

Содержание
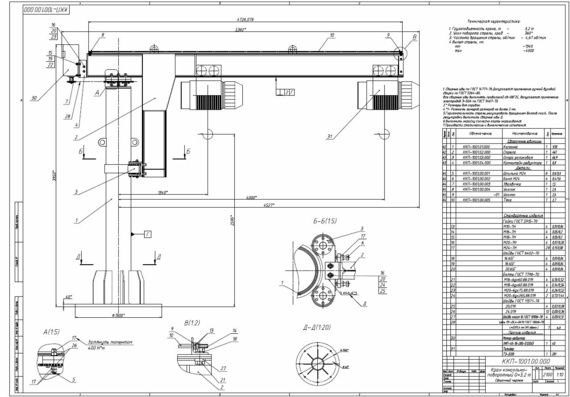
Чертеж конструкции поворотного консольного крана на неподвижной колонне грузоподъемностью 80 кН
+7 (343) 777-00-42 Пн-Вс c 7:00 -16:00 по Москве. Помощь
- Чертежи
- Транспорт и подъемные машины
- Подъемные-транспортные машины, краны
- Консольные краны
Добавить работу
Код: 03.01.02.08.99
Разместил: Чикунова Марина
Чтобы скачать чертежи – Зарегистрируйся и поучаствуй в развитии сайта
Как здесь скачать?
Поиск по словам: Механизм подъема, Механизм поворота, Поворотный кран, Кран консольный, Неподвижная колонна
Перечень чертежей:
- Чертеж общего вида поворотного крана на неподвижной колонне формата А1 с технической характеристикой:
- Грузоподъемность 80 кН
- Вылет крана 5 м
- Высота подъема груза 5 м
- Угловая скорость поворота крана 0,25 1/с
- Механизм поворота в сборе А1:
- Электродвигатель тип АИР100L4E(E2) мощность в 4 кВт, скорость вращения в 1410 об/мин
- Редуктор волновой Вз-315
- Скорость вращения 0,25 1/с
- Сборочный чертеж механизма подъема А1:
- Канат по ГОСТу 2688-80
- Тормоз ТКT-300
- Время подъёма груза 0,3 м/с
- Тормоз колодочный ТКТ-300 А1
Дополнительные материалы: прилагается расчетно-пояснительная записка на 16 листах.
В данной работе проектируется полноповоротный кран на неподвижной колонне, который состоит из механизма подъема и механизма поворота. Стрела представляет собой облегченную в целях экономии материала и уменьшения веса сварную конструкцию. Стрела крепится к колонне, вращающейся вокруг своей оси. Кран крепится к полу с помощью фундаментных болтов.
Вес поднимаемого груза 80 кН;
Скорость подъема 9 м/мин;
Угловая скорость поворота крана 0,25
Высота подъема 5 м;
Вылет крана 5 м;
Режим работы 6К
Выполнен расчет механизма подъема. Принята кратность полиспаста 2.
Произведен расчет и выбор каната. Определено разрывное усилие 244897,92 Н. Принят канат двойной свивки типа лк-р конструкции 6×19 ГОСТ 2688-80, диаметр каната 22,5 мм.
Приведен расчет барабана:
№ | Наименование | Значение |
1 | Диаметр барабана | 450 мм |
2 | Длина | 800 мм |
3 | Шаг нарезки | 24,75 мм |
4 | Толщина стенки | 19 мм |
5 | Напряжения сжатия в стенке барабана | 86,3 МПа |
Произведен выбор крюка и грузовой подвески.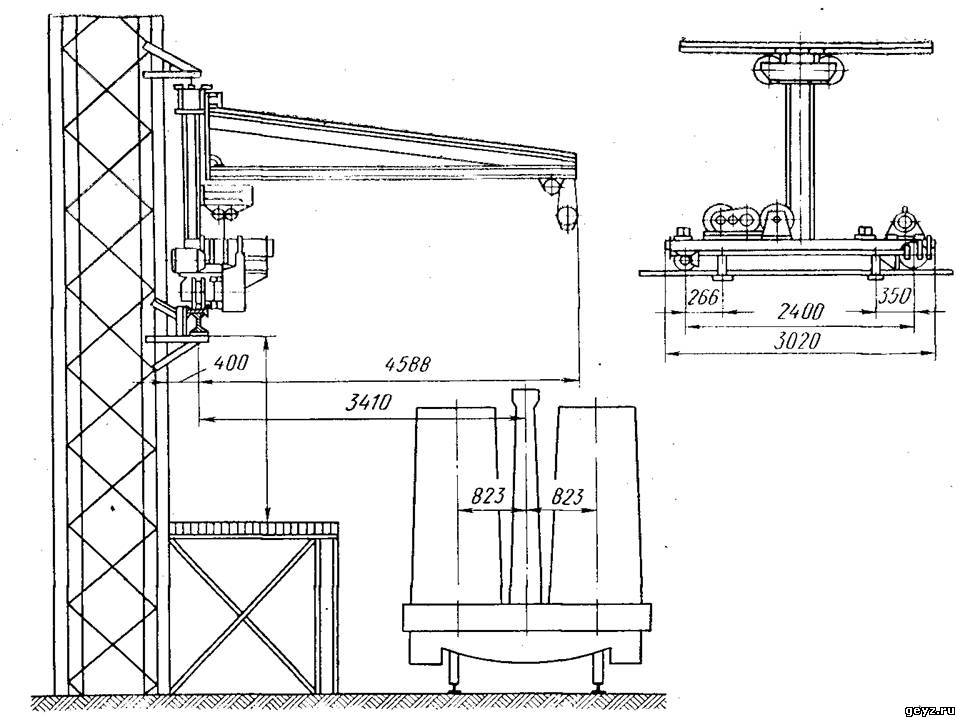
Выбран однорогий крюк, изготовленный ковкой из материала Сталь 20Г. Принята заготовка крюка – Заготовка крюка 17А ГОСТ 6627-74. Наибольшая грузоподъёмность крюка – 10 т. Масса – не более 37 кг.
Крюки монтируются в обоймах. Выбрана крюковая подвеска с верхним расположением блоков. Определена масса подвески 0,41 т.
Сделан выбор двигателя, редуктора и тормоза механизма подъёма.
Рассчитана мощность двигателя 12,9 кВт. Принят двигатель МТН-312-6 мощностью 15 кВт, число оборотов 960 об/мин.
Определена скорость наматывания на барабан 18 м/мин, частота вращения барабана 12,73 об/мин и передаточное число 75,42. Выбран цилиндрический трехступенчатый редуктор типа 1Ц3У 200.
Для выбора муфты определен номинальный момент, равный 149,21 Н×м. Принята втулочно-пальцевая муфта по ГОСТ 21424-93.
Определен расчетный тормозной момент 443,9 Н×м. Выбран колодочный тормоз с электромагнитами ТКТ-300.
Приведен расчет механизма вращения. Рассчитано сопротивление повороту механизмов 2226 Н×м.
Произведен выбор электродвигателя, редуктора, тормоза и муфты.
В данной работе разработана конструкция поворотного консольного крана на неподвижной колонне.
В программе: Компас 3D v, AutoCad
- Сопутствующие товары (6)
- Отзывов (0)
Зарегистрируйтесь, чтобы создать отзыв.
Личное меню
Кран Укосина: поворотная с талью, конструкция, характеристики
Содержание
Консольные краны на колонне – это техника специального назначения, опорный крановый механизм, который обычно обладает малотоннажными грузовысотными характеристиками.
Особенности конструкции
Конструкция крана консольного поворотного включает двутавровую консоль, как базу. Она закреплена на специальной колонне, которая прочно крепится к фундаменту с использованием специализированных кронштейнов. Рабочим органом выступает балка и стрела с установленным захватным крюком.
Основные узлы техники:
Кран консольно-поворотный
- консоль;
- колонна;
- опорный кронштейн;
- обкатная опора;
- тяговая цепь, фиксатор;
- упоры, крышки;
- подшипники, демпферы.

Устройства производят строго в соответствии с нормативной документацией, потому оно имеет фиксированные технические параметры. Конструкция консольных кранов на колонне регулируется ГОСТ-19811-74, где содержится детальный чертеж и требования.
Перемещение грузов производится по вертикали. Радиус действия оборудования зависит от технических параметров: угла поворота, вылета стрелы.
Разновидности грузоподъемных консолей
Классификацию устройств такого типа проводят по их мобильности. Кран консольный поворотный бывает:
Виды консольно-поворотных кранов
- стационарным – крепится на рабочем месте и не передвигается;
- передвижным – в установленных заранее рамках такое устройство может перемещаться.
Конструкция электрических консольно-поворотных кранов может быть оборудована ручным поворотом консоли. Такое решение позволяет использовать оборудование в местах, где не подведены источники электричества.
Настенное исполнение устройства отличается высокой надежной и эксплуатационными характеристиками. Механизм устанавливают на стену для перемещения грузов неподалеку от нее.
Механические приспособления управляются при помощи пульта. И ручные, и механические вариации оснащаются электрическими тельферами или ручными талями. Последний вариант используют для сравнительно нетяжелых материалов. Тельферы предназначены для работы с тяжелыми объектами.
Кран консольно-поворотный настенный
Варьирование грузовысотных характеристик
Возможность подъема грузов для консольных кранов на колонне варьируется в пределах от 0,5 до 16 тонн. Диапазон других характеристик:
- вылет стрелы, м – от 2,5 до 6 или 10;
- высота подъема, м – от 2 до 4 или 5.
Если угол поворота техники составляет 240 градусов, актуальны первые цифры – максимальный вылет стрелы 6 м и высота подъема 4 м.
Грузоподъемные характеристики консольно-поворотного крана
Основные характеристики
Основные технические параметры грузоподъемного оборудования:
Кран консольно-поворотный — размеры
- классификация по ГОСТу 25546 – 2К, по ISO 4301/1 – А2;
- выполнение – У, ХЛ, УХЛ;
- размещение по стандарту 15150 – 1, 2, 3, 4;
- привод поворота устройства и управление – ручное;
- управление талями – ручное, электрическое пультовое;
- положение управления – с пола;
- электропровод – подключение по кабелю;
- масса груза при испытаниях – 1.
 25 при статическом, 1.1 при динамическом испытании.
25 при статическом, 1.1 при динамическом испытании.
В последнем пункте указана часть от номинальной грузоподъемности, указанной в паспорте.
Видео по теме: Консольный кран
Источник
Консольный кран
Краны-укосина
КРАНДЕТАЛЬ изготавливает краны консольные неполноповоротные с ручным поворотом консоли грузоподъёмностью 1 т. Обычно заготовки в наличии — сборка крана занимает не больше 3-5 дней.
Стандартно комплектуем кран цепным электротельфером типа В производства Складова техника Болгария. Высота подъёма тельфера установлена заводом и составляет 3,2 м — высота крана по нижней полке консоли 3,9 м. Высота может быть и больше для этого: крайнее нижнее положение крюка можно запроектировать выше уровня пола или можно заказать цепь большей длины (время и небольшие дополнительные деньги). Вылет консоли 4 — 5 метров. Тележка передвижения тали может быть холостой (свободной) или механизированной с электрическим приводом. Китайцы уже достаточно давно делают цепные тали, полагаю качество на достойном уровне, продают в России под маркой TOR
Вылет консоли 4 — 5 метров. Тележка передвижения тали может быть холостой (свободной) или механизированной с электрическим приводом. Китайцы уже достаточно давно делают цепные тали, полагаю качество на достойном уровне, продают в России под маркой TOR
| Стоимость консольного крана и цепного электротельфера с НДС, руб | |||||
| с нижним расположением консоли | с верхним расположением консоли | с холостой тележкой | с электрической тележкой | ||
| Болгария | Китай | Болгария | Китай | ||
| 130000 | 140000 | 100000 | 70000 | 115000 | 80000 |
| заказать | |||||
Стоимость указана по состоянию на 17.10.19 г. Можем выполнить установку крана на готовый фундамент в пределах Перми.
Изначально разработали несколько конструктивных схем консольников, но прижилась одна: на собственной колоннес нижним расположением консоли с подкосом сверху. Упругие деформации (прогиб) консоли под действием груза значительно меньше при наличии подкоса — меньше сечение балки, металлоёмкость, ниже стоимость.
Упругие деформации (прогиб) консоли под действием груза значительно меньше при наличии подкоса — меньше сечение балки, металлоёмкость, ниже стоимость.
другие конструктивные схемы консольных кранов
| на собственной колонне с верхним расположением консоли | крепление к стене с нижним расположением консоли | крепление к стене с верхним расположением консоли |
Кран поставляется в разобранном виде для удобства транспортировки. Сборка несложная.
В ГОСТе опорная пластина выполнена круглой. Мы сделали её квадратной. Габарит принят исходя из условия оптимального раскроя листа стандартного размера 6000*1500 мм. Ещё ни один кран не упал.
Габаритные размеры опорной пластины и расположение отверстий под анкеры
Толщина пластины 20 мм. Анкерные болты М24. Отверстия в пластине имеют значительно больший диаметр для компенсации возможных отклонений расположения болтов. Под гайку на анкер устанавливается квадратная шайба с отверстием диаметром 25 мм. После установки и проверки крана шайбы привариваются.
Под гайку на анкер устанавливается квадратная шайба с отверстием диаметром 25 мм. После установки и проверки крана шайбы привариваются.
Источник
Консольный кран.
Кран укосина: поворотная с талью, технические характеристики, цена, расчет
Скоро близиться замена моего Коробаса-Барабаса, поэтому сообразил себе маленького помощника в гараж. Грузоподъёмность до 5000кг, т.е. максимум 400 кг(ведь 400 входит в 5000…значит можно писать). На самом деле ДВС с КПП в сборе тянет на ура, проверили на машине приятеля.
Таль цепная. Купил на 1т Китайского производства, почему именно на 1т? Ну в общем, какая попалась, и она без усилий поднимает задуманное.
Для тали нужна каретка, здесь надо постараться и сделать её самим. Как обычно все чертежи в конце статьи.
Очень проста в изготовлении.
Полный размер
Минимум деталей.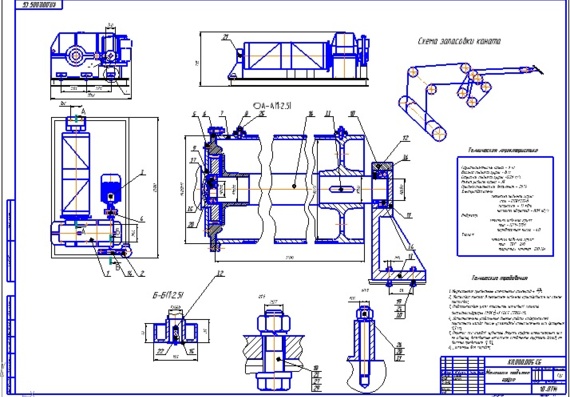
Подшипник 60202 — 4шт.
Далее изготавливаем раму. Для рамы потребовалась профильная труба 60х40х3мм 6 метров, и 2,5 метра 20х20х1,5.
Размеры похожи на правду.
Режим из уголка дополнительные упоры в стену.
Хорошо зачищаем для сварки.
Точим шарниры(завесы) у меня был шестигранник на 32мм из него и сварганил. Балка будет качаться на упорных шариковых подшипниках 8203.
К завесам приварил пластины, чтобы легче было приваривать к раме.
Единственное не делал на них чертежей, т.к. ну совсем всё просто. Отдаёшь токарю подшипники и забираешь готовое изделие.
Крепим стойку к стене и к балке перекрытия крыши. Для этого купил анкерные болты 10х100.
Полный размер
Внизу стойку закрепил в металлическом коробе.
Верх ещё не закреплён.
Ну и Воаля.
Полный размер
Всё катается и ворочается.
Полный размер
Компактно складывается к стене.
Первые испытания.
Тест прошёл на ура. 3 пузатых мужика 3х100=300 кг.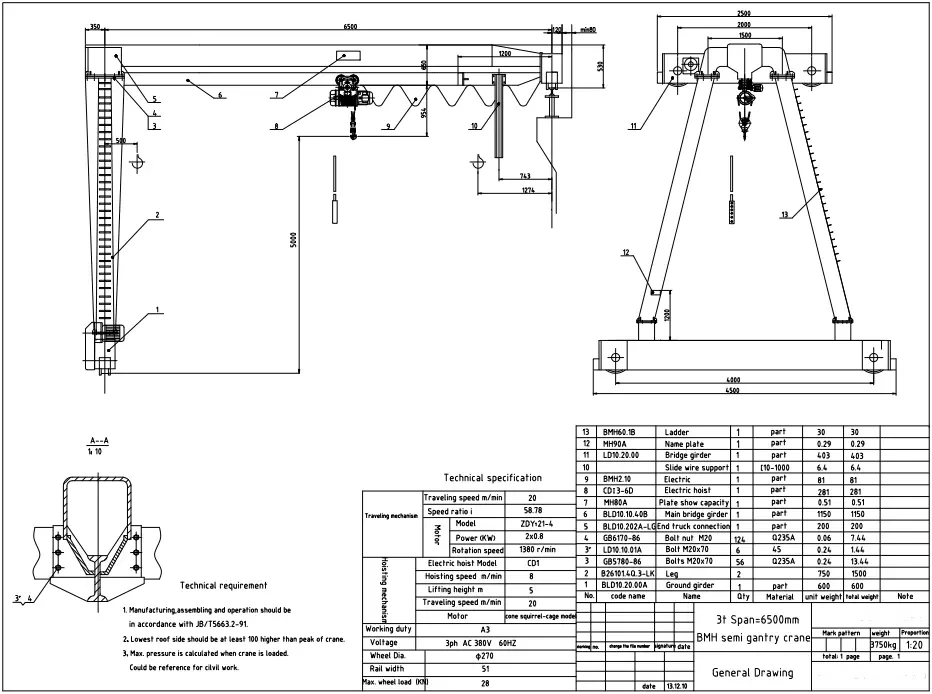
Первые испытания боем.
Полный размер
Очень удобно подсвечивать рабочую зону.
Как обещал даю ССЫЛКУ НА ЧЕРТЕЖИ. В ней нет завес.
ЦЕНА вопроса в белорусских рублях на 30.03.2016.
Подшипники 60202 4х25000=100000
Подшипники 8203 2х15000=30000
Труба 60х40х3 6х41000=246000
Труба 20х20х1,5 2,5=7800
Электроды 30000
Итого: 413800 или 21$
Остальное всё за спасибо обошлось
Спасибо за внимание.
Источник
Чертеж стрелового крана
Чертеж стрелового крана
Это программа на основе LISP для черчения стрелового крана с удобными диалоговыми окнами, которая является надстройкой для любой программы САПР для разработки чертежей общего вида, а также чертежей компонентов со спецификацией и весами всех компонентов для верхней части. Три конструктивных элемента, такие как балки, швеллеры и уголки, а также пластины и трубы используются для изготовления стрелового крана. Вы можете выбрать американский, британский или индийский стандарт размеров этих несущих элементов. Размеры элементов конструкции в соответствии со стандартом затем отображаются в диалоговых окнах. Чертеж изготовленной колонны. Чертеж стреловой рамы. Чертеж шарнира. Чертеж каретки. A Чертеж верхнего кронштейна. A Чертеж стопорного кронштейна. A Чертеж кабельного уголка. Чертеж фрикционного диска. A Чертеж прижимной подушки. A Чертеж крышки подшипника. Чертеж спецификации. запросить пробную программу и каталог. Инструкции по покупке: Вы можете отправить платеж с помощью кредитной карты или Банковский перевод . Как только я получу деньги, я отправлю программу LISP для Jib Crane по электронной почте. Купить подробнее. для нижней стрелы в системе фут-дюйм. для нижней стрелы в метрической системе. для загрузки пробного пакета. для загрузки инструкций по загрузке для комплекта стрелового крана. Скачать каталог стреловых кранов. |
 и нижний стреловой кран. Программа запрашивает все параметры, а затем автоматически рисует отдельные чертежи для каждого компонента с указанием ведомости материалов для этого компонента, а также веса каждого подкомпонента, а также общего веса. Затем программа LISP для стрелового крана рисует общий чертеж с указанием общего веса стрелового крана. В Пакете указаны все второстепенные детали непосредственно на этапе коммерческого предложения, что помогает наиболее конкурентоспособному коммерческому предложению. Программа LISP для стрелового крана может тянуть стреловой кран с пролетом до 6 метров, подъемом 4 метра и грузоподъемностью 3 тонны.
и нижний стреловой кран. Программа запрашивает все параметры, а затем автоматически рисует отдельные чертежи для каждого компонента с указанием ведомости материалов для этого компонента, а также веса каждого подкомпонента, а также общего веса. Затем программа LISP для стрелового крана рисует общий чертеж с указанием общего веса стрелового крана. В Пакете указаны все второстепенные детали непосредственно на этапе коммерческого предложения, что помогает наиболее конкурентоспособному коммерческому предложению. Программа LISP для стрелового крана может тянуть стреловой кран с пролетом до 6 метров, подъемом 4 метра и грузоподъемностью 3 тонны. Вы даже можете изменить эти значения. Если вы выбираете стандарт своей страны, вы можете указать размеры элементов конструкции в соответствии со стандартами вашей страны.
Вы даже можете изменить эти значения. Если вы выбираете стандарт своей страны, вы можете указать размеры элементов конструкции в соответствии со стандартами вашей страны. 
| Программа технологических сосудов | Обо мне |
Консольный кран | Справка AnyLogic
- Свойства
- Функции
Разметка MoveByCraneSpace для моделей погрузочно-разгрузочных работMaterial Handling Library Справочник по API — класс крана
| Стреловой кран в графическом редакторе | Стреловой кран во время выполнения модели в 3D-анимации |
Стреловой кран — элемент разметки пространства, который графически определяет башенный кран. Вы можете использовать блок библиотеки обработки материалов MoveByCrane для имитации того, как кран транспортирует агентов (материальные объекты) между двумя точками моделируемой среды.
Вы можете использовать блок библиотеки обработки материалов MoveByCrane для имитации того, как кран транспортирует агентов (материальные объекты) между двумя точками моделируемой среды.
Стреловой кран имеет два различных режима работы в зависимости от того, как его компоненты перемещаются по отношению друг к другу.
Максимальная высота, на которую может подняться агент (материальный объект) при подъеме стреловым краном, равна высоте самого крана.
Стреловой кран может служить препятствием на пути пешеходов и транспортных средств, перемещающихся в режиме навигации в свободном пространстве.
Элемент стрелового крана предоставляет пользователям набор действий, которые используются для определения дополнительного поведения агента.
Чтобы нарисовать кран
- Перетащите элемент Jib Crane из раздела Material Handling палитры Space Markup в графический редактор. Вы увидите форму круга с единственной горизонтальной формой стрелы крана.

- Кран может поднимать или сбрасывать материальные предметы непосредственно с пути, конвейера или железнодорожного пути. В этом случае следует подключить кран к соответствующему элементу разметки пространства, расположив его достаточно близко, чтобы форма крана была выделена зеленым цветом (это означает, что соединение установлено).
- После того, как кран будет успешно подключен, форма крана будет заполнена цветом, как показано на изображении ниже.
- Можно настроить начальный угол стрелы и ее длину.
- Вы можете установить сектор на периферии вращения крана, где стрела не может двигаться. Чтобы включить эту функцию для крана, выберите параметр Имеет заблокированную зону в представлении Свойства . Закрытую зону можно настроить из графического редактора.
- По умолчанию заблокированная зона крана всегда размещается так, как показано на изображении выше.
 Если вы поместите стрелу в эту область до включения зоны блокировки, движение крана во время движения модели будет невозможным, и возникнет ошибка.
Если вы поместите стрелу в эту область до включения зоны блокировки, движение крана во время движения модели будет невозможным, и возникнет ошибка. - Чтобы настроить внешний вид крана, выберите тип крана в представлении Свойства : либо Промышленный стреловой кран , Башенный кран Cat или Башенный кран с плоской опалубкой . Вы можете изменить Цвет крана в окне Свойства для всех типов и Цвет кабины для последних двух.
Свойства
- Общие
Наименование — Наименование стрелового крана. Имя используется для идентификации и доступа к крану из кода и блоков библиотеки обработки материалов.
Игнорировать — Если выбрано, стреловой кран исключается из модели.
Виден на верхнем агенте — Если выбрано, стреловой кран также виден на верхнем агенте, где живет этот агент.
Замок — Если выбрано, форма крана заблокирована.
 Заблокированные фигуры не реагируют на щелчки мышью — их невозможно выделить в графическом редакторе, пока вы их не разблокируете. Это часто необходимо, когда вы хотите предотвратить редактирование этой фигуры при рисовании других фигур поверх нее.
Заблокированные фигуры не реагируют на щелчки мышью — их невозможно выделить в графическом редакторе, пока вы их не разблокируете. Это часто необходимо, когда вы хотите предотвратить редактирование этой фигуры при рисовании других фигур поверх нее.Visible — Здесь вы указываете, будет ли фигура видимой в анимации во время выполнения модели или нет. С помощью элемента управления выберите да или нет .
Тип предмета материала — Тип предмета материала, который транспортируется этим стреловым краном.
Является препятствием — Если выбрано, этот стреловой кран будет считаться препятствием для пешеходов и транспортников, движущихся в режиме свободного пространства.
Режим движения компонента — Здесь вы можете выбрать, как стрела, тележка и крюк крана должны двигаться относительно друг друга. Варианты:
- Шаг за шагом — компоненты будут перемещаться по одному.
 Этот режим удовлетворяет условиям безопасности эксплуатации крана.
Этот режим удовлетворяет условиям безопасности эксплуатации крана. - Concurrent — перемещение всех компонентов будет выполняться одновременно. Этот режим значительно быстрее, чем режим Step-by-step , но не так безопасен.
Скорость тележки — Здесь можно указать скорость движения тележки крана. Свойство является динамическим, поэтому вы можете настроить изменение скорости во время выполнения в зависимости от того, загружен кран или нет. С помощью локальной переменной isLoaded логического типа можно, например, настроить изменение скорости с помощью условного оператора: isLoaded ? agent.mySpeed: 1. Когда кран разгружается, переменная агента имеет значение null. Если вы не указали конкретное значение скорости для ненагруженного крана, тележка будет двигаться со скоростью по умолчанию 0,5 метра в секунду.
Скорость подъема — Здесь вы можете определить скорость подъема подъемника. Свойство является динамическим, поэтому вы можете настроить изменение скорости во время выполнения в зависимости от того, загружен кран или нет.
 С помощью локальной переменной isLoaded логического типа можно, например, настроить изменение скорости с помощью условного оператора: isLoaded ? agent.mySpeed: 1. Когда кран разгружается, переменная агента имеет значение null. Если вы не указали конкретное значение скорости для ненагруженного крана, подъемник будет двигаться со скоростью по умолчанию 0,1 метра в секунду.
С помощью локальной переменной isLoaded логического типа можно, например, настроить изменение скорости с помощью условного оператора: isLoaded ? agent.mySpeed: 1. Когда кран разгружается, переменная агента имеет значение null. Если вы не указали конкретное значение скорости для ненагруженного крана, подъемник будет двигаться со скоростью по умолчанию 0,1 метра в секунду.Скорость вращения стрелы — Здесь вы можете определить скорость вращения стрелы крана. Свойство является динамическим, поэтому вы можете настроить изменение скорости во время выполнения в зависимости от того, загружен кран или нет. С помощью локальной переменной isLoaded логического типа можно, например, настроить изменение скорости с помощью условного оператора: isLoaded ? agent.mySpeed: 1. Когда кран разгружается, переменная агента имеет значение null. Если вы не указали какое-либо конкретное значение скорости для ненагруженного крана, стрела будет вращаться со скоростью по умолчанию 0,5 оборота в минуту.

- Шаг за шагом — компоненты будут перемещаться по одному.
- Действия
Во всех действиях текущий материальный элемент доступен как локальный переменный агент.
При отказе — Здесь вы можете ввести код Java, который будет выполняться в случае отказа стрелового крана.
При ремонте — Здесь вы можете ввести код Java, который будет выполняться при ремонте стрелового крана.
При загрузке — Здесь вы можете ввести код Java, который будет выполнен сразу после того, как стреловой кран захватит материал.
При разгрузке — Здесь вы можете ввести код Java, который будет выполнен сразу после того, как стреловой кран освободит материальную единицу.
- Внешний вид
Тип — Здесь вы можете выбрать тип крана: промышленный консольный кран , башенный кран Cat или башенный кран с плоской опалубкой .
Промышленный стреловой кран
Козловой башенный кран
Плоский башенный кранВы меняете только внешний вид крана: ваш выбор не влияет на логику его работы.
Цвет кабины — [Отображается, если для параметра Стиль установлено значение Башенный кран с кошачьей головкой или Башенный кран с плоской опалубкой ] Цвет заливки кабины крана. Выберите No color , если вы не хотите, чтобы область была заполнена.
Цвет крана — Цвет формы крана. Выберите No color , если вы не хотите, чтобы область была заполнена.
- Положение и размер
Уровень — Уровень, к которому принадлежит этот элемент.
X — X-координата точки, где находится кран.
Y — Y-координата точки, где находится кран.
Z — Z-координата точки, где находится кран.
Длина стрелы — Здесь можно указать длину стрелы крана.
Высота крана — Здесь можно указать высоту самого стрелового крана.
Начальный угол стрелы — Здесь можно указать начальный угол стрелы крана в положительных или отрицательных градусах или радианах.
 Графическая подсказка, расположенная справа от элемента управления, отображает заданный угол.
Графическая подсказка, расположенная справа от элемента управления, отображает заданный угол.Положение тележки — Здесь можно указать исходное положение тележки крана.
Заблокировал зону — Если выбран этот параметр, вы можете определить сектор на периферии вращения крана, куда стрела не сможет войти.
Начальный угол зоны — [Виден, если выбран параметр Имеет заблокированную зону ] Здесь вы можете указать угол, под которым будет начинаться заблокированная зона. Графическая подсказка, расположенная справа от элемента управления, отображает заданный угол.
Угол зоны , ° — [Виден, если выбрано Имеет заблокированную зону ] Здесь вы укажете сектор самой заблокированной зоны. Он будет рассчитываться, начиная с.
- Расширенный
Показать в — Здесь вы можете выбрать, хотите ли вы, чтобы форма отображалась как в 2D, так и в 3D анимации, или только в 2D , или только в 3D .

Показать имя — Если выбрано, имя фигуры отображается на графической диаграмме.
Для регулировки начального угла стрелы
- Перетащите ручку, расположенную на конце формы стрелы, по часовой стрелке или против часовой стрелки, чтобы задать начальный угол стрелы. Чтобы предотвратить изменение текущей длины стрелы в процессе, нажмите и удерживайте клавишу Shift при перетаскивании ручки.
- При перемещении рукоятки фактический угол стрелы будет отображаться в строке состояния AnyLogic.
Для регулировки длины стрелы
- Перетащите ручку вдоль формы стрелы, чтобы изменить длину стрелы. Чтобы предотвратить изменение начального угла стрелы в процессе, нажмите и удерживайте клавишу Ctrl при перетаскивании ручки.
- При перемещении рукоятки фактическая длина стрелы будет отображаться в строке состояния AnyLogic.
Чтобы настроить зону блокировки крана
- Чтобы включить зону блокировки крана, выберите параметр Имеет зону блокировки в представлении Свойства крана .
 В графическом редакторе он будет отображаться в виде синего сектора формы круга журавля. Сектор будет иметь две ручки для регулировки.
В графическом редакторе он будет отображаться в виде синего сектора формы круга журавля. Сектор будет иметь две ручки для регулировки. - Перетащите синюю ручку по часовой стрелке или против часовой стрелки, чтобы указать, где угол, где должна начинаться заблокированная зона крана.
- Чтобы предотвратить изменение текущего размера заблокированной зоны, нажмите и удерживайте кнопку Ctrl, перетаскивая синий маркер.
- Перетащите белую ручку, чтобы настроить размер заблокированной зоны.
- Если вы хотите увеличить или уменьшить заблокированную зону, изменив начальный и конечный углы в равной степени, нажмите и удерживайте клавишу Shift, перетаскивая любой маркер.
Функции
Вы можете динамически изменять свойства крана во время выполнения модели, используя следующий API.
- Рабочее состояние
Функция Описание логическое значение isReady() Возвращает true, если кран готов к работе, в противном случае возвращает false. 
логическое значение isFailed() Возвращает true, если кран вышел из строя (сломался) и не работает, в противном случае возвращает false. логическое значение isLoaded() Возвращает true, если кран в данный момент загружен материальным предметом. В противном случае эта функция возвращает false. недействительный сбой () Инициирует отказ крана. Кран перестает работать. недействительный ремонт () Ремонт крана. Кран снова становится доступным. - Статистика использования
Функция Описание двойной getUtilization() Возвращает использование крана: долю времени, в течение которого кран был занят.  Возвращаемое значение использования крана находится в диапазоне [0..1].
Возвращаемое значение использования крана находится в диапазоне [0..1].недействительный resetStats () Сбрасывает статистику использования крана. - Уровень
Функция Описание Уровень получитьУровень() Возвращает уровень, на котором находится этот кран. - Препятствие
Функция Описание логическое значение isObstacle() Возвращает true, если этот кран считается препятствием для пешеходов и транспортных средств, движущихся в режиме свободного пространства.  В противном случае возвращает ложь.
В противном случае возвращает ложь.void setObstacle (логическое значение isObstacle) Устанавливает этот кран в качестве препятствия для пешеходов и транспортников, движущихся в режиме свободного пространства. isObstacle — если true, кран устанавливается как препятствие. В противном случае нет.
- Механизм
Функция Описание JibCraneMovementMode getMovementMode() Возвращает режим движения тележки, стрелы и крюка крана относительно друг друга. Допустимые значения:
JIB_CRANE_MOVEMENT_STEP_BY_STEP
JIB_CRANE_MOVEMENT_CONCURRENTvoid setMovementMode (MovementMode JibCraneMovementMode) Задает режим движения тележки, стрелы и крюка крана относительно друг друга. 
trafficMode — режим движения компонентов.
Допустимые значения:
JIB_CRANE_MOVEMENT_STEP_BY_STEP
JIB_CRANE_MOVEMENT_CONCURRENTdouble trolleySpeed(Агент агент, юниты SpeedUnits) Возвращает скорость тележки крана, заданную в свойствах крана, в указанных единицах скорости. Агент — материальный объект, перемещаемый краном.
единиц — константа, определяющая единицы скорости.double liftSpeed(Агент агента, юниты SpeedUnits) Возвращает скорость работы подъемной лебедки, заданную в свойствах крана, в указанных единицах скорости. Агент — материальный объект, перемещаемый краном.
единиц — константа, определяющая единицы скорости.двойная скорость вращения (агент агента, единицы измерения RotationSpeedUnits) Возвращает скорость вращения стрелы крана, заданную в свойствах крана, в указанных единицах скорости вращения.  Агент
Агент— материальный объект, перемещаемый краном.
единиц — константа, определяющая единицы скорости вращения.Позиция getCurrentHookPosition() Возвращает текущее положение крюка в пикселях с углом стрелы крана как Position.rotation. Позиция getAbsoluteHookPosition() Возвращает текущую позицию крюка относительно начала координат агента, где находится кран. Положение возвращается в пикселях с углом стрелы крана как Position.rotation. - Размеры и компоненты
Функция Описание double getCraneHeight (единицы измерения длины) Возвращает высоту крана в указанных единицах. 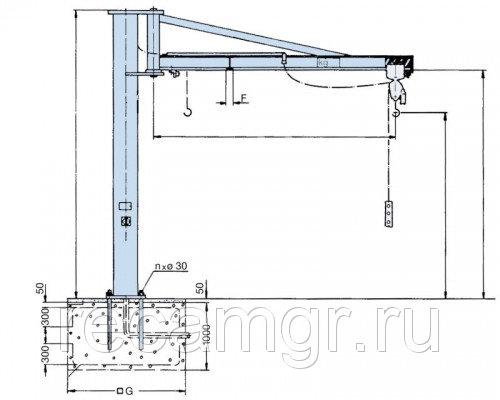
единиц — константа, определяющая единицы длины.
void setCraneHeight (двойная высота, единицы измерения LengthUnits) Устанавливает высоту крана в указанных единицах. height — новое значение высоты.
единиц — константа, определяющая единицы длины.двойной getJibLength() Возвращает длину стрелы крана в пикселях. двойной getJibLength (единицы длины) Возвращает длину стрелы крана в указанных единицах. единиц — константа, определяющая единицы длины.
void setJibLength (двойная длина, единицы измерения LengthUnits) Задает длину стрелы крана в указанных единицах. length — новое значение длины.

единиц — константа, определяющая единицы длины.двойной getInitialJibAngle (единицы измерения углов) Возвращает исходный угол положения стрелы крана. единиц — константа, определяющая единицы измерения угла.
void setInitialJibAngle (двойной угол, единицы AngleUnits) Задает начальный угол положения стрелы крана. angle — новое значение угла.
единицы — константа, определяющая единицы измерения угла.- Заблокированная зона
Функция Описание логическое значение isBlockedZoneEnabled() Возвращает true, если включена заблокированная зона крана, в противном случае возвращает false. 
двойной getBlockedZoneStartAngle() Возвращает угол, где начинается зона блокировки крана. двойной getBlockedZoneAngle() Возвращает дельту угла заблокированной зоны крана. недействительным setBlockedZoneEnabled (логическое значение hasBlockedZone) Включает или отключает заблокированную зону. hasBlockedZone — заблокированная зона. Если этот параметр имеет значение true, заблокированная зона включена. Если false, заблокированная зона отключена.
void setBlockedZoneStartAngle (двойной угол, единицы AngleUnits) Устанавливает угол, под которым начинается зона блокировки крана. angle — новое значение угла.
единицы — константа, определяющая единицы измерения угла.
void setBlockedZoneAngle (двойной угол, единицы измерения AngleUnits) Устанавливает дельта-угол зоны блокировки крана. angle — новое значение угла.
единицы — константа, определяющая единицы измерения угла.void setBlockedZone (двойной startAngle, двойной deltaAngle, единицы измерения AngleUnits) Включает заблокированную зону с заданными параметрами. startAngle — значение начального угла заблокированной зоны.
deltaAngle — дельта-угол значения заблокированной зоны.
единиц — константа, определяющая единицы измерения угла.- Кран типа
Функция Описание JibCraneType getType() Возвращает тип внешнего вида крана. 
Допустимые значения:
JIB_CRANE_INDUSTRIAL
JIB_CRANE_CAT_HEAD
JIB_CRANE_FLAT_TOPvoid setType (тип JibCraneType) Устанавливает тип внешнего вида крана. Тип — новый тип внешнего вида крана.
Допустимые значения:
JIB_CRANE_INDUSTRIAL
JIB_CRANE_CAT_HEAD
JIB_CRANE_FLAT_TOP- Цвет
Функция Описание Цвет получитьЦвет() Возвращает цвет крана или ноль, если кран не имеет цвета. void setColor (Цвет цвета) Устанавливает цвет крана. – новый цвет/
Цвет getTrolleyColor() Возвращает цвет кабины крана или ноль, если кабина крана не имеет цвета. 
void setTrolleyColor (Цвет тележки) Задает цвет кабины крана. cabColor — новый цвет.
- Видимость
Функция Описание логическое значение является видимым () Возвращает true, если кран виден; в противном случае возвращает false. недействительным setVisible (логическое v) Устанавливает видимость крана. v — видимость. Если v равно true — кран будет виден, если false — не будет виден.
- Позиция
Функция Описание двойной получитьX() Возвращает координату X центральной точки крана. 

