

Содержание
1.17. Балансировка вращающихся деталей и узлов
1.17.1. Виды неуравновешенности
Балансировка
представляет собой устранение не
уравновешивающих друг друга сил инерции
в деталях машин и узлах.
К
основным причинам, вызывающие
неуравновешенность вращающихся деталей
относятся:
неточность
изготовления деталей;
неравномерность
распределения материала детали
относительно оси вращения;
образование
различных структур в детали при
термообработке;
неравномерное
изнашивание детали в процессе эксплуатации;
пластическая
деформация детали;
неточная
сборка узла, в результате которой
образуется неравномерное распределение
массы деталей;
смещение
детали в сборочном узле при эксплуатации;
неравномерная
нагрузка, приводящая к изгибу детали.
Различают
следующие виды неуравновешенности
деталей и узлов (рис. 46):
46):
1.
Статическая неуравновешенность;
2.
Динамическая неуравновешенность;
3. Общая
неуравновешенность.
Рис.
46. Виды
неуравновешенности: а
– статическая
неуравновешенность;
б
–
динамическая неуравновешенность; в
–
общая неуравновешенность
Статическая
неуравновешенность образуется в том
случае, когда неуравновешенные массы
тела приводятся к одной массе и одной
центробежной силе, вызываемой этой
массой при вращении тела. Статическая
неуравновешенность наблюдается в
деталях большого диаметра и малой длины
(шкивы, маховики и др.) (рис. 46, а ).
Ее
можно обнаружить взвешиванием на
специальных весах либо на призмах, не
приводя деталь во вращение.
Приведенная
центробежная сила при статической
неуравновешенности определяется по
следующему выражению:
(3),
где m
– приведенная неуравновешенная масса,
кг; ω – угловая скорость вращения тела,
с-1;
ρ – расстояние от оси вращения до центра
тяжести неуравновешенной массы, м.
Динамическая
неуравновешенность получается, если в
детали образуются две равные и прямо
противоположные центробежные силы,
лежащие в одной плоскости. Каждая
центробежная сила определяется при
этом по формуле (3), момент от двух сил
определяется по формуле (рис. 46,б)
,
где а
– расстояние между силами, м.
Динамическая
неуравновешенность встречается в
деталях большой длины: коленчатых валах,
роторах электрических машин, центробежных
насосах, в валах редукторов.
Общая
неуравновешенность возникает, если во
вращающейся детали появляются две
взаимно противоположные и равные
центробежные силы (S-S) и приведенные
центробежные силы (Р-Т, рис. 46, в). Каждая
из сил определяется соответствующим
уравнением:
,
.
Неуравновешенность
повышает нагрузку на подшипники, и,
следовательно, их износ изгибает валы,
вызывает колебания и вибрацию машины.
При балансировке важно определить
величину сил, создающих неуравновешенность
и их направление.
1.17.2. Статическая балансировка вращающихся изделий Цель и задачи статической балансировки
Как известно,
основной недостаток статической
балансировки, заключающийся в невозможности
обнаружить моментную неуравновешенность
роторов, устранить нельзя. Поэтому
область применения в технике статической
балансировки роторов ограничена. В
настоящее время статическая балансировка
используется для уравновешивания
роторов дискообразной формы, некоторых
узлов, вращающихся с малыми скоростями,
а также в том случае, когда единственной
целью уравновешивания является приведения
центра массы детали на ось вращения.
Целью статической
балансировки является устранение
неуравновешенности вращающейся детали.
Задачей статической балансировки
является приведение центра масс изделия
на ось вращения путем изменения
распределения массы.
Наука о балансировке
вращающихся изделий объемна и разнообразна.
Особое внимание при монтаже машин
уделяется балансировке роторов, валов
и колес различного назначения. Существуют
способы статической балансировки,
динамической балансировки роторов на
станках и в собственных подшипниках.
Балансируют самые различные роторы –
от гироскопов
и шлифовальных кругов до роторов турбин
и судовых коленчатых валов. Создано
множество приспособлений, станков и
приборов с применением новейших
разработок в области приборостроения
и электроники для балансировки разных
агрегатов.
Для рабочих колес
применима статическая балансировка,
т. к. при превышении диаметром колеса
его ширины более чем в пять раз остальные
составляющие (моментная и динамическая)
малы и ими можно пренебречь.
Чтобы сбалансировать
колесо, нужно –
решить три задачи:
1) найти то самое
«нужное место»
–
направление, на котором расположен
центр тяжести;
2) определить,
сколько «заветных грамм» противовеса
необходимо и на каком радиусе их
расположить;
3) уравновесить
дисбаланс корректировкой массы рабочего
колеса.
Сущность
статической балансировки заключается
в определении без вращения наиболее
легкой и тяжелой частей детали. Делая
легкой тяжелую часть или тяжелой легкую
добиваются балансировки детали.
Статическую балансировку выполняют на
призмах либо на роликах, либо на весах.
Балансировка
на призмах проводится явно выраженной
неуравновешенности, когда неуравновешенная
масса создает неуравновешенную силу,
преодолевающую трение качения, и скрытой
неуравновешенности, когда неуравновешенная
сила недостаточна для преодоления
трения качения.
Деталь
с явно выраженной неуравновешенностью
помещают на призмы таким образом, чтобы
неуравновешенная масса G находилась в
горизонтальной плоскости, проходящей
через ось диска (рис. 47, а). Диаметрально
противоположно G помещают такой груз
Q, при котором наступает равновесие.
Проверку равновесия производят обычно
в 4 положениях детали (А, Б, С, Д).
Уравновешивающий груз взвешивают и
добавляют на диск либо убирают с
противоположной стороны (если это
возможно) сверлением, точением,
анодно-механической обработкой.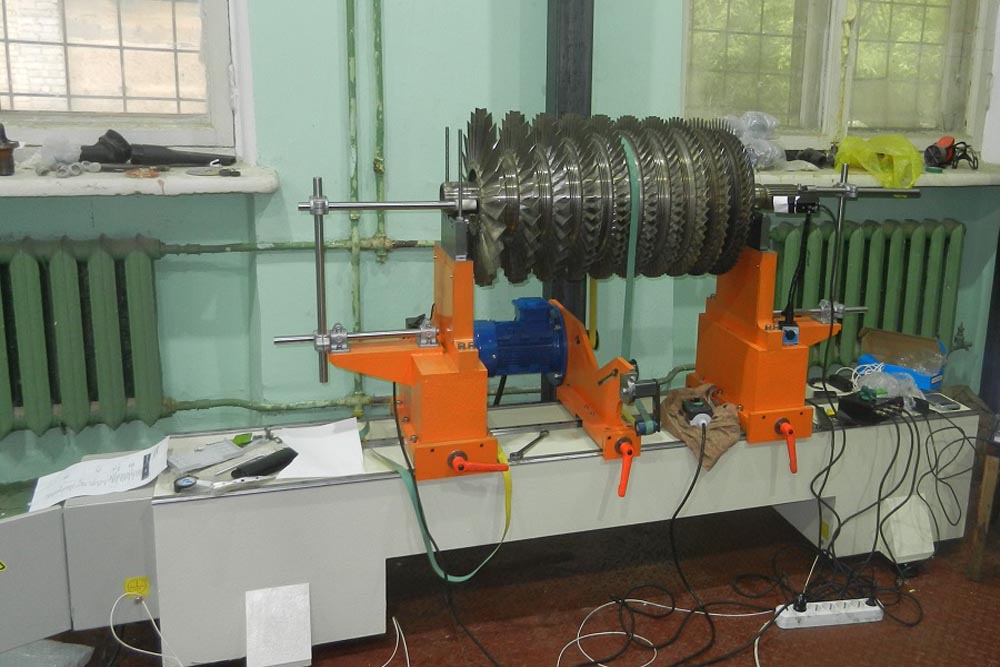
Балансировка деталей и узлов — Ремонт дорожных машин, автомобилей и тракторов (Инженерия)
§ 14. Балансировка деталей и узлов
При вращении с большой скоростью неуравновешенных деталей и узлов возникают дополнительные нагрузки, действующие; как на эти детали и узлы, так и на их опоры. К деталям и узлам, требующим балансировки, относятся: коленчатый вал, шкив коленчатого вала, шкив вала водяного насоса, лопасти вентилятора, шкив компрессора, коленчатый вал в сборе с маховиком и сцеплением, карданный вал в сборе, колесо с шиной в сборе и др. Балансировка (уравновешивание) таких деталей и узлов является одним из условий повышения надежности и долговечности автомобилей. При ремонте автомобилей балансировка деталей и узлов может быть нарушена, поэтому их необходимо проверять и в случае необходимости вновь подвергать балансировке.
Равновесие деталей и узлов может быть статическим и динамическим.
При статическом равновесии центр тяжести находится на оси вращения детали или узла. При динамическом равновесии необходимо, чтобы центр тяжести детали или узла также находился на оси вращения и при этом отсутствовали какие-либо моменты центробежных сил, действующих в плоскости, проходящей через ось вращения.
При динамическом равновесии необходимо, чтобы центр тяжести детали или узла также находился на оси вращения и при этом отсутствовали какие-либо моменты центробежных сил, действующих в плоскости, проходящей через ось вращения.
Статическая балансировка. В качестве примера рассмотрим балансировку детали, установленной на валу (или на специальной оправке), опирающемся на горизонтальные направляющие 3. Под действием неуравновешенной массы т эта деталь самопроизвольно повернется и займет положение, при котором неуравновешенная масса будет находиться в крайнем нижнем положении .
При вращении детали возникает неуравновешенная центробежная сила, которая, как было отмечено выше, создает дополнительную нагрузку на вал и на его опоры.
Для уравновешивания детали к ней нужно прикрепить уравновешивающий груз, расположив его с диаметрально противоположной стороны по отношению к неуравновешенной массе. При этом моменты сил тяжести неуравновешенной массы и уравновешивающего груза относительно оси вращения детали должны быть равны. Этим обеспечивается равновесие детали.
Этим обеспечивается равновесие детали.
Равновесие может быть достигнуто также путем удаления части металла детали со стороны неуравновешенной массы (спиливанием или высверливанием).
Статической балансировке подвергают обычно плоские детали и подгруппы — например маховики, ведомые диски сцепления, вентиляторы, а также некоторые узлы — ступицы колес в сборе с тормозными барабанами, нажимной диск сцепления в сборе с кожухом.
Статическую балансировку производят с помощью приспособлений, устанавливая детали на горизонтальных призматических параллелях или на попарно установленных вращающихся дисковых роликах. Дисковые ролики в таких приспособлениях установлены на шариковых подшипниках, что сводит до минимума сопротивление вращению. Поэтому роликовые приспособления дают большую точность балансировки.
При балансировке очень трудно устранить дисбаланс полностью, поэтому техническими условиями предусматривается допустимый дисбаланс для той или иной детали.
Динамическая балансировка. При вращении вала возникают две противоположно направленные центробежные силы. Эти силы находящиеся друг от друга на расстоянии, создают момент, который вызывает динамическое неравновесие вала. В результате вал и его опоры будут испытывать дополнительную нагрузку.
При вращении вала возникают две противоположно направленные центробежные силы. Эти силы находящиеся друг от друга на расстоянии, создают момент, который вызывает динамическое неравновесие вала. В результате вал и его опоры будут испытывать дополнительную нагрузку.
Момент этой пары сил может быть уравновешен другой парой сил, приложенной к валу, действующей в той же плоскости и создающей равный противодействующий момент. Таким образом, динамическое неравновесие может быть устранено только уравновешивающей его парой сил.
18 Боливийская революция — лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
Для динамического уравновешивания детали к ней, в плоскости. действия момента необходимо приложить две массы m1=mа на равном расстоянии от оси вращения, в результате чего при вращении вала возникнут центробежные силы Р1 и Р2, которые создадут момент пары сил Р1L, противодействующей моменту F1L и уравновешивающий его.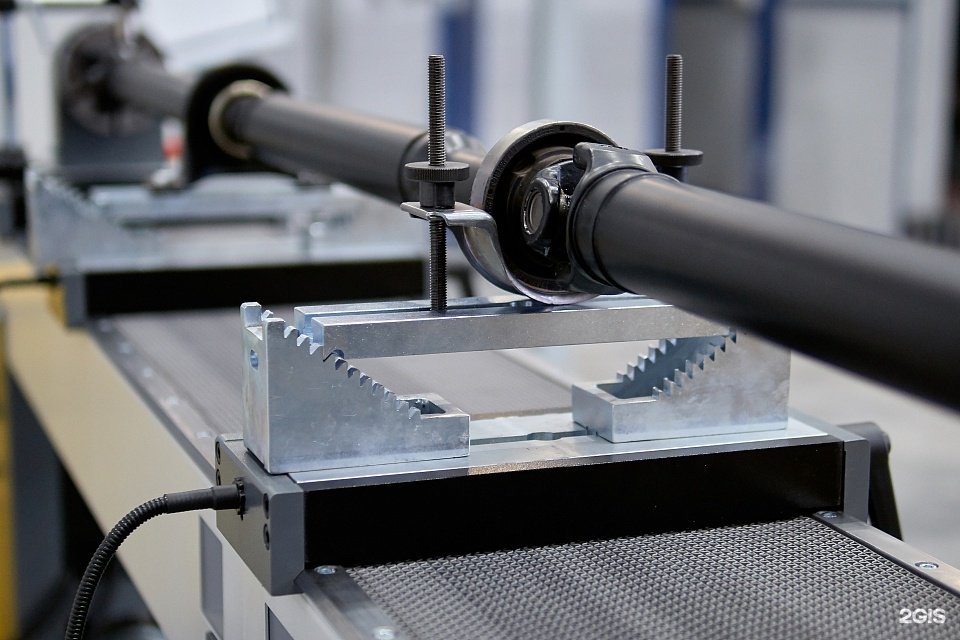 Такие уравновешивание называется динамической балансировкой.
Такие уравновешивание называется динамической балансировкой.
Динамическую балансировку деталей и узлов производят на специальных балансировочных станках, в основу их работы положен метод разделений суммарного дисбаланса балансируемого узла для корректирования его в двух заданных плоскостях. В случае динамической неуравновешенности узла опоры будут колебаться; вместе с ними будут колебаться и катушки в магнитных полях постоянных магнитов и в их обмотках появится ЭДС.
Величина этих ЭДС будет пропорциональна амплитуде колебаний катушек. Напряжение электрического тока в цепи катушек усиливается трансформатором-усилителем и замеряется с помощью прибора , имеющего шкалу, градуированную в единицах дисбаланса. Одновременно с вращением балансируемого узла вращается ротор генератора. Статор этого генератора может поворачиваться и, вследствие особого расположения в нем катушек, изменять при этом показания прибора .
Балансировочный станок имеет две параллельные электрические схемы, что позволяет при включении с помощью переключателя 14 каждой схемы в отдельности определять неуравновешенность в двух плоскостях — I—I и II—II.
Плоскости, в которых необходимо производить корректирование, устанавливаются заранее и зависят от конструкции балансируемого узла. В этих плоскостях для устранения дисбаланса узла производят снятие металла (высверливанием), установку шайб или приварку специальных металлических пластинок. Место установки шайб и приварки пластинок или место, где можно удалить металл, указывается в, технических условиях на балансировку того или иного узла. Таким образом добиваются, чтобы дисбаланс узла находился в пределах допусков, установленных техническими условиями. Электрические балансировочные станки дают возможность производить балансировку деталей и узлов с большой точностью.
На ремонтных предприятиях балансировке подвергают некоторые узлы, так как в результате замены отдельных деталей она может быть нарушена. Кроме того, необходимо балансировать коленчатые валы двигателей после восстановления их шеек наплавкой. Точность балансировки зависит от конструкции и назначения узлов и деталей, скорости их вращения и допустимой вибрации при работе/
Что такое балансировка? | Universal Balancing
Этот веб-сайт использует файлы cookie, чтобы обеспечить вам максимальное удобство на нашем веб-сайте.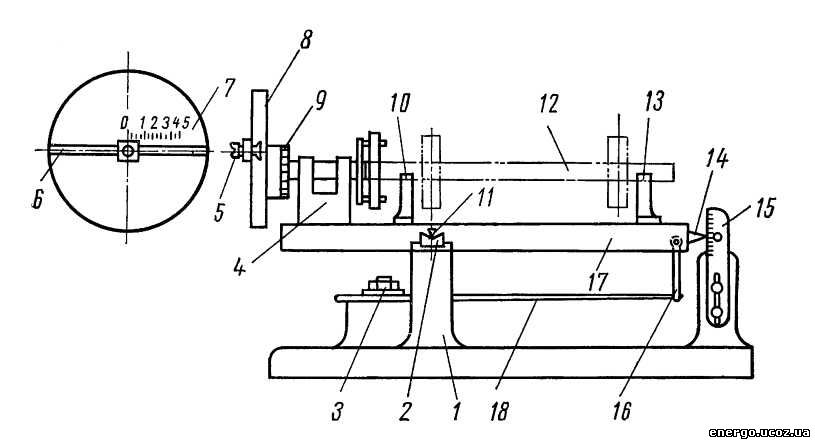 Вы можете управлять своими предпочтениями, просмотрев наше Уведомление об использовании файлов cookie.
Вы можете управлять своими предпочтениями, просмотрев наше Уведомление об использовании файлов cookie.
Принять и продолжить
Для обычного человека балансировка ротора часто является «черной магией». Знания большинства людей о балансировке ограничены автомобильными колесами и шинами, которые необходимо отбалансировать перед установкой на автомобили; в противном случае они столкнутся с дрожанием руля, неравномерным износом шин и так далее. Мы поможем вам проникнуть в мир балансировки и помочь избавиться от «черной магии».
НУЖНА ПОМОЩЬ?
Несбалансированный ротор
В роторе возникает дисбаланс, когда ось центра масс отличается от оси его рабочего центра. Практически все вновь обрабатываемые детали несимметричны из-за газовых отверстий в отливках, неравномерного количества и расположения отверстий под болты, деталей, установленных не по центру, диаметров обрабатываемых деталей не отцентрованы от мест расположения подшипников и т.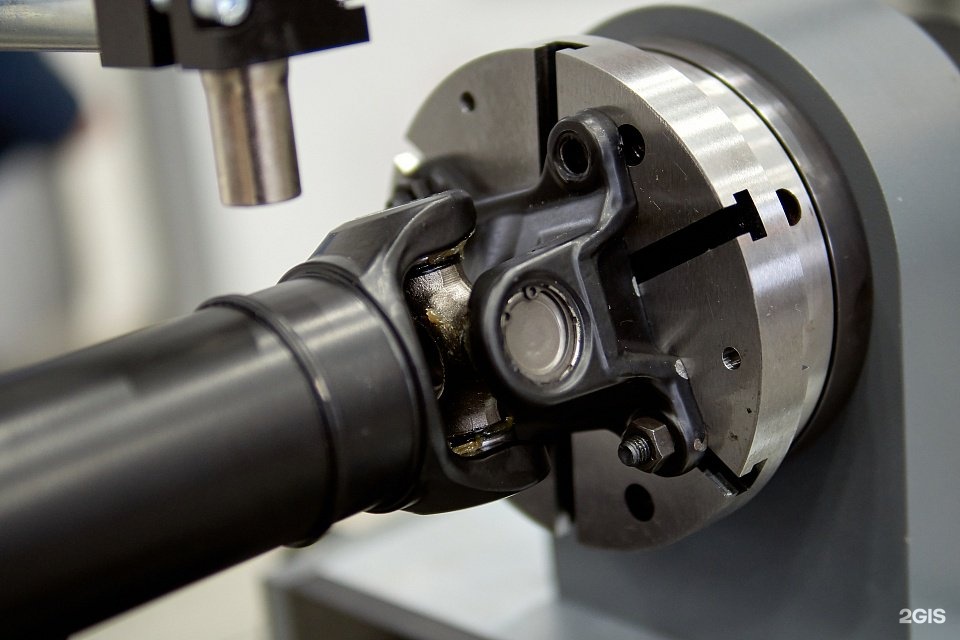 д.
д.
Неуравновешенный ротор при вращении хочет вращаться вокруг своей оси центра масс. Поскольку подшипники ограничивают это движение, центробежная сила из-за дисбаланса вызывает вибрацию ротора. Эта вибрация вызывает износ подшипников, создает ненужный шум, а в крайних случаях может произойти разрушение самого ротора. Поэтому необходимо уменьшить дисбаланс до приемлемого предела.
Пределы балансировки
Существуют пределы балансировки, как и пределы обработки, где дисбаланс допустим. Для роторов указаны международные и национальные стандарты, например:. автомобильные колеса балансируются до предела 40 баллов, а малая электрическая арматура балансируется до класса 2,5. Оценки преобразуются в единицы дисбаланса в зависимости от скорости вращения ротора в соответствии со стандартами ISO 1940.
Воспользуйтесь нашим калькулятором балансировки: калькулятор допусков
Единицы дисбаланса
Единицы дисбаланса — это масса, умноженная на радиус, например: добавление веса в определенное положение на балансируемой детали сместит ось массы на ось вращения и, следовательно, будет в равновесии.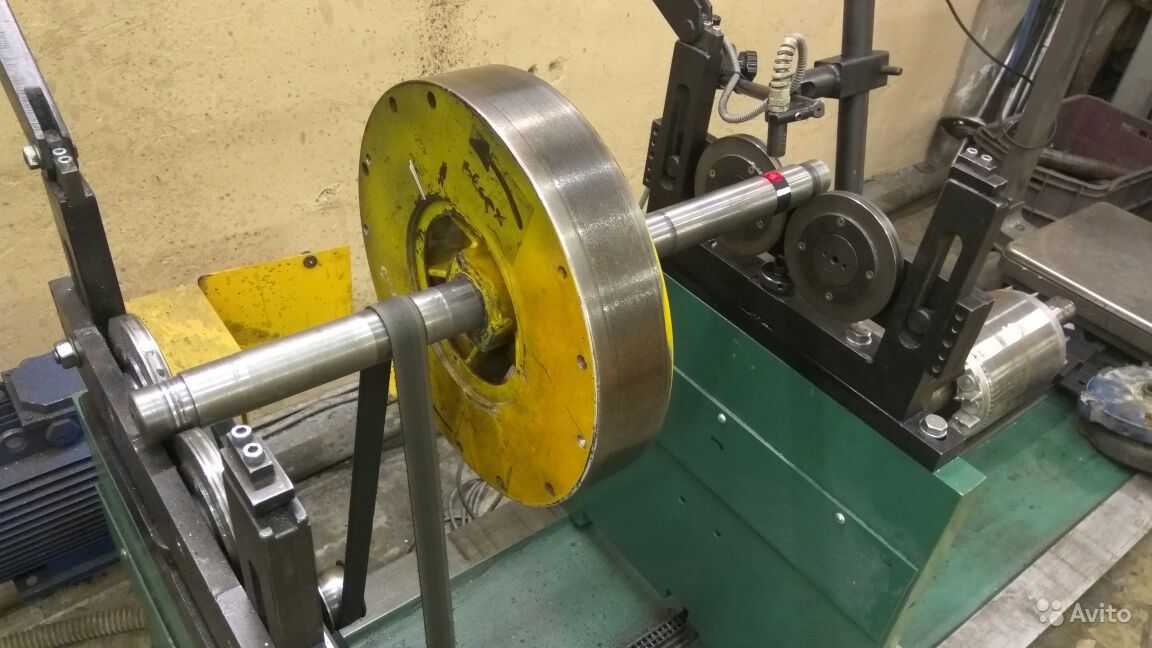 Вес исправления, умноженный на примененный радиус, даст единицу дисбаланса. Для метрических измерений единицами будут грамм-миллиметры (гмм), а для больших роторов — грамм-сантиметры. Британский эквивалент будет грамм-дюйм или унция-дюйм. Этот вес (масса) будет применяться в радиусе от бегущего центра в светлом положении.
Вес исправления, умноженный на примененный радиус, даст единицу дисбаланса. Для метрических измерений единицами будут грамм-миллиметры (гмм), а для больших роторов — грамм-сантиметры. Британский эквивалент будет грамм-дюйм или унция-дюйм. Этот вес (масса) будет применяться в радиусе от бегущего центра в светлом положении.
Типы роторов
Роторы делятся на две группы. Во-первых, ротор жесткий и не прогибается вплоть до рабочей скорости включительно.
Другая группа включает гибкие роторы, которые «изгибаются» до рабочей скорости. Первое наблюдаемое отклонение — это «эффект скакалки», который означает, что центр ротора на скорости смещается от его оси вращения, вызывая высокий «статический» дисбаланс.
Типы дисбаланса
Существует три типа дисбаланса:
- Статический дисбаланс – это когда ось массы смещена только параллельно оси вала. Дисбаланс исправляется только в одной осевой плоскости.
- Дисбаланс пары – это место, где ось масс пересекает ось вращения.
 Например: диск с наклонным биением без статического дисбаланса. Дисбаланс обычно исправляется в двух плоскостях
Например: диск с наклонным биением без статического дисбаланса. Дисбаланс обычно исправляется в двух плоскостях - Динамический дисбаланс – ось масс не совпадает с осью вращения. Этот дисбаланс обычно является комбинацией статического и парного дисбаланса и корректируется в двух плоскостях
Методы исправления дисбаланса
Удаление материала путем сверления, фрезерования и т. д. из тяжелого места на компоненте используется для устранения дисбаланса. В качестве альтернативы это можно исправить, добавив материал в «легкое» положение на компоненте, прикрутив болтами или приварив балансировочные грузы, чтобы уменьшить дисбаланс.
Балансировочные станки
Для определения положения и величины дисбаланса производители роторов используют балансировочные станки для исправления любого существующего дисбаланса. Эти машины настолько чувствительны, что могут легко и точно идентифицировать любую ось массы на 0,001 мм от оси движения.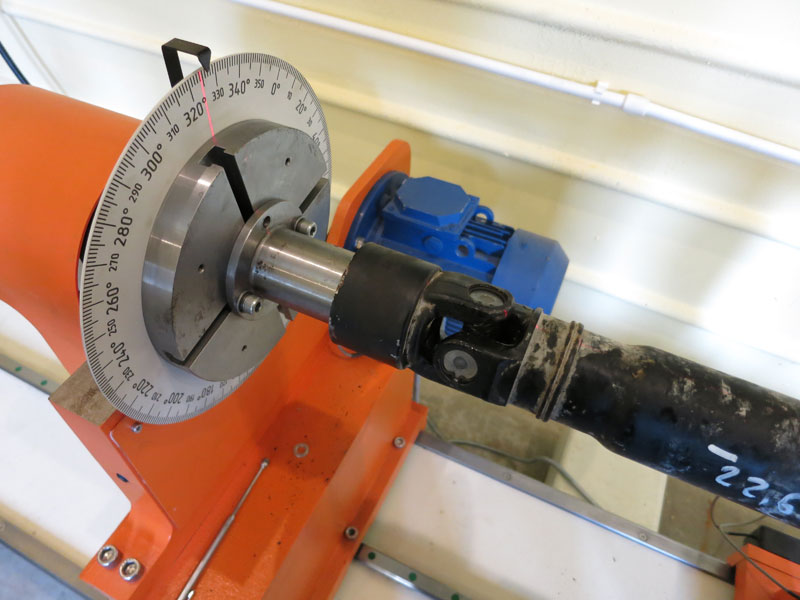
Один тип машины идентифицирует только статический дисбаланс. Это используется для балансировки деталей в форме диска. Другой тип машины выявит дисбаланс в двух осевых плоскостях, например. для балансировки роторов, длина которых пропорционально больше диаметра. Эти машины доступны в версиях, которые уравновешивают ротор по горизонтальной или вертикальной оси.
Благодаря использованию современной электроники точность легко превышает национальные и международные стандарты. Настройка машины очень проста, достаточно ввести измерения в компьютер.
Балансировка жестких роторов
Поскольку дисбаланс присутствует в компоненте даже в стационарном состоянии, жесткие роторы можно балансировать на низкой скорости, достаточной для создания центробежной силы, регистрирующей дисбаланс.
Балансировка гибких роторов
Этот тип ротора балансируется на низкой скорости, когда ротор не изгибается. Производится коррекция дисбаланса, затем скорость постепенно увеличивается, и дисбаланс корректируется поэтапно до тех пор, пока не будет достигнута рабочая скорость ротора.
Modern Techniques
Учитывая высокую стоимость замены поврежденных роторов, авиационная отрасль требует, чтобы заменяемые части или секции роторов сохраняли приемлемый баланс. Этот метод включает использование фиктивных смежных деталей, например, балансировку модуля компрессора с фиктивным модулем турбины и замену лопаток компрессора и турбины без дальнейшей балансировки. Эти методы доступны для широкой промышленности, если они потребуются клиентам.
Резюме
Новейшие методы производства уменьшают или устраняют необходимость балансировки в низкоскоростных устройствах, но с постоянно увеличивающимися скоростями, используемыми на вращающихся машинах, динамическая балансировка будет необходима в обозримом будущем. Понимание динамической балансировки упрощает весь производственный процесс.
Посмотреть балансировочные станки
Нужна помощь?
Мы будем рады помочь вам с вашей специальной заявкой, введите свои данные ниже, и специалист по балансировке свяжется с вами – никаких обязательств.
Reliabilityweb Понимание основ балансировки и методов измерения
ОСНОВНЫЕ ТЕРМИНЫ
ЦЕНТР ТЯЖЕСТИ (ЦТ):
По этой причине термин центр тяжести можно рассматривать как то же самое, что и центр масс. Их выравнивание будет отличаться только в больших телах, где гравитационное притяжение Земли не одинаково для всех компонентов тела. Тот факт, что эти точки одинаковы для большинства тел, является причиной того, что статические (невращающиеся) балансиры, которые могут измерять только центр тяжести, могут использоваться для определения местоположения центра масс. Дополнительная информация о статических балансировщиках будет рассмотрена на следующих страницах.
ЦЕНТР МАССЫ:
Центр масс — это точка тела, в которой, если бы вся масса была сосредоточена в одной точке, тело действовало бы одинаково при любом направлении линейного ускорения. Если через эту точку проходит вектор силы, то тело будет двигаться прямолинейно, без вращения. Второй закон Ньютона описывает это движение как F = ma. Если сумма сил F, действующих на тело, равна его массе m, умноженной на его ускорение а.
Второй закон Ньютона описывает это движение как F = ma. Если сумма сил F, действующих на тело, равна его массе m, умноженной на его ускорение а.
ГЕОМЕТРИЧЕСКАЯ ОСЬ:
Геометрическая ось также называется осью вала или инженерной осью вращения. Эта ось вращения определяется либо опорной поверхностью вращения, имеющейся на заготовке, либо установочной поверхностью. Подходящая монтажная поверхность устанавливает центр вращения в плоскости центра масс (плоскость, в которой расположен центр масс).
ГЛАВНАЯ ОСИ ИНЕРЦИИ:
Когда деталь не имеет форму диска и имеет длину вдоль оси вращения, она вращается в свободном пространстве вокруг линии. Эта линия называется главной осью инерции. Центр масс является точкой на этой прямой. Требуется энергия, чтобы поколебать часть и заставить ее колебаться или вращаться вокруг другой оси инерции. Примерами этого могут быть правильно брошенный футбольный мяч или пуля, выпущенная из винтовки. Когда главная ось инерции совпадает с осью вращения, деталь будет вращаться без дисбалансных сил. В этом случае как статический, так и парный дисбаланс равны нулю.
Когда главная ось инерции совпадает с осью вращения, деталь будет вращаться без дисбалансных сил. В этом случае как статический, так и парный дисбаланс равны нулю.
Таким образом, состояние равновесия — это физическое состояние, которое прекращается при наличии равномерного распределения общей массы. Статическое равновесие существует, когда центр масс находится на оси вращения. Принимая во внимание, что как статический, так и парный баланс существуют, когда главная ось инерции совпадает с осью вращения.
ВИДЫ ДИСБАЛАНСИРОВКИ
Расположение центра масс и главной оси инерции определяется встречным уравновешивающим действием каждого элемента детали. Однако любое состояние дисбаланса можно исправить, применяя или удаляя вес на определенном радиусе и под определенным углом. На самом деле величину дисбаланса U можно правильно определить как вес w на радиусе r.
Статический дисбаланс также можно определить, если известен вес детали и смещение центра масс от геометрической оси. В этом случае U равно весу w заготовки, умноженному на смещение e.
В этом случае U равно весу w заготовки, умноженному на смещение e.
СТАТИЧЕСКИЙ ДИСБАЛАНС:
Состояние, при котором центр масс не находится на оси вращения. Это также можно объяснить как условие, когда главная ось инерции параллельна оси вращения. Статический дисбаланс сам по себе обычно измеряется и корректируется на узких дискообразных деталях, таких как фрисби. Для коррекции статического дисбаланса требуется только одна коррекция. Величина дисбаланса является произведением веса и радиуса. Этот тип дисбаланса является векторным и, следовательно, должен быть скорректирован известным весом под определенным углом. Силовой дисбаланс — это другое название статического дисбаланса.
Как обсуждалось ранее, заготовка находится в статическом равновесии, когда центр масс находится на оси вращения. При наличии этого условия деталь может вращаться вокруг этой оси, не создавая силы инерции на центр масс. Детали, предназначенные для статических применений, такие как стрелки спидометра или движения аналоговых измерителей, выигрывают от статического равновесия, поскольку сила тяжести не создает момент, больший под одним углом, чем под другим, что делает их нелинейными. На следующем рисунке показан пример статического дисбаланса.
На следующем рисунке показан пример статического дисбаланса.
РАЗБАЛАНСИРОВКА ПАР:
Это особое состояние, когда главная ось инерции не параллельна оси вращения. Чтобы устранить дисбаланс пары, к заготовке необходимо добавить два одинаковых груза под углом 180° друг к другу в двух плоскостях коррекции. Расстояние между этими плоскостями называется плечом пары. Дисбаланс пар представляет собой вектор, описывающий коррекцию. Балансиры обычно отображают левый вектор дисбаланса парной коррекции, которая применяется как в левой, так и в правой плоскостях.
Дисбаланс пары выражается как U = wrd, где величина дисбаланса U является произведением веса w на радиус r и на расстояние d плеча пары. Дисбаланс пары определяется как произведение массы на квадрат длины. Обычными единицами измерения дисбаланса пары являются г-мм2 или унция-дюйм2. Угол – это угол коррекции в левой плоскости. (Обратите внимание: в механике угол перпендикулярен плоскости радиус-вектора и вектора плеча пары. Это угол 900 от положения груза.) Дисбаланс пары можно скорректировать в любых двух плоскостях, но сначала необходимо определить величину разделить на расстояние между выбранными плоскостями. В то время как статический дисбаланс можно измерить с помощью невращательного балансира, парный дисбаланс можно измерить только путем вращения заготовки.
Это угол 900 от положения груза.) Дисбаланс пары можно скорректировать в любых двух плоскостях, но сначала необходимо определить величину разделить на расстояние между выбранными плоскостями. В то время как статический дисбаланс можно измерить с помощью невращательного балансира, парный дисбаланс можно измерить только путем вращения заготовки.
Сочетание силы и парного дисбаланса полностью определяет весь дисбаланс, существующий в детали. Для определения дисбаланса таким образом требуются три отдельных корректирующих груза. На следующем рисунке показан пример неуравновешенности пары.
ДВУХПЛОСКИЙ ДИСБАЛАНС:
Также называется динамическим дисбалансом. Это векторное суммирование силы и неуравновешенности пары. Для коррекции дисбаланса в двух плоскостях требуются два несвязанных корректирующих груза в двух разных плоскостях под двумя не связанными углами. Спецификация дисбаланса является полной только в том случае, если известно осевое расположение плоскостей коррекции.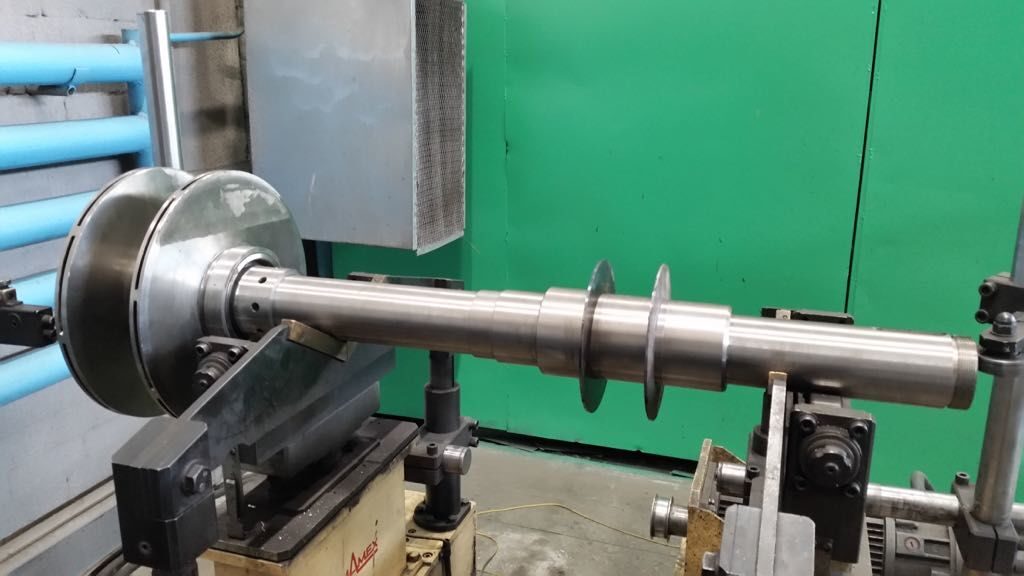 Динамический дисбаланс или дисбаланс в двух плоскостях определяет весь дисбаланс, который существует в заготовке. Этот тип дисбаланса можно измерить только на вращающемся балансире, который воспринимает центробежную силу из-за парного компонента дисбаланса.
Динамический дисбаланс или дисбаланс в двух плоскостях определяет весь дисбаланс, который существует в заготовке. Этот тип дисбаланса можно измерить только на вращающемся балансире, который воспринимает центробежную силу из-за парного компонента дисбаланса.
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА:
Термин, обозначающий балансир, который вращается и измеряет центробежную силу. Этот тип балансира необходимо использовать при измерении дисбаланса пары или двух плоскостей. Как правило, его также можно использовать для повышения чувствительности при измерении статического или силового дисбаланса. На следующем рисунке показан пример динамического дисбаланса.
ЕДИНИЦЫ ДИСБАЛАНСИРОВКИ
Дисбаланс может быть указан как вес массы, добавляемой или удаляемой на радиусе коррекции. Единицами веса могут быть любые удобные единицы измерения, которые учитывают доступное оборудование для взвешивания и размер всей единицы измерения. Граммы (г), унции (oz) и килограммы (кг) являются наиболее распространенными единицами измерения. Иногда указываются ньютоны (Н), но для практического использования их необходимо преобразовать в доступные единицы измерения веса. Единицы длины обычно соответствуют стандартным единицам длины чертежа производителя. Чаще всего это дюймы (дюймы), миллиметры (мм), сантиметры (см) и метры (м). Наиболее распространенными комбинациями, используемыми для указания дисбаланса, являются унции-дюймы (oz-in), граммы-дюймы (g-in), граммы-миллиметры (g-mm), грамм-сантиметры (g-cm) и килограмм-метры ( кг-м).
Иногда указываются ньютоны (Н), но для практического использования их необходимо преобразовать в доступные единицы измерения веса. Единицы длины обычно соответствуют стандартным единицам длины чертежа производителя. Чаще всего это дюймы (дюймы), миллиметры (мм), сантиметры (см) и метры (м). Наиболее распространенными комбинациями, используемыми для указания дисбаланса, являются унции-дюймы (oz-in), граммы-дюймы (g-in), граммы-миллиметры (g-mm), грамм-сантиметры (g-cm) и килограмм-метры ( кг-м).
ДВИЖЕНИЕ НЕСБАЛАНСИРОВАННЫХ ЧАСТЕЙ
Как влияет дисбаланс на вращающуюся деталь? С одной стороны, при установке на жесткой подвеске на опорные подшипники или монтажную поверхность должна воздействовать разрушающая сила, ограничивающая деталь. Если крепление гибкое, деталь и крепление будут испытывать значительные вибрации. В обычном приложении есть комбинация обоих.
Рассмотрим неуравновешенный тонкий диск, установленный на простой пружинной подвеске. Пружина будет реагировать по-разному в зависимости от скорости вращения диска. При очень низких скоростях (менее половины резонансной частоты пружинной массы) дисбаланс диска создает очень небольшую центробежную силу, вызывая небольшое отклонение пружины и небольшое движение массы.
При очень низких скоростях (менее половины резонансной частоты пружинной массы) дисбаланс диска создает очень небольшую центробежную силу, вызывая небольшое отклонение пружины и небольшое движение массы.
У твердых тел дисбаланс остается прежним, хотя увеличение скорости приводит к увеличению силы и движения. Сила возрастает экспоненциально пропорционально квадрату изменения скорости. Удвоенная скорость равняется четырехкратному увеличению силы и четырехкратному движению. Другими словами, сила пропорциональна квадрату скорости вращения. Уравнение для оценки силы:
Центробежная сила, вызванная дисбалансом в 0,001 унции дюйма при различных скоростях.
Центробежная сила дисбаланса направлена наружу от центра детали, в месте расположения груза. В балансире с жесткой подвеской сила изгибает жесткую пружину, вызывая возникновение высокой точки вибрации в месте расположения груза.
При скоростях, в два раза превышающих резонансную частоту пружины-массы, сила дисбаланса намного превышает силу пружины. Движение неуравновешенной части ограничено собственной инерцией. Деталь вращается вокруг текущего центра масс при любой рабочей скорости в этом диапазоне. Пик смещения равен эксцентриситету центра масс e, поэтому Xp = e. Формула для пикового смещения, Xp, равна дисбалансу, U, деленному на вес детали. (Примечание: единицы веса дисбаланса должны быть такими же, как единицы веса части.) В балансире это называется мягкой подвеской.
Движение неуравновешенной части ограничено собственной инерцией. Деталь вращается вокруг текущего центра масс при любой рабочей скорости в этом диапазоне. Пик смещения равен эксцентриситету центра масс e, поэтому Xp = e. Формула для пикового смещения, Xp, равна дисбалансу, U, деленному на вес детали. (Примечание: единицы веса дисбаланса должны быть такими же, как единицы веса части.) В балансире это называется мягкой подвеской.
При оставшихся скоростях вблизи резонансной частоты амплитуда движения может стать намного больше, чем при более высоких скоростях, даже если сила дисбаланса меньше. Резонанс существует, когда сила сопротивления инерции детали равна и противоположна силе сопротивления пружины. Единственная сила сопротивления обусловлена механическим демпфированием. Когда демпфирование низкое, амплитуда вибрации может быть в пятьдесят раз больше при резонансе. В прошлом некоторые балансировочные компании запускали свои балансировщики на этой скорости, чтобы повысить чувствительность. Однако, благодаря значительному совершенствованию современной электроники, этот диапазон скоростей считается непредсказуемым, и поэтому его обычно избегают.
Однако, благодаря значительному совершенствованию современной электроники, этот диапазон скоростей считается непредсказуемым, и поэтому его обычно избегают.
Деталь, отличная от тонкого диска, имеющая длину вдоль оси вращения, имеет аналогичную реакцию при вращении, поддерживаемую системой подвески на каждом конце. При скоростях ниже резонанса (в жесткой подвеске) сила, создаваемая центробежной силой, распределяется между двумя точками подвеса точно так же, как простая статическая нагрузка делится между двумя точками опоры. При скоростях выше резонансных (в мягком подвесе) деталь вращается не только вокруг центра масс, но и вокруг главной оси инерции. Пиковое смещение в любой точке детали равно расстоянию между главной осью инерции и геометрической осью. Следует отметить, что их может быть 9.0107 несколько резонансных скоростей. Резонанс всей массы пружинной системы приведет к перемещению детали. При другой скорости инерция вращения детали и пружинная система заставят ее вращаться вокруг вертикальной оси.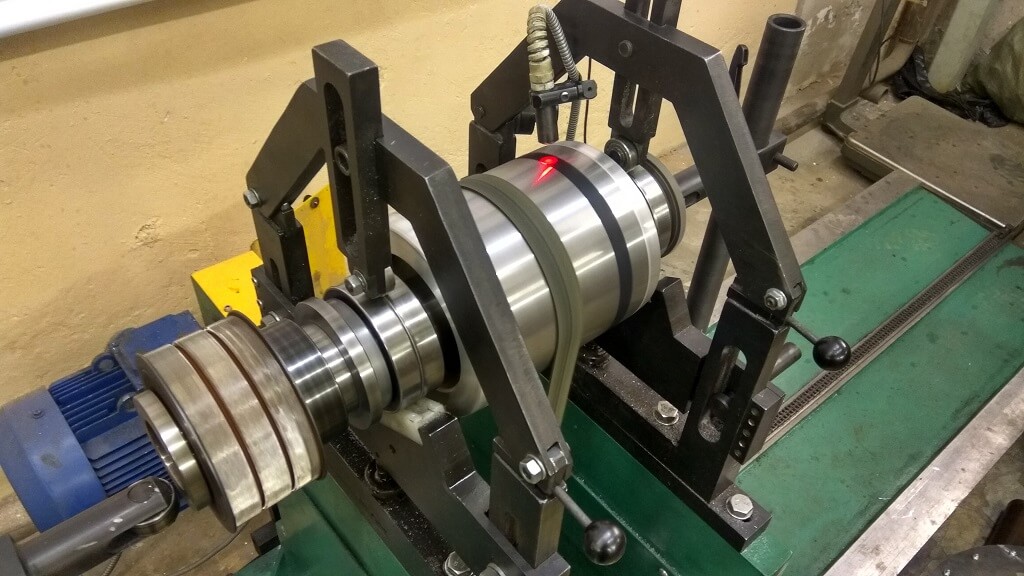 Это еще одна причина избегать этого диапазона скорости бега.
Это еще одна причина избегать этого диапазона скорости бега.
БАЛАНСИРОВОЧНОЕ ОБОРУДОВАНИЕ
СТАТИЧЕСКИЕ БАЛАНСИРОВЩИКИ :
Статические балансиры не вращают деталь для измерения дисбаланса. Вместо этого их работа основана на гравитации, создающей направленную вниз силу в центре тяжести. Примером более старой формы статического балансировщика является набор уровней. Хотя этот старый метод занимает очень много времени, он по-прежнему эффективен для минимизации статического дисбаланса. Сила, действующая вниз на центр тяжести, заставит деталь вращаться до тех пор, пока ЦТ не сдвинется с места. находится непосредственно под беговой поверхностью, что определяет местоположение тяжелой точки. Обычно при балансировке по уровню величина дисбаланса неизвестна, и деталь исправляется методом проб и ошибок до тех пор, пока деталь не перестанет вращаться. Однако возможно
для измерения величины дисбаланса на горизонтальном балансире. Это достигается поворотом тяжелой точки вверх на 90° и последующим измерением крутящего момента. Исторически это часто достигалось за счет использования шкалы с крючком для определения силы на известном радиусе.
Это достигается поворотом тяжелой точки вверх на 90° и последующим измерением крутящего момента. Исторически это часто достигалось за счет использования шкалы с крючком для определения силы на известном радиусе.
Современные статические балансиры измеряют детали с осью вращения детали в вертикальной ориентации, непосредственно над точкой поворота. Этот тип датчика может быстро определить как величину, так и угол дисбаланса. Сила тяжести, действующая на смещенный центр масс, создает момент на части, которая наклоняет прибор.
Статические балансиры можно разделить на два типа в зависимости от того, как они реагируют на этот момент дисбаланса: со свободным вращением, где величина наклона измеряется как прямое указание степени дисбаланса, и те, которые ограничивают величину наклона и измерить момент дисбаланса.
Статические балансиры со свободным вращением не оказывают сопротивления действующей вниз силе тяжести на ЦТ. Необходимо, чтобы C.G. заготовки и инструмента вместе должны быть на надлежащем расстоянии ниже точки поворота. Расстояние Ц.Г. ниже точки поворота определяет чувствительность балансира. Это расстояние часто устанавливается с помощью регулируемого противовеса, соединенного с инструментом под шарниром.
Расстояние Ц.Г. ниже точки поворота определяет чувствительность балансира. Это расстояние часто устанавливается с помощью регулируемого противовеса, соединенного с инструментом под шарниром.
При отсутствии детали на уровневом наборе инструментов C.G. изначально находится непосредственно под точкой разворота. Когда несбалансированная деталь помещается на оснастку, это приводит к тому, что Ц.Г. поднимать и смещать от центра в сторону дисбаланса. Момент, вызванный гравитацией на новом C.G. приводит к наклону инструмента до тех пор, пока новый C.G. находится прямо под стержнем. При его наклоне плечо момента и, следовательно, сам момент уменьшаются до нуля. Величина наклона определяется путем измерения расстояния между рычагом, выступающим из инструмента, и основанием станка. Величина наклона пропорциональна степени дисбаланса детали.
Измерение дисбаланса на статическом балансире чаще всего достигается с помощью двух LVDT, ориентированных под углом 90° друг к другу. Типичный шарнир состоит из точек в гнезде, шарика на наковальне, изгиба небольшого диаметра при растяжении, гидравлических сферических подшипников и воздушных сферических подшипников. У каждого есть проблемы, связанные с сохранением свободы вращения. Система механического точечного контакта должна быть механически защищена, чтобы предотвратить появление плоских пятен на шаре или вмятин на наковальне. Изгиб провода может быть согнут или сломан, если он не защищен. Сферические подшипники должны содержаться в идеальной чистоте, чтобы предотвратить сопротивление. Две дополнительные проблемы заключаются в том, что чувствительность зависит от веса детали, и шарнир должен быть хорошо защищен, чтобы предотвратить повреждение, которое может повлиять на работу балансира.
У каждого есть проблемы, связанные с сохранением свободы вращения. Система механического точечного контакта должна быть механически защищена, чтобы предотвратить появление плоских пятен на шаре или вмятин на наковальне. Изгиб провода может быть согнут или сломан, если он не защищен. Сферические подшипники должны содержаться в идеальной чистоте, чтобы предотвратить сопротивление. Две дополнительные проблемы заключаются в том, что чувствительность зависит от веса детали, и шарнир должен быть хорошо защищен, чтобы предотвратить повреждение, которое может повлиять на работу балансира.
Однако есть лучшая альтернатива, которая решает эти проблемы, она называется балансир с жестким шарниром. В этом типе балансира шарнир представляет собой стойку, которая действует как жесткая пружина. Момент из-за дисбаланса немного изгибает стойку, и измеряется наклон, чтобы определить величину дисбаланса. При использовании балансира с жестким шарниром вес детали не влияет на калибровку, а балансировочный стенд является точным, простым и чрезвычайно прочным.
ДИНАМИЧЕСКИЕ БАЛАНСИРОВЩИКИ:
Описанные выше статические балансиры полностью зависят от силы тяжести в точке ЦТ. В результате при использовании статического балансира невозможно обнаружить парную составляющую дисбаланса. Чтобы ощутить дисбаланс пары, деталь необходимо раскрутить. Такой балансир называется центробежным или динамическим балансиром. Динамические балансиры бывают двух типов: с мягкой подвеской и с жесткой подвеской.
Наиболее распространенные динамические балансиры закрепляют заготовку с горизонтальной осью вала. Однако существуют вертикальные балансиры как с мягкими, так и с жесткими подшипниками.
ДИНАМИЧЕСКИЕ БАЛАНСИРЫ С МЯГКОЙ ПОДВЕСКОЙ:
Также называются балансирами с мягкими подшипниками. Балансир с мягкой подвеской работает выше резонансной частоты подвеса балансира. В этом типе балансира деталь находится в горизонтальной плоскости без усилий и вращается вокруг главной оси инерции. Амплитуда вибрации измеряется в точках опоры для определения величины дисбаланса. Существуют проблемы с использованием измеренной информации для корректировки баланса детали. Каждая отдельная часть имеет свой калибровочный коэффициент и перекрестные помехи корректирующей информации. Другими словами, если к уравновешенной детали добавляется один дисбалансный груз в одной плоскости коррекции, информация, необходимая для прогнозирования новой линии главной оси инерции, недоступна. Один груз вызывает вибрацию на обеих подвесках, а амплитуда и соотношение этих двух вибраций неизвестны. Когда добавляется влияние веса во второй плоскости, невозможно разделить информацию о двух весах.
Существуют проблемы с использованием измеренной информации для корректировки баланса детали. Каждая отдельная часть имеет свой калибровочный коэффициент и перекрестные помехи корректирующей информации. Другими словами, если к уравновешенной детали добавляется один дисбалансный груз в одной плоскости коррекции, информация, необходимая для прогнозирования новой линии главной оси инерции, недоступна. Один груз вызывает вибрацию на обеих подвесках, а амплитуда и соотношение этих двух вибраций неизвестны. Когда добавляется влияние веса во второй плоскости, невозможно разделить информацию о двух весах.
Для определения коэффициентов калибровки и перекрестных помех необходимо добавить пробные грузы индивидуально в каждую плоскость и измерить реакцию. При использовании несбалансированной детали эффект начального дисбаланса должен быть исключен из измерений пробного веса. Когда эти факторы определены, каждый канал считывает только дисбаланс в соответствующей плоскости коррекции. Затем эти два канала имеют то, что называется разделением плоскостей. Основным недостатком балансиров с мягким подвесом является необходимость дополнительных установочных вращений для калибровки заготовок разного размера и веса.
Основным недостатком балансиров с мягким подвесом является необходимость дополнительных установочных вращений для калибровки заготовок разного размера и веса.
ДИНАМИЧЕСКИЕ БАЛАНСИРОВЩИКИ С ЖЕСТКОЙ ПОДВЕСКОЙ:
Также называются балансирами с жесткими подшипниками. Балансир жесткой подвески работает на скоростях ниже резонансной частоты подвески. Амплитуда вибрации мала, а центробежная сила, создаваемая дисбалансом, измеряется на опорных подшипниках. При использовании балансира с жесткой подвеской калибровать измерение силы необходимо только один раз. Эта однократная калибровка обычно выполняется производителем балансировочного станка на собственном предприятии.
Используя измерение силы и точное измерение скорости, электроника балансировочного станка может рассчитать поправки, необходимые для плоскостей опорных подшипников. Однако, поскольку поправки не могут быть выполнены в опорных плоскостях, информация о дисбалансе должна быть преобразована в две корректирующие плоскости. Для расчета расположение корректирующих плоскостей относительно опорных плоскостей вводится оператором при настройке балансира на конкретную деталь.
Для расчета расположение корректирующих плоскостей относительно опорных плоскостей вводится оператором при настройке балансира на конкретную деталь.
В дополнение к преимуществу калибровки по своей природе, балансиры с жесткой подвеской: проще в использовании, безопаснее в использовании и обеспечивают жесткую рабочую опору. В балансирах с жесткой подвеской можно предусмотреть прижимные подшипники, чтобы справиться с отрицательной нагрузкой, которая может возникнуть, когда деталь выходит за пределы двух опорных подшипников.
Все описанные балансиры реализованы с аналоговой электроникой. Однако базовые расчеты, необходимые для разделения и перемещения плоскостей, требуют сложных схем, которые, в свою очередь, требуют подгонки и настройки. Компьютерная электроника идеально подходит для этих приложений. Кроме того, компьютерная электроника может запоминать настройки деталей для быстрого вызова, собирать данные о дисбалансе, предоставлять статистическую информацию и выводить данные на принтер или дисковод.
