобиля, сигнал целевого этажа и сигнал движения получаются путем анализа данных, извлеченных из лифта. Логический анализ можно использовать для определения рабочего состояния лифта и сбоев, связанных с выравниванием. Устройство и метод могут выявлять, а также прогнозировать отказы, связанные с выравниванием, и иметь преимущества с точки зрения универсальности, точности и экономичности.
1. Введение
За последние годы количество и время работы лифтов значительно увеличились; Между тем число отказов лифтов неизбежно увеличилось [1, 2]. В результате этой ситуации в отрасли были разработаны и внедрены технологии и системы мониторинга лифтов. Системы удаленного мониторинга, разработанные лифтовыми гигантами, представлены системой ONE™ компании Otis [3] в Америке, системой MelEye компании Mitsubishi [4] в Японии и системой E-Link™ компании KONE [5] в Великобритании. Эти системы постоянно контролируют рабочее состояние лифта, чтобы обнаруживать или даже прогнозировать отказы лифта в режиме реального времени. Однако эти системы дороги, а поскольку производители не публикуют протоколы [6–8], мы не знаем, как система осуществляет мониторинг, какие данные используются для мониторинга или какова структура данных, из чего следует, что эти системы ограничены в универсальности, поскольку они могут быть применены только к их собственной торговой марке. Эти проблемы тормозят продвижение систем мониторинга.
Эти системы постоянно контролируют рабочее состояние лифта, чтобы обнаруживать или даже прогнозировать отказы лифта в режиме реального времени. Однако эти системы дороги, а поскольку производители не публикуют протоколы [6–8], мы не знаем, как система осуществляет мониторинг, какие данные используются для мониторинга или какова структура данных, из чего следует, что эти системы ограничены в универсальности, поскольку они могут быть применены только к их собственной торговой марке. Эти проблемы тормозят продвижение систем мониторинга.
Когда лифт выровнен нормально, педаль кабины и педаль внешней двери холла находятся в одной плоскости, а выравнивание лифта помогает облегчить вход и выход людей, уменьшая при этом ненужные повреждения лифта [9]. Неверная оценка положения кабины лифта не только влияет на эффективность работы лифта, но также может вызвать ряд отказов, связанных с выравниванием. Когда положение кабины лифта получено неправильно, последствия аварии могут быть серьезными.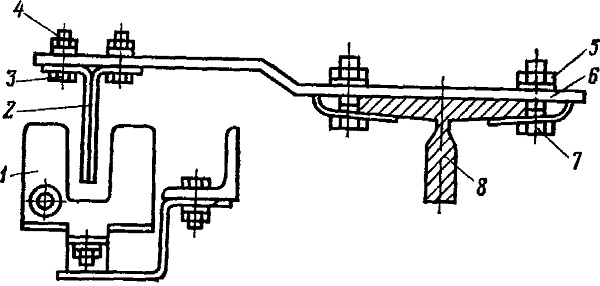 Ског и др. [10] использовали обработку сигналов для предупреждения и мониторинга безопасности лифта. Аномальные остановки были выявлены путем наблюдения за замедлением лифта. Луо и Фенг [11] разработали отказоустойчивую стратегию управления, основанную на нейронных сетях, и использовали фотоэлектрический кодировщик для реализации выравнивания лифта. Лай и Лю [12] смогли проанализировать и рассчитать целевые изображения пола кабины лифта и пола лифта, а также получить разницу в точке зрения между ними, чтобы определить, происходит ли сбой выравнивания лифта и вовремя ли подается сигнал тревоги. Тем не менее, эти исследования относительно изолированы от сбоев при выравнивании и не исследуют внутренние причины или не сочетаются с рабочим состоянием лифта. Кроме того, некоторые ученые также предложили свои собственные подходы, такие как наличие дополнительного нивелира [13] или высотомера [14] для контроля ошибок нивелирования. По сути, все они устанавливают датчики в шахте лифта, недостатки которых заключаются в сложности установки, высокой стоимости и возможности ложных срабатываний датчиков, что затрудняет продвижение приложения.
Ског и др. [10] использовали обработку сигналов для предупреждения и мониторинга безопасности лифта. Аномальные остановки были выявлены путем наблюдения за замедлением лифта. Луо и Фенг [11] разработали отказоустойчивую стратегию управления, основанную на нейронных сетях, и использовали фотоэлектрический кодировщик для реализации выравнивания лифта. Лай и Лю [12] смогли проанализировать и рассчитать целевые изображения пола кабины лифта и пола лифта, а также получить разницу в точке зрения между ними, чтобы определить, происходит ли сбой выравнивания лифта и вовремя ли подается сигнал тревоги. Тем не менее, эти исследования относительно изолированы от сбоев при выравнивании и не исследуют внутренние причины или не сочетаются с рабочим состоянием лифта. Кроме того, некоторые ученые также предложили свои собственные подходы, такие как наличие дополнительного нивелира [13] или высотомера [14] для контроля ошибок нивелирования. По сути, все они устанавливают датчики в шахте лифта, недостатки которых заключаются в сложности установки, высокой стоимости и возможности ложных срабатываний датчиков, что затрудняет продвижение приложения.
В этой статье мы получили данные лифта через интерфейс шины CAN между контроллером лифта и блоком управления внутри лифта, получили сигнал датчика выравнивания, сигнал целевого этажа и сигнал работы лифта посредством анализа данных и использовали логический анализ для определения рабочего состояния лифта и сбоев, связанных с выравниванием. Поскольку данные лифта передаются в режиме реального времени на удаленную платформу мониторинга, в случае сбоев выравнивания может потребоваться оперативное вмешательство.
Устройство и способ контроля отказов имеют следующие преимущества:
(и) универсальность. Современные лифты обычно используют интерфейс CAN-шины, и устройство и метод, описанные в этой статье, не ограничены маркой и моделью лифта (ii). Поскольку данные о работе лифта действительно собираются через последовательный порт лифта, и система сама логически комбинирует связанные с нивелированием отказы лифта; суждение о несостоятельности имеет высокий показатель успешности и характеризуется точностью(iii)экономичностью. Поскольку для сбора данных о работе лифта не используется большое количество датчиков, а данные о лифте собираются из интерфейса CAN-шины, стоимость строительства низкая, а установка проста, что способствует продвижению системы (iv) можно идентифицировать, а также прогнозировать отказы. Когда неисправный этаж является целевым или проходящим этажом, сигнал датчика выравнивания будет показывать соответствующее аномальное изменение, что позволяет идентифицировать и прогнозировать различные типы сбоев выравнивания
Поскольку для сбора данных о работе лифта не используется большое количество датчиков, а данные о лифте собираются из интерфейса CAN-шины, стоимость строительства низкая, а установка проста, что способствует продвижению системы (iv) можно идентифицировать, а также прогнозировать отказы. Когда неисправный этаж является целевым или проходящим этажом, сигнал датчика выравнивания будет показывать соответствующее аномальное изменение, что позволяет идентифицировать и прогнозировать различные типы сбоев выравнивания
2. Архитектура и методы
2.1. Схема сбора данных о лифте и метод передачи
В настоящее время этажи лифтов становятся все выше и выше, например, в жилых общественных лифтах, которые часто выше 30 этажей. Независимо от марки или модели лифта данные обычно передаются между контроллером и коммуникационной платой автомобиля с использованием последовательного метода, такого как интерфейс шины CAN [15]. В этой статье мы получили рабочие данные от интерфейса CAN-шины. Конкретный способ подключения коллектора данных, разработанный нашей исследовательской группой [8], показан на рис. 1.
Конкретный способ подключения коллектора данных, разработанный нашей исследовательской группой [8], показан на рис. 1.
Помимо питания и заземления (Vcc и Gnd), шина CAN лифта имеет две линии передачи данных, Can+ и Can-. Сборщик данных получает сигнал лифта от интерфейса CAN-шины лифта, а затем передает его на платформу удаленного мониторинга через модуль NB-IoT после обработки микроконтроллером. По сравнению с широко используемыми методами беспроводной связи, NB-IoT имеет более низкую стоимость устройств, более длительный срок службы батареи и расширенный охват [16]. Это особенно выгодно для удовлетворения требований беспроводной связи в течение длительного времени, легкого веса, высокой стабильности и широкого покрытия, что соответствует нашим потребностям. Как только сбой обнаружен, обслуживающий персонал может быть своевременно уведомлен для вмешательства. Система мониторинга лифта показана на рисунке 2.9.0003
2.2. Могут быть получены сигналы лифта
Типичные данные шины CAN лифта включают лифт STEP, использованный в эксперименте, включая индекс, время, имя, идентификатор, тип, формат, Len и данные. Хотя точная форма необработанных данных шины CAN различается в зависимости от лифта, наш подход к извлечению и анализу остается неизменным. В целом подход к анализу основан на принципе управляющих переменных, например, сравнение данных лифта в состоянии покоя на 1-м этаже с данными лифта в состоянии покоя на 2-м этаже без вмешательства других состояний, таких как двери и работает, чтобы найти данные, представляющие пол. Основываясь на вышеуказанном принципе и методах, следующие сигналы лифта могут быть получены путем анализа данных шины CAN лифта.
Хотя точная форма необработанных данных шины CAN различается в зависимости от лифта, наш подход к извлечению и анализу остается неизменным. В целом подход к анализу основан на принципе управляющих переменных, например, сравнение данных лифта в состоянии покоя на 1-м этаже с данными лифта в состоянии покоя на 2-м этаже без вмешательства других состояний, таких как двери и работает, чтобы найти данные, представляющие пол. Основываясь на вышеуказанном принципе и методах, следующие сигналы лифта могут быть получены путем анализа данных шины CAN лифта.
Сигнал двери отправляется из кабины на контроллер лифта, включая сигналы закрытия и открытия двери, которые обозначают, что дверь закрыта или открыта на месте соответственно. И сигналы движения двери, которые иногда уточняются до сигналов открытия и закрытия, чтобы указать, что дверь находится в движении.
Сигнал вызова кабины передается из кабины на контроллер лифта. В нормальных условиях всякий раз, когда генерируется сигнал автомобильного вызова, это означает, что кто-то вызывает этаж внутри лифта.
Сигнал целевого этажа, обычно посылаемый из кабины на контроллер лифта, обычно имеет форму бита для указания целевого этажа. Например, 01 означает, что звонит первый этаж, 10 означает, что звонит второй этаж, а 11 означает, что звонят первый и второй этажи одновременно.
Сигнал о движении посылается от контроллера лифта в кабину, чтобы указать, что лифт движется вверх или вниз. Сигнал движения лифта сбрасывается (низкий уровень), указывая на то, что лифт остановился на месте.
Сигнал датчика выравнивания отправляется из кабины на контроллер лифта, указывая на связь датчика выравнивания с перегородкой. Это включает в себя верхний сенсорный сигнал, когда верхний сенсорный узел датчика нивелирования обнаруживает нивелирующую перегородку, активируется верхний сенсорный сигнал. Точно так же есть сигналы с более низкой чувствительностью, полной чувствительностью и отсутствием чувствительности. Эти сигналы содержатся в 7-м байте кадра данных нивелирования (от старшего к младшему), начиная с 00 01. Формат этих сигналов варьируется в зависимости от поднятого/опущенного/статического состояния лифта. В результате работы по анализу данных сигналы датчиков нивелирования используемого в эксперименте подъемника STEP представлены в таблице 1.
Формат этих сигналов варьируется в зависимости от поднятого/опущенного/статического состояния лифта. В результате работы по анализу данных сигналы датчиков нивелирования используемого в эксперименте подъемника STEP представлены в таблице 1.
3. Результаты и обсуждение
Мы используем сигнал датчика нивелирования для определения метода отказа лифта следующим образом. После нормального выравнивания лифта педаль кабины и педаль внешней двери холла находятся в одной плоскости, и определение положения кабины имеет решающее значение для определения состояния выравнивания лифта. В настоящее время лифты обычно полагаются на напольный кодировщик и устройство выравнивания для определения положения кабины. Выравнивающее устройство обычно включает в себя датчик выравнивания и выравнивающую перегородку; датчик нивелирования устанавливается на кабину и перемещается вместе с ней вверх и вниз, а выравнивающая перегородка устанавливается в фиксированном положении в шахте лифта. Конкретная установка показана на рисунке 3. 9.0003
9.0003
Датчики нивелирования лифта обычно имеют фотоэлектрический и магнитный датчики, оба из которых используются для определения положения лифта с помощью сигнала между датчиком нивелирования и выравнивающей перегородкой. Датчик фотоэлектрического типа, который широко используется сегодня, имеет два сенсорных узла, верхний и нижний. Когда оба сенсорных узла обнаруживают перегородку, дверь лифта может быть точно выровнена с выходом лифта, чтобы обеспечить безопасный доступ персонала.
В качестве примера возьмем сигнал датчика уровня пола 2 при движении вверх (ситуация вниз аналогична направлению вверх). При вызове лифта внутри с 1 этажа на 2 этаж изменение сигнала датчика нивелирования 2 этажа (как целевого этажа) показано в таблице 2. При вызове лифта внутри с 1 этажа на этаж 3-й этаж (или более высокие этажи), т. е. 2-й этаж как проходной этаж; изменение сигнала датчика нивелирования показано в таблице 3.
Тем не менее, время от времени по-прежнему возникают сбои выравнивания из-за потери сигнала, смещения регулировочной перегородки и т. д. В это время изменение сигнала датчика выравнивания будет отличаться от показанного в таблицах 2 и 3.
д. В это время изменение сигнала датчика выравнивания будет отличаться от показанного в таблицах 2 и 3.
3.1. Leveling Stopping Failure
Если целевая перегородка выравнивания пола падает или не может быть обнаружена, лифт не остановится и не откроет дверь в обычном режиме, а вместо этого продолжит движение вверх/вниз, чтобы найти состояние выравнивания, которое обозначается как « сбой при остановке выравнивания» ниже.
Когда сбой остановки выравнивания происходит на 2-м этаже в качестве целевого этажа, после того, как лифт входит в диапазон выравнивания 2-го этажа, он не остановится и не откроет дверь нормально из-за отсутствия сигнала датчика полного выравнивания, но это будет статичен в течение короткого времени и выравнивается на полу поблизости. Соответственно изменение сигнала датчика нивелирования изменится с «01-09-0D-0C» на «01—00». То есть больше «00» и отсутствуют «09», «0D» и «0C». Конкретное значение можно соотнести с таблицами 1 и 2. Точно так же можно предсказать сбой выравнивания. Когда сбой при остановке выравнивания происходит на 2-м этаже в качестве проходного этажа, 7-й байт данных выравнивания изменится на: «01-01», постоянно повышается и не определяется, отсутствует «09».«0D «05», но поскольку 2-й этаж не является целевым этажом, лифт по-прежнему будет нормально подниматься вверх. Данные о лифте передаются в центр обработки данных системы мониторинга в режиме реального времени через плату сбора данных, чтобы в случае выравнивания без остановки отказа можно было сделать оценку и прогноз отказа на основе изменения последовательности сигналов.
Когда сбой при остановке выравнивания происходит на 2-м этаже в качестве проходного этажа, 7-й байт данных выравнивания изменится на: «01-01», постоянно повышается и не определяется, отсутствует «09».«0D «05», но поскольку 2-й этаж не является целевым этажом, лифт по-прежнему будет нормально подниматься вверх. Данные о лифте передаются в центр обработки данных системы мониторинга в режиме реального времени через плату сбора данных, чтобы в случае выравнивания без остановки отказа можно было сделать оценку и прогноз отказа на основе изменения последовательности сигналов.
Традиционно сбой при выравнивании можно было определить только тогда, когда лифт достиг этажа с ошибкой, что означает, что пассажиры должны испытать сбой выравнивания. Однако с системой мониторинга лифта, как только данные окажутся ненормальными, как описано выше, они будут обнаружены системой в режиме реального времени, и ей требуется только, чтобы лифт прошел через этаж, чтобы определить неисправность и предоставить раннее предупреждение. Возьмем в качестве примера 30-этажное общественное здание, вероятность того, что неисправный этаж окажется целевым этажом, составляет всего около 3%, в то время как 97% отказов могут быть обнаружены заранее, таким образом количество пассажиров, столкнувшихся с соответствующим отказом, может быть значительно уменьшено.
Возьмем в качестве примера 30-этажное общественное здание, вероятность того, что неисправный этаж окажется целевым этажом, составляет всего около 3%, в то время как 97% отказов могут быть обнаружены заранее, таким образом количество пассажиров, столкнувшихся с соответствующим отказом, может быть значительно уменьшено.
3.2. Сбой выравнивания выравнивания
Если перегородка выравнивания смещена из-за ослабленных винтов или других факторов, она обычно смещается вниз относительно нормального положения под действием силы тяжести. Когда лифт достигает нормального диапазона выравнивания, из-за смещения выравнивающей перегородки вниз, датчик выравнивания работает с более низким, а не с полным считыванием, и лифт не открывает дверь, а продолжает опускаться, чтобы найти состояние полного срабатывания. датчик уровня. Из-за отклонения от диапазона выравнивания энкодер определит, что лифт не находится в состоянии выравнивания, и внешняя дверь останется закрытой, а питание отключено.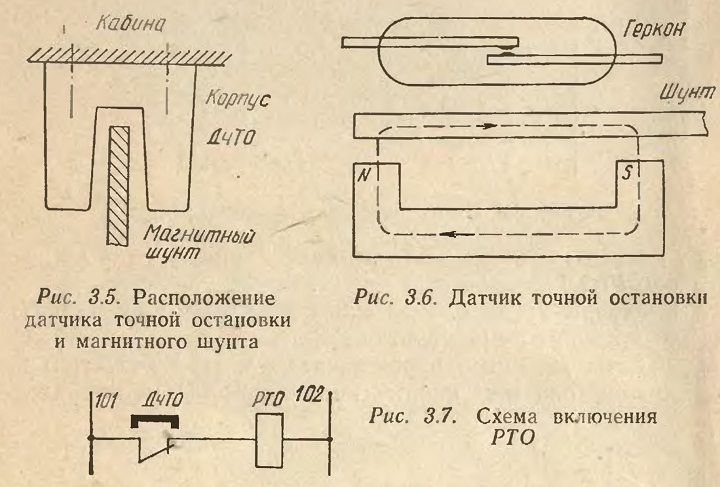 В этом случае возникает описанный ниже «сбой выравнивания выравнивания». В качестве примера возьмем 2-й этаж в качестве целевого этажа. Когда выравнивающая перегородка 2-го этажа опускается и происходит сбой выравнивания, изменение сигнала датчика выравнивания показано в Таблице 4.
В этом случае возникает описанный ниже «сбой выравнивания выравнивания». В качестве примера возьмем 2-й этаж в качестве целевого этажа. Когда выравнивающая перегородка 2-го этажа опускается и происходит сбой выравнивания, изменение сигнала датчика выравнивания показано в Таблице 4.
Видно, что когда у лифта происходит сбой выравнивания из-за опускания выравнивающей перегородки, существует изменение «09—0D—05—04—06—0E—0C» (таблица 4) по сравнению с нормальный разброс сигнала датчика нивелирования «09—0D—0C» (табл. 2). Когда происходит сбой, внутренняя дверь открывается, а внешняя дверь остается закрытой, что может привести к защемлению, если внутри находятся пассажиры.
Сигнал датчика выравнивания передается в режиме реального времени в центр обработки данных системы мониторинга, и сбой выравнивания лифта может быть идентифицирован на основе его последовательности изменения, и может быть выполнено своевременное техническое обслуживание.
3.3. Сбой цикла выравнивания
Лифт открывается только тогда, когда датчик выравнивания достигает полного состояния считывания. Однако, если выравнивающая перегородка становится короче из-за коррозии, разрушения или других причин, и ее длина меньше расстояния между верхним и нижним чувствительными узлами датчика выравнивания; датчик не сможет достичь состояния полного обнаружения, и лифт будет двигаться вверх и вниз в нормальном цикле диапазона выравнивания, не в состоянии выровнять пол. Это «сбой цикла выравнивания», который описывается следующим образом:
Однако, если выравнивающая перегородка становится короче из-за коррозии, разрушения или других причин, и ее длина меньше расстояния между верхним и нижним чувствительными узлами датчика выравнивания; датчик не сможет достичь состояния полного обнаружения, и лифт будет двигаться вверх и вниз в нормальном цикле диапазона выравнивания, не в состоянии выровнять пол. Это «сбой цикла выравнивания», который описывается следующим образом:
В качестве примера рассмотрим 2-й этаж. Если выравнивающая перегородка на 2-м этаже становится слишком короткой, чтобы позволить датчику выравнивания достичь своего полного состояния срабатывания, процедура вызова лифта внутри с 1-го этажа на 2-й этаж выглядит следующим образом: После того, как лифт обнаружит верхний датчик выравнивания. , он продолжает нормально подниматься к нижнему датчику нивелирования, но в это время верхний датчик нивелирования больше не обнаруживает перегородку. После короткой паузы лифт движется вниз, чтобы найти состояние полного восприятия. Когда датчик нижнего уровня срабатывает, датчик верхнего уровня больше не определяет перегородку. После небольшой паузы лифт движется вверх. Так далее и тому подобное, циклически вверх и вниз, пока не будет достигнуто состояние полного выравнивания. Изменение сигнала датчика уровня пола 2 при этой неисправности показано в таблице 5.
Когда датчик нижнего уровня срабатывает, датчик верхнего уровня больше не определяет перегородку. После небольшой паузы лифт движется вверх. Так далее и тому подобное, циклически вверх и вниз, пока не будет достигнуто состояние полного выравнивания. Изменение сигнала датчика уровня пола 2 при этой неисправности показано в таблице 5.
Это редкое явление, но когда это происходит, лифт будет циклически подниматься и опускаться в районе зоны выравнивания неисправного пола, не открывая дверь, причиняя серьезный физический и психический вред пассажирам. Кроме того, поскольку нормальная логика работы лифта заключается в поиске полного состояния обнаружения, лифт не будет активно определять неисправность. В датчике выравнивания отсутствует полное измерение «0D» между верхним измерением «09» и нижним измерением «05». Как только система мониторинга обнаружит такую аномалию в данных, она может идентифицировать сбой цикла выравнивания и подать сигнал тревоги.
Аналогичным образом, сигнал датчика нивелирования можно использовать для прогнозирования сбоя цикла нивелирования. При использовании 2-го этажа в качестве проезжей части, то есть при переходе пассажира с 1-го этажа на 3-й этаж (или выше) и прохождении через 2-й этаж, изменение сигнала датчика уровня показано в таблице 6.
При использовании 2-го этажа в качестве проезжей части, то есть при переходе пассажира с 1-го этажа на 3-й этаж (или выше) и прохождении через 2-й этаж, изменение сигнала датчика уровня показано в таблице 6.
В сравнении до нормального состояния в Таблице 3, можно обнаружить, что в датчике нивелирования отсутствует полное измерение «0D» между верхним измерением «09» и нижним измерением «05» в Таблице 6. Как только система мониторинга обнаруживает такие аномалии в данные, он может прогнозировать отказы и заранее уведомлять обслуживающий персонал о вмешательстве.
3.4. Метод мониторинга отказов, связанных с нивелированием
Подводя итог, можно сказать, что метод оценки отказов, связанных с нивелированием, заключается в следующем. Когда лифт достигает определенного этажа, он сначала определяет, является ли он целевым этажом или этажом пройденного на основе сигнала целевого этажа, а затем получает последовательность вариаций выравнивающего сигнала для текущего этажа и сравнивает ее с вариациями в обычном режиме. условия в таблицах 2 и 3. Если изменение отличается от нормального состояния, можно сделать вывод, что у лифта произошел сбой при выравнивании.
условия в таблицах 2 и 3. Если изменение отличается от нормального состояния, можно сделать вывод, что у лифта произошел сбой при выравнивании.
Кроме того, определяется конкретный тип отказа, и генерируется соответствующая идентификация или прогноз в сочетании с таблицами 4–6. Более того, если возникнет новый тип неизвестного отказа, мы можем добавить его варианты последовательности в систему мониторинга и постоянно обновлять и оптимизировать стратегию оценки отказа. Вышеприведенное описание относится к методу мониторинга, когда лифт движется вверх; конкретный сигнал, когда лифт движется вниз, отличается (как показано в таблице 1), но метод тот же.
Установка коллектора данных в реальном лифте показана на рисунке 4, который может быть сопоставлен с рисунком 1, где коллектор данных соединяет линии данных CAN+ и CAN- лифта и отправляет их на платформу удаленного мониторинга через модуль NB-IoT. В эксперименте мы использовали в качестве примера провал выравнивания 2-го этажа. Рабочее состояние лифта и неисправности, связанные с уровнем, могут быть отображены визуально. Страница платформы мониторинга при нормальном состоянии лифта показана на рисунке 5. Страница платформы мониторинга для определения отказа остановки выравнивания показана на рисунке 6. Страница платформы мониторинга для прогнозирования отказа остановки выравнивания показано на рисунке 7. Экспериментальные результаты подтверждают эффективность нашего устройства и метода.
Рабочее состояние лифта и неисправности, связанные с уровнем, могут быть отображены визуально. Страница платформы мониторинга при нормальном состоянии лифта показана на рисунке 5. Страница платформы мониторинга для определения отказа остановки выравнивания показана на рисунке 6. Страница платформы мониторинга для прогнозирования отказа остановки выравнивания показано на рисунке 7. Экспериментальные результаты подтверждают эффективность нашего устройства и метода.
4. Выводы
В этом документе извлекаются сигнал двери лифта, сигнал вызова кабины, сигнал целевого этажа, сигнал движения и сигнал датчика выравнивания, а затем отслеживаются сбои выравнивания путем анализа последовательности изменения сигнала датчика выравнивания лифта в реальном времени. . Определяется, нормально ли выравнивается лифт. Если происходит сбой выравнивания, тип сбоя идентифицируется на основе вариации выравнивания. На основании решения об отказе возможно своевременное техническое обслуживание.
Устройство и способ не ограничены маркой лифта и сигналом, поэтому имеют преимущества в универсальности. Кроме того, необработанные данные шины CAN собираются сборщиками данных и хранятся в нашем частном центре обработки данных, и они могут точно идентифицировать сбои с помощью логического анализа и недороги, поскольку не требуются дополнительные датчики. Благодаря мониторингу интерфейса CAN-шины лифта сбои выравнивания могут быть идентифицированы и предсказаны, как только сигнал датчика выравнивания покажет соответствующие аномальные изменения.
Кроме того, необработанные данные шины CAN собираются сборщиками данных и хранятся в нашем частном центре обработки данных, и они могут точно идентифицировать сбои с помощью логического анализа и недороги, поскольку не требуются дополнительные датчики. Благодаря мониторингу интерфейса CAN-шины лифта сбои выравнивания могут быть идентифицированы и предсказаны, как только сигнал датчика выравнивания покажет соответствующие аномальные изменения.
Доступность данных
Необработанные данные шины CAN собираются сборщиком данных и хранятся в нашем частном центре обработки данных. Если вы хотите получить более подробную информацию о данных шины CAN, пожалуйста, свяжитесь с нашей соответствующей почтой и укажите свое намерение и цель. Мы искренне рассмотрим ваш запрос на наше усмотрение и постараемся удовлетворить вас.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией данной статьи.
Благодарности
Прежде всего, мы хотим выразить нашу благодарность инженеру Чжицюну Луо и его коллегам из Гуандунского института инспекции и исследований специального оборудования за предоставление лифта для наших экспериментов. Мы хотели бы поблагодарить доктора Лей Нина за его помощь в создании среды NB-IoT, а также инженера Джун Ю за помощь в написании этой статьи. Исследование проводилось при поддержке Проекта научно-технического плана Администрации провинции Гуандун по регулированию рынка [2020ZT02], Проекта повышения научно-исследовательского потенциала ключевых строительных дисциплин в китайской провинции Гуандун [2021ZDJS109].] и Программа совместного обучения промышленных университетов Министерства образования Китая [202002321012].
Мы хотели бы поблагодарить доктора Лей Нина за его помощь в создании среды NB-IoT, а также инженера Джун Ю за помощь в написании этой статьи. Исследование проводилось при поддержке Проекта научно-технического плана Администрации провинции Гуандун по регулированию рынка [2020ZT02], Проекта повышения научно-исследовательского потенциала ключевых строительных дисциплин в китайской провинции Гуандун [2021ZDJS109].] и Программа совместного обучения промышленных университетов Министерства образования Китая [202002321012].
Ссылки
С. Л. Ту, З. Ю. Ву и Б. Цянь, «Исследование системы мониторинга лифтов на основе Интернета вещей», Прикладная механика и материалы , том. 423–426, стр. 2380–2385, 2013.
Посмотреть по адресу:
Сайт издателя | Google Scholar
К. П. Суббу и А. В. Василакос, «Большие данные для контекстно-зависимых вычислений — перспективы и проблемы», Исследования больших данных , vol. 10, стр. 33–43, 2017 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
«Otis ONE™ [EB/OL]», https://www.
otis.com/zh/cn/products-services/otis-signature-service/otis-one.Посмотреть по адресу:
Google Scholar
«Система мониторинга и управления MelEye [EB/OL]», http://www.mitsubishielectric.com/elevator/products/basic/elevators/control_system/index.html.
Посмотреть по адресу:
Google Scholar
«Kone Monitoring Solutions[EB/OL]», https://www.kone.cn/zh/new-buildings/advanced-people-flowsolutions/monitoringsolutions.aspx.
Посмотреть по адресу:
Google Scholar
В. Г. Бао и К. Цзун, Система удаленного мониторинга лифтов на основе шины CAN , Modern Machinery, Китай, 2005.
Дж. Чен, С. Ли , Чжан С., Ли Л., Ян Х., Ван С. «Система удаленного мониторинга энергопотребления лифта в зеленом здании на основе ARM», Modern Manufacturing Engineering , 2018.
Просмотр по адресу:
Google Scholar
Хуанг К., Цао Дж. М. и Сан Р. З., «Проектирование и внедрение системы предупреждения об отключении питания лифта», Journal of Physics: Серия конференций , том.
1621, артикул 012050, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
X. H. Pan, «Исследование системы мониторинга безопасности лифтов на основе технологии Интернета вещей», Wireless Connected Technology , vol. 20, pp. 62-63, 2016.
Просмотр по адресу:
Google Scholar
И. Ског, И. Карагианнис, А. Б. Бергстен, Дж. Харден, Л. Густафссон, П. Гендель, «Умный сенсорный узел для Интернета лифтов — неинвазивный мониторинг состояния и неисправностей», IEEE Sensors Journal , vol. 17, нет. 16, стр. 5198–5208, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. В. Луо и С. К. Фэн, «Диагностика неисправностей и отказоустойчивое управление датчиком нивелирования высокоскоростного лифта», Машиностроение и автоматизация , вып. 1, pp. 158–160, 2016.
Просмотр по адресу:
Google Scholar
Лай М. Г., Лю X Z., Хуанг Л. М., Чжун З. Ф. и др.
 otis.com/zh/cn/products-services/otis-signature-service/otis-one.
otis.com/zh/cn/products-services/otis-signature-service/otis-one. 1621, артикул 012050, 2020.
1621, артикул 012050, 2020.
