

Содержание
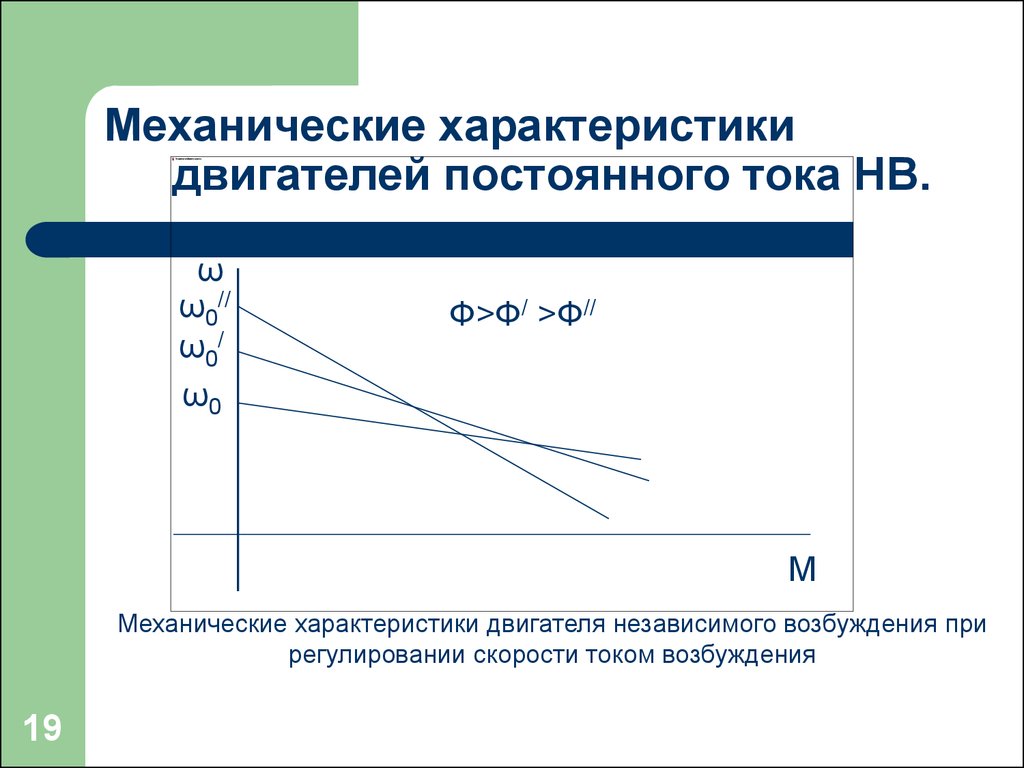
38. Механическая характеристика двигателя.
Механической характеристикой
двигателяназывается зависимость
частоты вращения ротора от момента на
валуn=f(M2). Так как при нагрузке
момент холостого хода мал, тоM2 ≈M и механическая
характеристика представляется
зависимостьюn=f(M). Если учесть взаимосвязьs= (n1 -n) /n1,
то механическую характеристику можно
получить, представив ее графическую
зависимость в координатахn и
М (рис. 1).
Рис. 1. Механическая характеристика
асинхронного двигателя
Естественная механическая характеристика
асинхронного двигателясоответствует
основной (паспортной) схеме его включения
и номинальным параметрам питающего
напряжения.Искусственные
характеристики получаются, если
включены какие-либо дополнительные
элементы: резисторы, реакторы, конденсаторы.
При питании двигателя не номинальным
напряжением характеристики также
отличаются от естественной механической
характеристики.
Механические характеристики являются
очень удобным и полезным инструментом
при анализе статических и динамических
режимов электропривода.
39.Основные точки механической характеристики: критическое скольжение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая
характеристика – это зависимость
вращающего момента от скольжения, или,
иначе говоря, от числа оборотов:
Из выражения
видно, что эта зависимость очень
сложна, поскольку, как показывают
формулы)и,
скольжение входит также в выражения
дляI2иcosϕ2.
Механическая характеристика асинхронного
двигателя дается обычно графически
Начальная точка
характеристики соответствует n=
0 иs= 1: это первое мгновение
пуска двигателя. Величина пускового
вращающего моментаMn–
очень важная характеристика эксплуатационных
свойств двигателя. ЕслиMnмал,
ЕслиMnмал,
меньше номинального рабочего момента,
двигатель может запускаться только
вхолостую или при соответственно
сниженной механической нагрузке.
Обозначим
символом Mnpпротиводействующий
(тормозной) момент, создаваемый
механической нагрузкой на валу, при
которой двигатель пускается. Очевидным
условием для возможности запуска
двигателя является:Mn>Mnp.
Если это условие выполнено, ротор
двигателя придет в движение, число
оборотов егоnбудет возрастать,
а скольжениеsуменьшаться.
Как видно из изображения выше, вращающий
момент двигателя при этом растет отMnдо
максимальногоMm,
соответствующего критическому
скольжениюskp,
следовательно, растет и избыточная
располагаемая мощность двигателя,
определяемая разностью моментовMиMnp.
Чем больше разность
между располагаемым моментом двигателя
(возможным при данном скольжении по
рабочей характеристике) Ми
противодействующимМnp,
тем легче режим запуска и тем быстрее
двигатель достигает установившейся
скорости вращения.
Как показывает
механическая характеристика, при
некотором числе оборотов (при s=skp)
располагаемый вращающий момент двигателя
достигает максимально возможного для
данного двигателя (при данном напряженииU)
значенияMт.
Далее двигатель продолжает увеличивать
скорость вращения, но располагаемый
вращающий момент его быстро уменьшается.
При каких-то значенияхnиsвращающий
момент двигателя становится равным
противодействующему: пуск двигателя
заканчивается, число оборотов его
устанавливается на значении, соответствующем
соотношению:
Это соотношение
является обязательным для всех нагрузочных
режимов двигателя, то есть для всех
значений Mnp, не
выходящих за пределы максимального
располагаемого вращающего момента
двигателяМт.
В этих пределах двигатель сам автоматически
приспосабливается ко всем колебаниям
нагрузки: если во время работы двигателя
его механическая нагрузка увеличивается,
на какое-то мгновениеMnpстанет
больше момента, развиваемого двигателем.
Обороты двигателя начнут снижаться, а
момент увеличиваться.
Скорость вращения
установится на новом уровне, отвечающем
равенству MиMnp.
При снижении нагрузки процесс перехода
к новому нагрузочному режиму будет
обратным.
Если нагрузочный
момент MnpпревыситМт,
двигатель сразу остановится, так как с
дальнейшим уменьшением оборотов
вращающий момент двигателя уменьшается.
Поэтому максимальный
момент двигателя Мтназывается
еще опрокидывающим или критическим
моментом.
Если в формулу
момента подставить:
и
то получим:
Взяв первую
производную от Мпои
приравняв ее к нулю, найдем, что
максимальное значение вращающего
момента наступает при условии:
то есть при таком
скольжении s=skp,
при котором активное сопротивление
ротора равно индуктивному сопротивлению
Значения skpу
большинства асинхронных двигателей
лежат в пределах 10 – 25%.
Если в написанную
выше формулу момента вместо активного
сопротивления r2подставить
индуктивное по формуле
получим:
Максимальный
вращающий момент асинхронного двигателя
пропорционален квадрату магнитного
потока (а значит, и квадрату напряжения)
и обратно пропорционален индуктивности
рассеяния обмотки ротора.
При постоянстве
напряжения, подводимого к двигателю,
его поток Фостается
практически неизменным.
Индуктивность
рассеяния роторной цепи тоже практически
постоянна. Поэтому при изменении
активного сопротивления в цепи ротора
максимальное значение вращающего
момента Mтизменяться
не будет, но будет наступать при разных
скольжениях (с увеличением активного
сопротивления ротора – при больших
значениях скольжения).
Очевидно, что
максимум возможной нагрузки двигателя
определяется значением его Mт.
Рабочая часть характеристики двигателя
лежит в узком диапазоне чисел оборотов
отn, соответствующегоMт,
до. Приn=n1(конечная
точка характеристики)М=
0, так как при синхронной скорости
ротораs= 0 иI2=
0.
Номинальный
вращающий момент, определяющий значение
паспортной мощности двигателя, принимается
обычно равным 0,4 – 0,6 от Mт.
Таким образом, асинхронные двигатели
допускают кратковременные перегрузки
в 2 – 2,5 раза.
Основным параметром,
характеризующим режим работы асинхронного
двигателя, является скольжение s –
относительная разность частоты вращения
ротора двигателя n и его поля nо:
s = (no —
n) / no.
Область механической
характеристики, соответствующая 0 ≤ s
≤ 1 – область двигательных режимов,
причем при s < sкр работа
двигателя устойчива, при s > sкр –
неустойчива. При s < 0 и s > 1 момент
При s < 0 и s > 1 момент
двигателя направлен против направления
вращения его ротора (соответственно
рекуперативное торможение и торможение
противовключением).
Устойчивый участок
механической характеристики двигателя
часто описывается формулой Клосса,
подстановкой в которую параметров
номинального режима можно определить
критическое скольжение sкр:
,
где: λ = Mkp /
Mн –
перегрузочная способность двигателя.
Механическая
характеристика по данным справочника
или каталога приближенно может быть
построена по четырем точкам (рис.7.1):
точка 1 – идеальный
холостой ход, n = no =
60 f / p, М = 0, где: р — число пар полюсов
магнитного поля двигателя;точка 2 — номинальный,
режим: n = nн,
М = Мн =
9550 Pн /
nн,
где Pн –
номинальная мощность двигателя в кВт;точка 3 – критический
режим: n = nкр,
М = Мкр =λ
Мн ;точка 4 – режим
пуска: n = 0, М = Мпуск =
β Мн.

При анализе работы
двигателя в диапазоне нагрузок до Мн и
несколько больше устойчивый участок
механической характеристики можно
приближенно описать уравнением прямой
линии n=n0-вМ,
где коэффициент “в” легко определяется
подстановкой в уравнение параметров
номинального режима nн и
Мн.
Механические характеристики асинхронных электродвигателей (лекция 4)
Похожие презентации:
Технология перевозочного процесса
3D печать и 3D принтер
Организация работы и расчет техникоэкономических показателей участка механической обработки детали
Грузоподъемные машины. (Лекция 4.1.2)
Видеокарта. Виды видеокарт
Безопасное проведение работ на высоте
Анализ компании Apple
Геофизические исследования скважин
Трансформаторы тока и напряжения
Транзисторы
1. Механические характеристики асинхронных электродвигателей
Курс1. Часть2. Регулирование
Часть2. Регулирование
частоты вращения
электроприводов постоянного и
переменного тока
Механические характеристики
асинхронных
электродвигателей
1.
2.
3.
1
Модель асинхронного электродвигателя.
Естественная механическая характеристика
асинхронного электродвигателя.
Управление пуском асинхронных
электродвигателей. Расчет пусковых реостатов
2. Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:
простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная надежность;
простота в ремонте и эксплуатации.
2
3. Модель асинхронного электродвигателя.
Асинхронного электродвигатели
изготавливают двух типов с фазным
и короткозамкнутым ротором.
0
3
4. Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым ротором
имеют обмотку ротора в виде «беличьей клетки». Она
постоянна замкнута в лобовых частях ротора при
помощи короткозамкнутых колец. К ним подсоединены
К ним подсоединены
стержни проводники, которые размещены в пазах
сердечника ротора.
4
5. Модель асинхронного электродвигателя.
а)
б)
в)
5
г)
6. Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х по
которой протекает переменный ток
iА = Im sin t; = 2 f1.
МДС FА, созданная этим током, будет пульсировать по
оси обмотки
FА = Fm sin t.
6
7. Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом
900 и пропускать по ней ток
iВ = Im cos t, то
МДС FВ будет пульсировать по оси этой обмотки
FВ = Fm cos t.
7
8. Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модуль
F
2
FA
2
FB
Fm const .
Его фаза определится из условия
FA
tg
tg t
FB
Таким образом, вектор результирующей МДС
вращается с угловой скоростью
8
2 f 1 .
9. Модель асинхронного электродвигателя.

Частота вращения магнитного поля n1 как и
угловая скорость ω1 находится в строгой зависимости от
частоты подводимого напряжения сети f1 и числа пар
полюсов р двигателя:
60 f 1
п1
,
p
9
2 f 1
1
.
p
10. Модель асинхронного электродвигателя.
Наведение в обмотке ротора ЭДС и появление
вращающего или тормозящего момента асинхронного
Двигателя возможно только при наличии разности
Между угловыми скоростями вращения магнитного
поля статора и ротора. Это различие оценивают в
относительных единицах и называют скольжением
10
1 2
S
.
1
11. Естественная механическая характеристика асинхронного электродвигателя
I1
Uф
Х1
Х0
R1
I 2
Х 2
R2
S
R0
Упрощенная схема замещения асинхронного электродвигателя
11
12. Естественная механическая характеристика асинхронного электродвигателя
2
Uф
R2 2
( R1
) ( X 1 X 2 )2
S
Вращающий момент асинхронного двигателя может
быть определен из выражения потерь :
1 S 3( 2
12
3( 2 ) 2 R2
) R2
.
1 S
3U ф 2 R2
2
R2 2
2
1 ( R1
) ( X 1 X 2 ) S
S
13. Естественная механическая характеристика асинхронного электродвигателя
2
13
1
1
2
14. Естественная механическая характеристика асинхронного электродвигателя
R2/ R12 S 2 ( X 1 X 2/ )2 S 2
dM 3 U ф R2
0,
2
/
2
/
2
2
dS
1
( R1 S R2 ) ( X 1 X 2 ) S
2
/
R2/ R12 S 2 ( X 1 X 2/ )2 S 2 0 R2/ R12 S 2 ( X 1 X 2/ )2 S 2
sк
Mк
14
R2
R12 ( X 1 X 2 )2
3U 2
2 0 R1 R12 ( X 1 X 2 )2
15. Естественная механическая характеристика асинхронного электродвигателя
Разделив уравнение механической характеристики на
выражение для максимального момента получим
2М к ( 1 Sк )
R1
М
, /.
S Sк
R2
2 S к
Sк
S
Приняв
2 S к q ,
окончательно получаем
15
М дв
М кр ( 2 q )
S кр
S
q
S кр
S
.
16. Естественная механическая характеристика асинхронного электродвигателя
16
17.
 Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристики
являются:
• пусковая точка – М=Мп; ω=0;
• точка провала на пусковой ветви, угловая скорость,
• в которой соответствует скольжению S=0,8; М=Ммин;
• критическая точка с координатами ωк, Мк;
• номинальная точка – ωн, Мн;
• точка холостого хода – ω=ω1; М=0.
17
18. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Кратность начального пускового момента двигателя
составляет
Мп
kм
1…1,8
Мн
а кратность начального пускового тока
Iп
k I 5…7
Iн
Отсутствие пропорциональности между моментом
двигателя и током статора во время пуска объясняется
значительным снижением магнитного потока.
18
19. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента и
снижения пускового тока применяются
короткозамкнутые двигатели специальных конструкций,
у которых ротор имеет две клетки, расположенные
концентрически, или глубокие пазы с высокими и
узкими стержнями.
19
20. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами начальный
пусковой момент увеличивается по мере возрастания
до известных пределов сопротивления реостата.
величина начального пускового момента может быть
доведена до величины критического момента.
пусковой ток при увеличении сопротивления
уменьшается.
20
21. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Mн
К расчету пускового реостата асинхронного двигателя
21
22. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:
•на характеристике Мдв=f( ), наносятся границы пуска;
•через точки d и d1 естественной механической
характеристики, соответствующие значениям моментов
Мпуск макс и Мпуск мин, проводится прямая до пересечения
с линией синхронной скорости (S=0) в точке t;
•из полученной точки проводится пусковая
характеристика до точки с координатами Мпуск макс, ω=0;
22
23.
 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
•в точке с координатами Мпуск мин, ω=ω3 происходит
отключение первой ступени реостата;
•в точке с координатами Мпуск мин, ω=ω2 происходит
отключение второй ступени реостата;
•отрезок [ed] пропорционален величине активного
сопротивления одной фазы ротора. Соответственно
отрезок [dc] в относительных единицах пропорционален
сопротивлению первой ступени пускового реостата,
отрезок [bс] – второй ступени.
23
24. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков, определяют величины
сопротивления каждой ступени пускового реостата:
R1
где
24
dc R
ed рот
R рот
U 2 н Sн
3I 2 н
.
R2
или
cb R
ed рот
R рот
Рн S н
3 2н н
2
.
25. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателя
с контактными кольцами поочередное закорачивание
ступеней пускового сопротивления может
производиться автоматически при помощи контакторов,
управление включением которых может осуществляться
в функции времени, частоты вращения, тока или
частоты тока ротора.
25
26. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы пуска необходима
фиксация моментов подачи команд на включение
контакторов. Это может осуществляться следующими
способами:
•путем отсчета промежутков времени Δt1, Δt2, Δt3,
для чего используются реле времени;
• посредством контроля значения скорости двигателя
или ЭДС ротора, что может быть сделано при помощи
датчиков скорости или ЭДС;
•применением датчиков тока;
•посредством контроля частоты тока ротора .
26
27. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
SB1
KM1
KM1
SB2
KM1
KT1
M2
KM4
M1
KM4
KM4
KT1:1
KT1:2
KM2
KM3
R31…R33
KM3
R21…R23
27
KM2
R11…R13
KT1:3
KM4
Схема электрическая принципиальная управления
пуском асинхронного двигателя в функции времени
28. Управление пуском асинхронного электродвигателя.
 Расчет пусковых реостатов
Расчет пусковых реостатов
Время пребывания на каждой ступени пускового
реостата определяется по следующему соотношению:
ti
о S нi
Мн
ln
М дин 1i
М дин 2i
,
Мдин 1i=Мпуск макс–Мсi; M дин 2i=Мпуск мин–Мсi.
28
English
Русский
Правила
1 из 39
шум
подшипники
трансмиссия
Реклама
Реклама
Механические характеристики электродвигателя
- МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ
МОТОР - ВВЕДЕНИЕ
При выборе двигателя для конкретного привода
учитываются также механические характеристики
счет.
Следующие особенности определяют пригодность
мотор.
Виды ограждений.
Подшипники
Шум
Передача привода - ТИПЫ КОЖУХОВ
- •Все основные части двигателей, такие как
обмотки, подшипники, изоляция и т.д.
защищен от загрязнения окружающей среды
воздух.
• В промышленности воздух, окружающий двигатели
может содержать металл, пыль, масло, туман, воду, пыль
легковоспламеняющиеся пары и т. д. также возможны несчастные случаи
возникают у лиц, контактирующих с
движущиеся части.
• Поэтому необходимо обеспечить надлежащее
ограждения.
• Различные типы корпусов
следует. - ОТКРЫТЫЙ ТИП
- • Этот тип можно использовать только там, где атмосфера и
окружающая среда свободна от всех загрязнений и
окружающий воздух совершенно сухой.
• Преимущество этого типа двигателя в том, что стоимость
охлаждение очень слабое.
• Но этот тип редко используется, так как нет защиты
к деталям двигателя. - С ЗАЩИТНЫМ ЭКРАНОМ ТИПА
- • В машинах этого типа предусмотрены отверстия для
вентиляция закрыты сетчатым экраном.
• Этот тип кожухов не защищает двигатель
против грязи и пыли.
• Но более крупные тела и большие насекомые не могут проникнуть в
машина. - КАПЛИЗАЩИТНЫЙ ТИП
- •Двигатель имеет вентиляционное отверстие
таким образом, чтобы капли жидкости
или твердых частиц, падающих на него вертикально, предотвращаются
войти внутрь.
•Двигатель этого типа нельзя использовать там, где
горючие частицы пыли присутствуют в
окружающий воздух.
• Такие двигатели используются во влажных
атмосфера. Например, насосные установки. - ПОЛНОСТЬЮ ЗАКРЫТЫЙ ТИП
- •Двигатели этого типа имеют прочную раму и
экраны, но без отверстий для вентиляции.
o Они охлаждаются только поверхностным излучением. В
машины этого типа никакая грязь или посторонние вещества не могут
войти и заблокировать проход воздуха.
• Эти машины используются для очень пыльных
атмосфера.
•Например, лесопильные заводы, заводы по переработке угля и камня.
дробление карьеров. - БРЫЗГОЗАЩИТНЫЙ ТИП
- •Вентиляционные каналы этого типа
таким образом, чтобы капли жидкости
или твердые частицы, достигающие машины в
любой угол между вертикалью и 100˚ от нее
не могу войти в машину. - ОГНЕЗАЩИТНЫЙ ТИП
- •Поэтому эти двигатели используются в угольных
шахты, газовые заводы, нефтеперерабатывающие заводы и т. д.,
где риск возгорания выше
•Эти корпуса не сообщают
внутреннего огня во внешнюю среду. - ТРУБА ВЕНТИЛЯЦИОННОГО ТИПА
- • Большой размер полностью закрытого двигателя
использовать трубную вентиляцию.
•Воздух всасывается через трубу снаружи
здание, где есть чистый воздух и
вынужден охлаждать двигатель. - ПОДШИПНИКИ
- Подшипники — детали машин,
дом и поддерживать главный вал.
Обеспечивает свободное вращение подвижных частей
с минимальным трением.
Обычно используются два типа подшипников.
занятых в двигателях.
• Шариковый или роликовый подшипник
• Подшипник скольжения или щетки - ШАРИКОВЫЙ ИЛИ РОЛИКОВЫЙ ПОДШИПНИК
- • Шариковый или роликовый подшипник состоит из внутреннего и внешнего
обойма и сепаратор, содержащие стальные ролики или шарики.
• Внешнее кольцо прикреплено к корпусу (конец
крышка), а внутреннее кольцо прикреплено к валу.
• При вращении вала стальной шарик также вращается.
Следовательно, трение вала сведено к минимуму.
• Он имеет более длительный срок службы и низкие затраты на техническое обслуживание.
• Он занимает меньше места. Но первоначальная стоимость мяча и
роликовые подшипники высокие.
• Он используется в трехфазном асинхронном двигателе, где
Возможен меньший воздушный зазор.
• Используется для цепных, ременных и зубчатых передач. - ВТУЛКА ИЛИ ЩЕТОЧНЫЙ ПОДШИПНИК
- • Подшипники скольжения или щеток обычно изготавливаются из
бронза.
• Вращающийся вал поддерживается подшипником
деталь и жестко закреплена на раме
машина.
• Обладает самосмазывающимися свойствами благодаря капиллярной
действие.
• Смазывается металлическим кольцом, свободно вращающимся на
вал, несущий масло к подшипникам.
• Он в основном используется в прямом приводе, таком как вентилятор.
и универсальный двигатель.
• Это обеспечивает бесшумную работу и долгий срок службы.
• Из-за большего износа подшипников этот тип
подшипник используется в асинхронном двигателе с большим воздушным зазором. - ТРАНСМИССИЯ ПРИВОДОВ
- Различные методы, используемые для
передачи механической энергии являются
описано ниже.
•Прямой привод
•Ремень безопасности
• Канатный привод
• Цепной привод и
• Шестеренчатый привод - ПРЯМОЙ ПРИВОД
- • При прямом приводе двигатель подключается напрямую
к ведомой машине с помощью
жесткая или гибкая муфта.
•Гибкая муфта защищает двигатель
от придурков.
• Это более эффективно и требует
минимум места и самый простой
метод.
• Его можно использовать там, где водят и водят
скорость машины одинакова. - РЕМЕННЫЙ ПРИВОД
- •В ременном приводе ремень используется для передачи
мощность от двигателя к ведомой машине
через систему шкивов.
• Механическая мощность теряется из-за
проскальзывание составляет около 3-4 процентов.
• Максимальная мощность 300 л.с. может быть
передается через этот диск. - ПРЕИМУЩЕСТВА
Большая гибкость в первоначальном проекте установки
возможный.
Обеспечивает удобное соотношение скоростей, тем самым обеспечивая высокую скорость
можно использовать двигатели.
Склонность к скольжению, особенно при тяжелых
нагрузка уменьшается, потому что он будет поглощать часть
удар внезапно приложенных нагрузок. - КАНАТНЫЙ ПРИВОД
- •Этот метод передачи электроэнергии
используется, когда невозможно использовать ремень
водить машину.
• Ряд канатов проходит в V-образных канавках
шкивы.
• Преимущества канатного привода
незначительное проскальзывание и способность принимать внезапные
нагрузки.
• В основном используется в лифтах и кранах. - ЦЕПНОЙ ПРИВОД
- •Цепной привод очень дорог по сравнению с
к ременной и канатной передаче.
• Его можно использовать для высокоскоростного отношения (до
6:1).
•Он более эффективен и передает большие
количество мощности.
Он бесшумный, нескользящий и плавный в
операция - ШЕСТЕРНЯ ПРИВОДА
- • Зубчатая передача используется при высоком
двигатель скорости должен управлять низкой скоростью
машина.
• Связь между ними
через коробку передач с подходящим передаточным числом. - ШУМ
Шум является еще одной важной характеристикой,
учитывать при выборе двигателя.
Он должен быть как можно ниже в
мастерских, больниц и других бытовых целей.
Шум может быть вызван подшипниками, вибрациями,
магнитные пульсации и неисправные фундаменты.
Для снижения шума в
место шаровых опор.
Двигатель должен быть установлен на тяжелом бетонном основании.
или чугунный блок.
Электрические соединения должны выполняться через
гибкие трубопроводы. - КОНЕЦ
 д. также возможны несчастные случаи
д. также возможны несчастные случаи





Реклама
Характеристики электродвигателя — EEEGUIDE.COM
Машина и нагрузка являются двумя компонентами электромеханической системы преобразования энергии, и характеристики электродвигателя, как правило, играют преобладающую роль в рабочих характеристиках полной системы.
При выборе электродвигателя необходимо с достаточной степенью точности знать его характеристику скорости и крутящего момента, и, кроме того, она должна быть надлежащим образом согласована с характеристиками электродвигателя механической нагрузки. Рисунок 5.59показывает характеристику скорость-момент асинхронного двигателя с нагрузкой вентиляторного типа (момент нагрузки примерно пропорционален квадрату скорости). Установившаяся рабочая точка — это точка пересечения P двух характеристик электродвигателя. Как видно из рис. 5.59, это устойчивая рабочая точка, и система «машина-нагрузка» возвращается к ней при воздействии кратковременного возмущения.
Как видно из рис. 5.59, это устойчивая рабочая точка, и система «машина-нагрузка» возвращается к ней при воздействии кратковременного возмущения.
Характеристики механической нагрузки можно классифицировать следующим образом:
1. Константа S скорость Нагрузки:
Они могут быть двух видов. Для некоторых нагрузок требуется приблизительно постоянная скорость при изменении крутящего момента нагрузки, например станки, гидравлические насосы, вентиляторы и т. д. Для некоторых специальных нагрузок, таких как приводы бумажной фабрики, требуется точно постоянная скорость, не зависящая от крутящего момента нагрузки.
2. Переменная S скорость вращения (или постоянная, кВт) Нагрузки:
Определенные нагрузки, такие как краны, подъемники и другие тяговые приводы, требуют высокого крутящего момента на низких скоростях и низкого крутящего момента на высоких скоростях, так что кВт, требуемый от сети, остается практически постоянным. Эта природа сообщается нагрузке везде, где требуется ускорение тяжелой инерции.
Эта природа сообщается нагрузке везде, где требуется ускорение тяжелой инерции.
3. Регулируемая S скорость Нагрузки:
Нагрузки с постоянной регулируемой скоростью, как в некоторых станках, или с переменной регулируемой скоростью, как в кранах. Диапазон регулировки скорости в некоторых приводах может быть очень требовательным.
Характеристики электродвигателя можно классифицировать как:
1. Типы двигателей с постоянной скоростью :
Скорость остается неизменной независимо от крутящего момента, как показано на рис. 5.60(a). Этими характеристиками электродвигателя обладает синхронный двигатель.
2. Шунт Тип:
Здесь скорость двигателя падает на несколько процентов от холостого хода до полной нагрузки, как показано на рис. 5.60(b). Этой характеристикой обладают как асинхронный двигатель переменного тока (в рабочей зоне), так и шунтирующий двигатель постоянного тока.
3. Серия T тип:
Здесь скорость резко возрастает по мере уменьшения момента нагрузки, как показано на рис. 5.60(c). Этим типом характеристик электродвигателя обладает двигатель постоянного тока, идеально подходящий для нагрузок тягового типа.
Характеристики ускорения ( пуск ) и замедления ( торможение ) систем двигатель-нагрузка также имеют одинаковое значение в их промышленном применении. Система должна быть способна выйти из состояния покоя на полную скорость и быть в состоянии быть остановлена за приемлемый период времени. Эти требования являются жесткими при пуске под нагрузкой и при быстром торможении и реверсе в некоторых специальных приложениях (приводы прокатных станов). Двигатель имеет три области работы — генератор , двигатель и торможение . В области генерации он возвращает тормозящую внутреннюю энергию обратно в электрическую сеть, не позволяя системе приобретать опасно высокие скорости — как при опускании подъемника или тяге вниз по уклону. В области торможения машина поглощает механическую энергию (а также некоторое количество электрической энергии) в виде потерь в ней, проявляющихся в виде тепла. Двигатель постоянного тока обладает превосходными пусковыми и тормозными характеристиками, намного превосходящими характеристики асинхронного двигателя переменного тока.
В области торможения машина поглощает механическую энергию (а также некоторое количество электрической энергии) в виде потерь в ней, проявляющихся в виде тепла. Двигатель постоянного тока обладает превосходными пусковыми и тормозными характеристиками, намного превосходящими характеристики асинхронного двигателя переменного тока.
Как и в случае двигателей, рабочая точка системы генератор-нагрузка определяется характеристиками двух электродвигателей, как показано на рис. 5.61 для шунтирующего генератора постоянного тока. То же самое и с генераторами переменного тока (синхронными). В современных системах генераторы, работающие параллельно, питают нагрузки, распределенные по географически обширным территориям через линии электропередачи. Система должна удовлетворять требованиям практически постоянного напряжения, так как нагрузка изменяется в широком диапазоне. Независимый генератор, питающий один двигатель, используется в некоторых схемах управления скоростью, в которых может потребоваться, чтобы напряжение на клеммах изменялось особым образом.
