

Содержание
Схемы генерирования переменного напряжения постоянной частоты
Страница 2 из 2
Известен ряд схем, предназначенных для преобразования механической энергии ВЭУ в электрическую энергию переменного напряжения постоянной частоты.
Синхронный генератор. Наиболее простая схема включает синхронный генератор, работающий параллельно с энергосистемой. Поскольку обычно мощность энергосистемы на много больше мощности ВЭУ, электрическая машина будет находиться в синхронизме в широком диапазоне изменения мощности, развиваемой ветродвигателем. Недостатки применения синхронной машины состоят в том, что при определенных ветровых условиях она может переходить на работу в режим двигателя и потреблять энергию из энергосистемы, а при резких порывах ветра появляется большая вероятность выпадения ее из синхронизма. Последующая синхронизация машины и подключение ее к энергосистеме являются сложным процессом.
Асинхронный генератор. Если асинхронная машина приводится во вращение с частотой, большей, чем синхронная частота, она работает как генератор. До тех пор, пока под действием привода частота вращения машины превышает синхронную частоту, она подает электроэнергию в энергосистему с частотой, равной частоте сети. Однако использование в ВЭУ асинхронной машины имеет три следующих недостатка: при одном и том же ветровом режиме юна вырабатывает меньше энергии, чем синхронная машина; она работает с меньшим коэффициентом мощности (cos φ), обусловленным большими токами намагничивания, которые приблизительно пропорциональны квадрату напряжения; наконец, она более дорогая по сравнению с синхронной машиной. Следует отметить, однако, что последний недостаток компенсируется снижением затрат на механизмы системы регулирования, поскольку в случае использования асинхронной машины допускается менее точное поддержание частоты вращения ветроколеса.
До тех пор, пока под действием привода частота вращения машины превышает синхронную частоту, она подает электроэнергию в энергосистему с частотой, равной частоте сети. Однако использование в ВЭУ асинхронной машины имеет три следующих недостатка: при одном и том же ветровом режиме юна вырабатывает меньше энергии, чем синхронная машина; она работает с меньшим коэффициентом мощности (cos φ), обусловленным большими токами намагничивания, которые приблизительно пропорциональны квадрату напряжения; наконец, она более дорогая по сравнению с синхронной машиной. Следует отметить, однако, что последний недостаток компенсируется снижением затрат на механизмы системы регулирования, поскольку в случае использования асинхронной машины допускается менее точное поддержание частоты вращения ветроколеса.
Преобразование электрической энергии по схеме «переменное напряжение — постоянное напряжение — переменное напряжение» осуществляется следующим образом. Переменное напряжение переменной частоты от синхронного генератора преобразуют сначала в постоянное напряжение, а затем в переменное напряжение требуемой постоянной частоты для подачи электроэнергии в энергосистему. Перки Томас предложил модификацию этой схемы с использованием генератора постоянного тока, соединенного с вращающимся преобразователем напряжения. Но мощность генераторов постоянного тока ограничена их приемлемыми размерами, а вращающиеся преобразователи напряжения малоэффективны. Преобразование по схеме «переменное напряжение — постоянное напряжение — переменное напряжение» может быть успешно осуществлено на базе полупроводниковых приборов. Такие преобразователи мощностью от одного до нескольких мегаватт широко применяются на передачах постоянного тока высокого напряжения. Их недостатком является высокая стоимость. Однако при расположении ВЭС большой мощности на значительном расстоянии от энергосистем именно передачи постоянного тока оказываются наиболее эффективными.
Перки Томас предложил модификацию этой схемы с использованием генератора постоянного тока, соединенного с вращающимся преобразователем напряжения. Но мощность генераторов постоянного тока ограничена их приемлемыми размерами, а вращающиеся преобразователи напряжения малоэффективны. Преобразование по схеме «переменное напряжение — постоянное напряжение — переменное напряжение» может быть успешно осуществлено на базе полупроводниковых приборов. Такие преобразователи мощностью от одного до нескольких мегаватт широко применяются на передачах постоянного тока высокого напряжения. Их недостатком является высокая стоимость. Однако при расположении ВЭС большой мощности на значительном расстоянии от энергосистем именно передачи постоянного тока оказываются наиболее эффективными.
Специальные схемы возбуждения.
Синхронный генератор с модулированным выходным напряжением.
Из различных предложенных схем данного типа наибольший интерес представляет преобразовательная схема с выходным напряжением, модулированным низкой частотой. В этой схеме напряжение возбуждения синхронного генератора — переменное с частотой 60 Гц. Выходное напряжение, промодулированное синусоидальными колебаниями, выпрямляется и подается на фильтр для получения на выходе переменного напряжения с частотой 60 Гц. Хотя идея этого метода интересна, основанная на ней система получается дорогой и сложной. Возбуждение переменным током требует, чтобы электрическая машина была выполнена полностью шихтованной. К тому же преобразование напряжения на выходе генератора требует использования полупроводниковых приборов. В результате количество полупроводниковых приборов, имеющихся в выпрямительно-инверторной и в данной схемах, может быть сравнимо, в то время как последней недостает экономического преимущества схемы преобразования «переменное напряжение — постоянное напряжение — переменное напряжение», которая используется в передачах постоянного тока высокого напряжения. Кроме того, чтобы поддерживать Малое отношение модуляции, что является очень важным, частота генерируемого напряжения, а следовательно, и частота вращения генератора должны быть высокими.
В этой схеме напряжение возбуждения синхронного генератора — переменное с частотой 60 Гц. Выходное напряжение, промодулированное синусоидальными колебаниями, выпрямляется и подается на фильтр для получения на выходе переменного напряжения с частотой 60 Гц. Хотя идея этого метода интересна, основанная на ней система получается дорогой и сложной. Возбуждение переменным током требует, чтобы электрическая машина была выполнена полностью шихтованной. К тому же преобразование напряжения на выходе генератора требует использования полупроводниковых приборов. В результате количество полупроводниковых приборов, имеющихся в выпрямительно-инверторной и в данной схемах, может быть сравнимо, в то время как последней недостает экономического преимущества схемы преобразования «переменное напряжение — постоянное напряжение — переменное напряжение», которая используется в передачах постоянного тока высокого напряжения. Кроме того, чтобы поддерживать Малое отношение модуляции, что является очень важным, частота генерируемого напряжения, а следовательно, и частота вращения генератора должны быть высокими.
Некоторые из рассмотренных выше схем уже были использованы в ВЭУ в прошлом. Однако каждая из них имеет свои недостатки. В Университете штата Висконсин (Милуоки) были исследованы две системы, которые могут оказаться более эффективными, чем рассмотренные выше. Эти системы используют: первая — коллекторный генератор переменного тока, вторая—асинхронный, генератор с питаемым ротором.
Рис. 3. Принципиальная схема коллекторного генератора переменного тока:
1 — ротор генератора; 2 — обмотки возбуждения; 3 — блок управления.
Коллекторный генератор переменного тока. Он упоминается как возможный для применения в ВЭУ, хотя и не был использован ранее в какой-либо сооруженной установке. Действительно, это предложение является перспективным применительно, к ВЭУ мощностью, вероятно, не превышающей 1000 кВт.
Преимущество этой системы заключается в том, что частота: напряжения на выходе коллекторного генератора переменного тока равна частоте напряжения возбуждения независимо от частоты вращения ротора.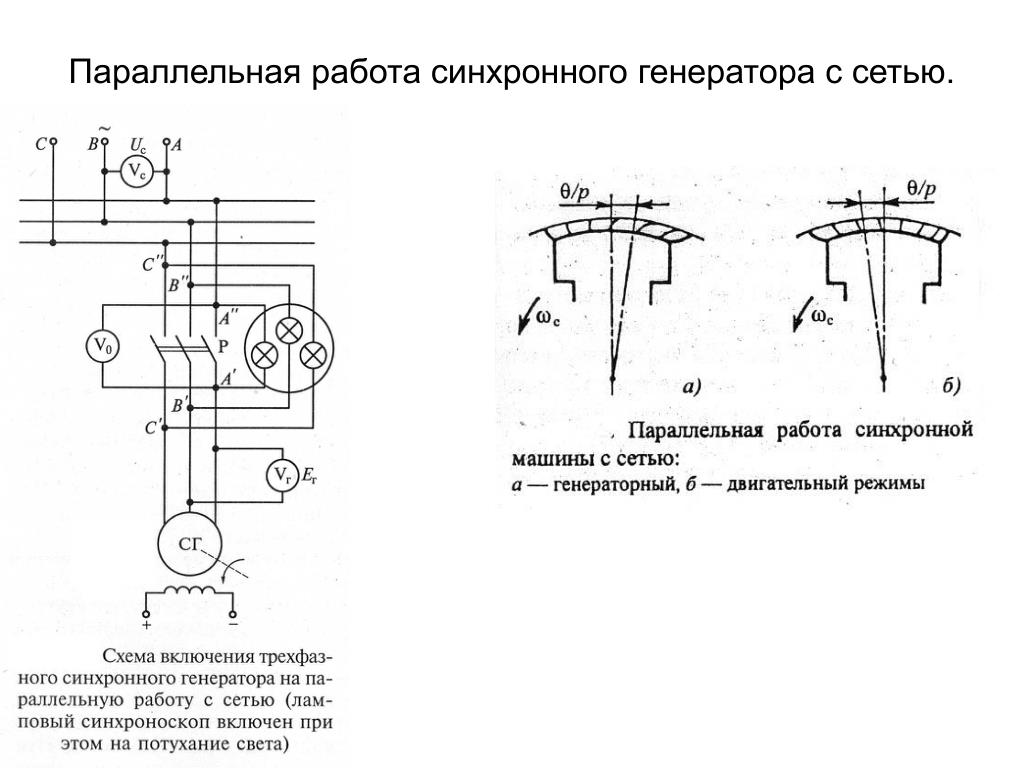 В этом отношении коллекторная машина переменного тока подобна машине постоянного тока. Если возбуждение машины осуществляется током 60 Гц, машина будет генерировать переменное напряжение такой же частоты (рис. 3 и 4).
В этом отношении коллекторная машина переменного тока подобна машине постоянного тока. Если возбуждение машины осуществляется током 60 Гц, машина будет генерировать переменное напряжение такой же частоты (рис. 3 и 4).
Рис. 4. Электрическая схема коллекторного генератора переменного тока:
1 — обмотки возбуждения; 2 — компенсационные обмотки.
Конструктивно машина достаточно проста, ее якорь подобен; якорю машины постоянного тока. Стоимость коллекторного генератора переменного тока близка к стоимости генератора постоянного тока, и поэтому с экономической точки зрения он конкурентоспособен. Кроме того, в нем отсутствуют дополнительные устройства. Наконец, машина может быть спроектирована и работать с намного большим cos φ, чем асинхронный генератор, у которого, как известно, низкое значение cos φ является большим недостатком.
Асинхронный генератор с питаемым ротором.
Асинхронные машины работают как генераторы, когда их частота вращения больше, чем синхронная частота. Такой асинхронный генератор уже был использован в мощных установках. Однако в прошлом были выдвинуты серьезные возражения против применения этих машин для работы в энергосистеме. Для того чтобы получить приемлемую мощность, диаметр этих машин вследствие низкой частоты вращения должен быть достаточно большим. Для удовлетворительной работы машина должна иметь большой воздушный зазор, что приводит к большому увеличению тока намагничивания, который должна обеспечить энергосистема при малом COS φ.
Такой асинхронный генератор уже был использован в мощных установках. Однако в прошлом были выдвинуты серьезные возражения против применения этих машин для работы в энергосистеме. Для того чтобы получить приемлемую мощность, диаметр этих машин вследствие низкой частоты вращения должен быть достаточно большим. Для удовлетворительной работы машина должна иметь большой воздушный зазор, что приводит к большому увеличению тока намагничивания, который должна обеспечить энергосистема при малом COS φ.
Рис. 5. Схема асинхронного генератора с питаемым ротором:
1 — генератор тока частоты скольжения; 2 и п — соответственно ротор и статор асинхронного генератора; 4 — датчики частоты вращения;
Главное преимущество асинхронного генератора состоит в том, что напряжение на его выходе имеет постоянную частоту при изменении частоты вращения ротора в некоторых пределах и ему свойственна большая устойчивость, чем синхронной машине. Последнее обстоятельство крайне важно в связи с тем, что ВЭУ становятся довольно мощными.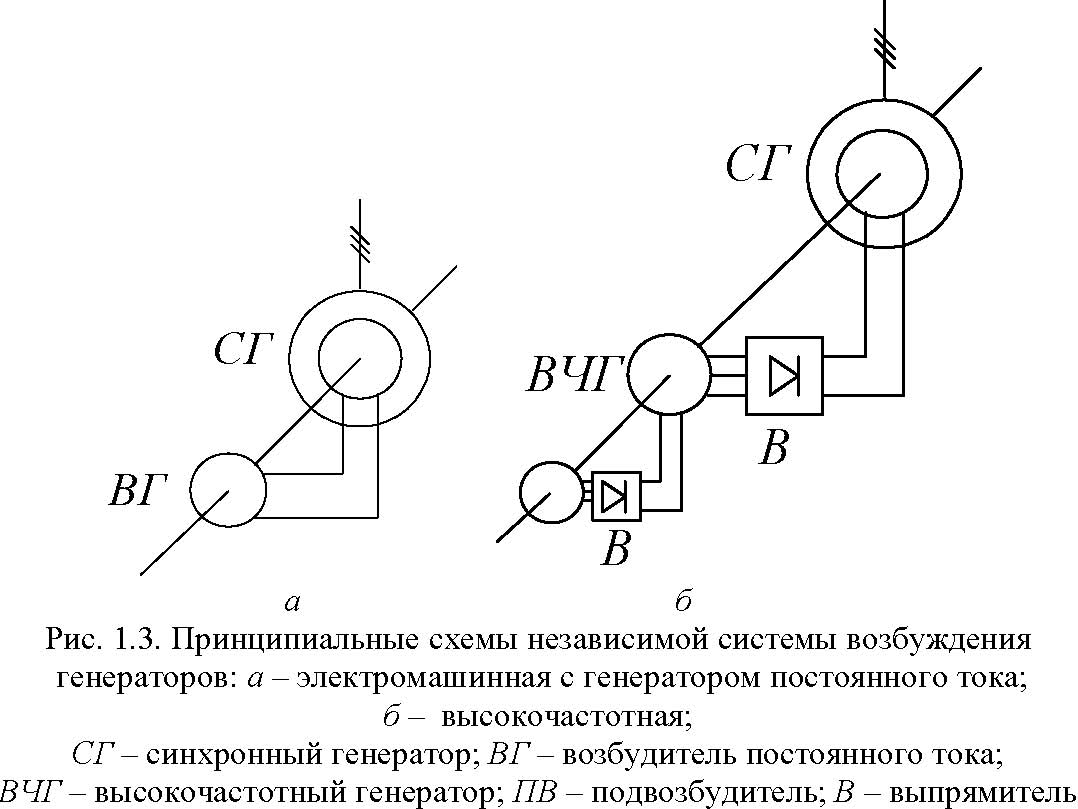
Чтобы преодолеть указанный выше серьезный недостаток асинхронного генератора (малый cos φ), предлагается питать током ротор машины. Такой генератор (рис. 5) подобен асинхронному генератору с фазным ротором. Обмотки его ротора подсоединены к контактным кольцам. Питание обмоток осуществляется через эти контактные кольца от дополнительного генератора напряжения с частотой скольжения 1. Абсолютное значение и фаза указанного напряжения могут изменяться. Изменением фазы напряжения, подаваемого в цепь ротора, имеющего частоту, равную частоте скольжения, cos φ асинхронного генератора может быть улучшен.
1 По терминологии, принятой в России, такой генератор с питаемым ротором называется асинхронизированным.
Исследуется вопрос определения наиболее целесообразной номинальной мощности генератора напряжения с частотой скольжения, чтобы обеспечить работу основного генератора с более высоким cos φ. Это может обеспечить возможность экономической конкурентоспособности указанной схемы.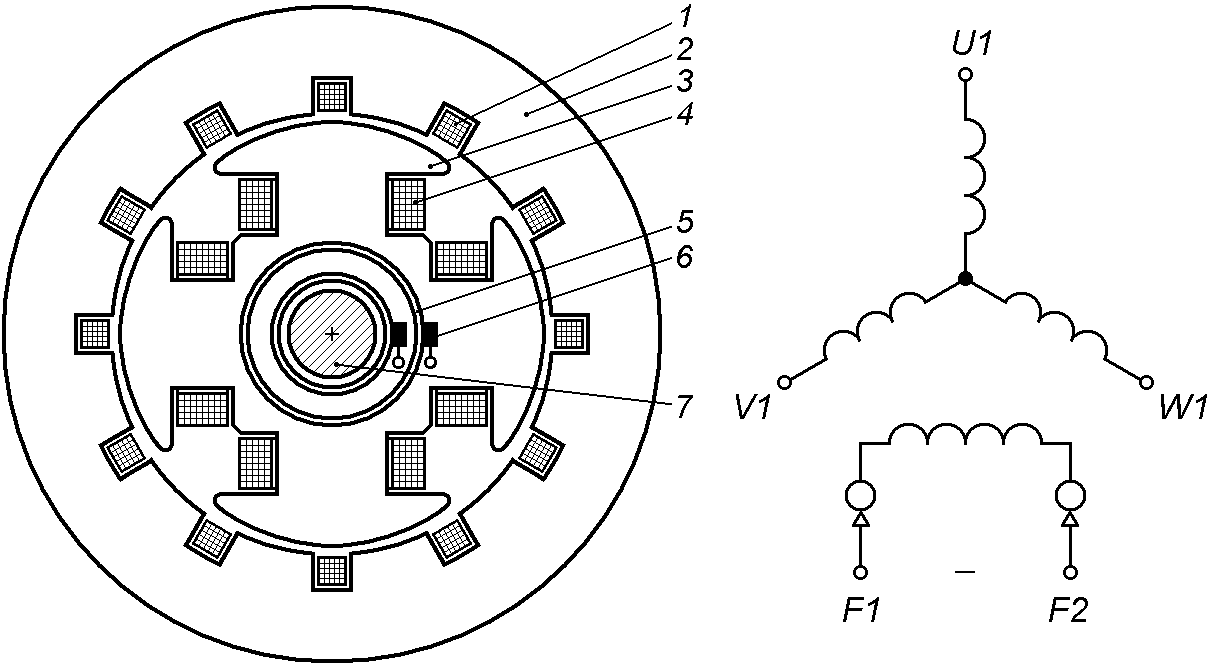
Генератор напряжения с частотой скольжения. Раньше напряжение с частотой скольжения генерировалось с помощью машин типа Шербиус. Добавление к системе дополнительной машины делает ее более громоздкой и повышает стоимость. После появления полупроводниковой техники для получения напряжения с частотой скольжения предложены различные новые устройства, приводимые ниже.
Одним из таких устройств является частотный модулятор. При: его использовании сигнал с частотой f генерируется обычным генератором с приводом от главного вала, модулируется частотой сети f0 и подается на фильтр для получения сигнала (f — f0).
По схеме «напряжение с частотой f0 — постоянное напряжение — напряжение с частотой скольжения sf 0 напряжение сети с частотой fo выпрямляется и подается на инвертор. Тиристоры открываются управляющим сигналом таким образом, чтобы получить напряжение с частотой скольжения. Если полупроводниковые управляющие приборы использованы как в инверторной, так и в выпрямительной цепях, эта схема может работать в обоих направлениях.
Для получения напряжения с частотой скольжения может быть применен также преобразователь частоты. Поскольку частота скольжения мала по сравнению с частотой сети fo , то может быть разработан преобразователь частоты для генерирования напряжения с частотой скольжения на базе использования современной электронной техники больших мощностей.
Во всех рассмотренных системах между генератором напряжения с частотой скольжения и контактными кольцами ротора основного генератора при необходимости может быть установлен усилитель мощности.
Преимуществом этих схем перед другими схемами является то, что используемые в них полупроводниковые приборы рассчитываются только на мощность, необходимую для возбуждения основного генератора, тогда как в других схемах полупроводниковые приборы рассчитываются на всю мощность ВЭУ.
С использованием в системе управления частотой вращения, асинхронного двигателя подобной полупроводниковой техники, рассчитанной на 2/3 установленной мощности, получено увеличение, значения cos φ до 0,95.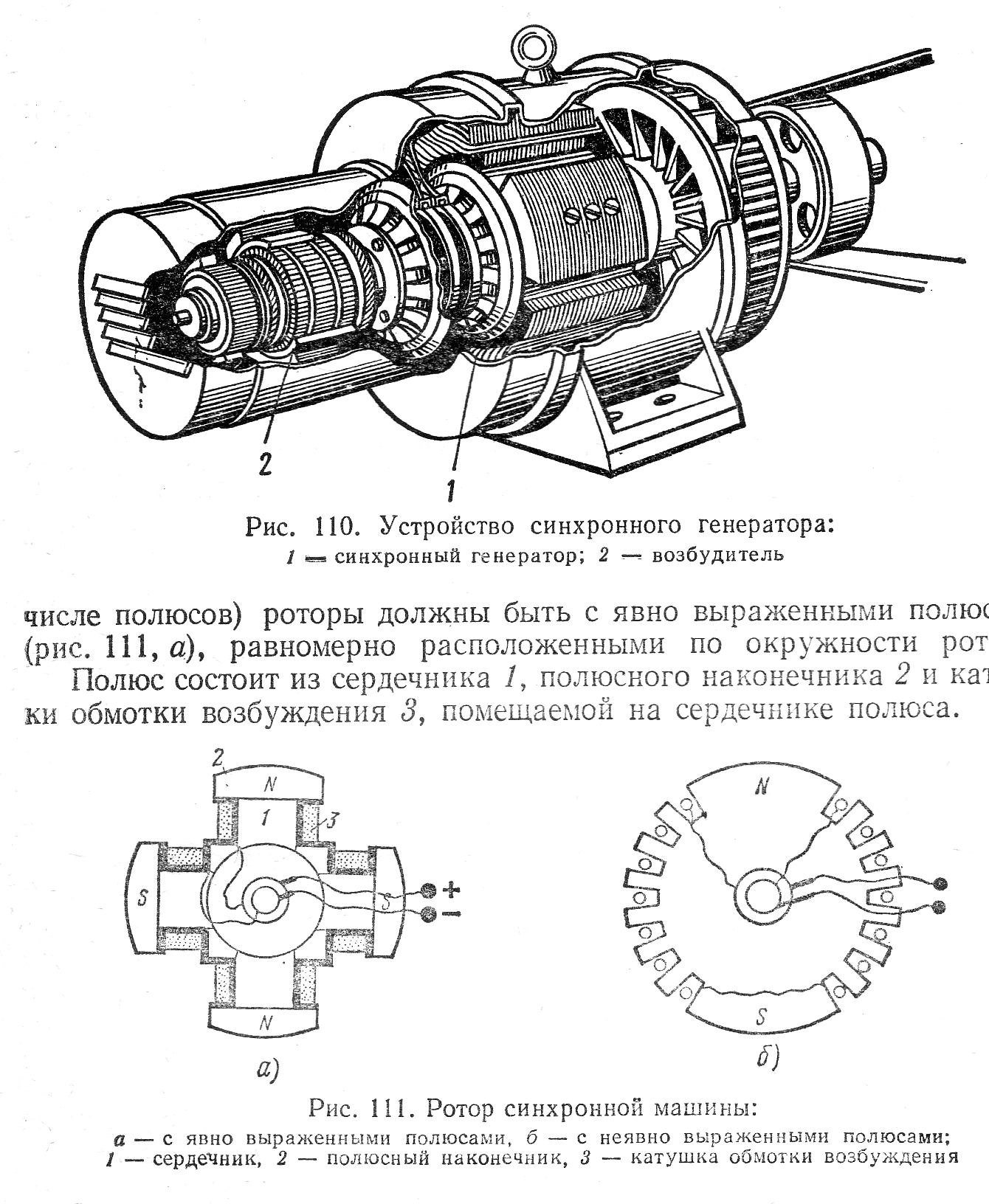 Учитывая, что пределы изменения частоты скольжения в асинхронном генераторе меньше, чем в двигателе, преимущества в этом случае могут быть более значительными.
Учитывая, что пределы изменения частоты скольжения в асинхронном генераторе меньше, чем в двигателе, преимущества в этом случае могут быть более значительными.
Синхронный и асинхронный генераторы. Отличия
Генератор — устройство, преобразующее один вид энергии в другой.
В данном случае рассматриваем преобразование механической энергии вращения в электрическую.
Различают два типа таких генераторов. Синхронные и асинхронные.
Синхронный генератор. Принцип действия
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке
статора, и частотой вращения ротора n , называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
Обычно частота вращения выражается в об/мин, а частота ЭДС в Герцах (1/сек), тогда для количества оборотов в минуту формула примет вид:
n = 60·f / p
На рис. 1.1 представлена функциональная схема синхронного генератора. На статоре 1 расположена трёхфазная обмотка, принципиально не отличающаяся от аналогичной обмотки асинхронной машины. На роторе расположен электромагнит с обмоткой возбуждения 2, получающей питание постоянным током, как правило, через скользящие контакты, осуществляемые посредством двух контактных колец, расположенных на роторе, и двух неподвижных щёток.
1.1 представлена функциональная схема синхронного генератора. На статоре 1 расположена трёхфазная обмотка, принципиально не отличающаяся от аналогичной обмотки асинхронной машины. На роторе расположен электромагнит с обмоткой возбуждения 2, получающей питание постоянным током, как правило, через скользящие контакты, осуществляемые посредством двух контактных колец, расположенных на роторе, и двух неподвижных щёток.
В некоторых случаях в конструкции ротора синхронного генератора вместо электромагнитов могут использоваться постоянные магниты, тогда необходимость в наличии контактов на валу отпадает, но существенно ограничиваются возможности стабилизации выходных напряжений.
Приводным двигателем (ПД), в качестве которого используется турбина, двигатель внутреннего сгорания либо другой источник механической энергии, ротор генератора приводится во вращение с синхронной скоростью. При этом магнитное поле электромагнита ротора также вращается с синхронной скоростью и индуцирует в трёхфазной обмотке статора переменные ЭДС EA , EB и EC , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трёхфазную систему ЭДС.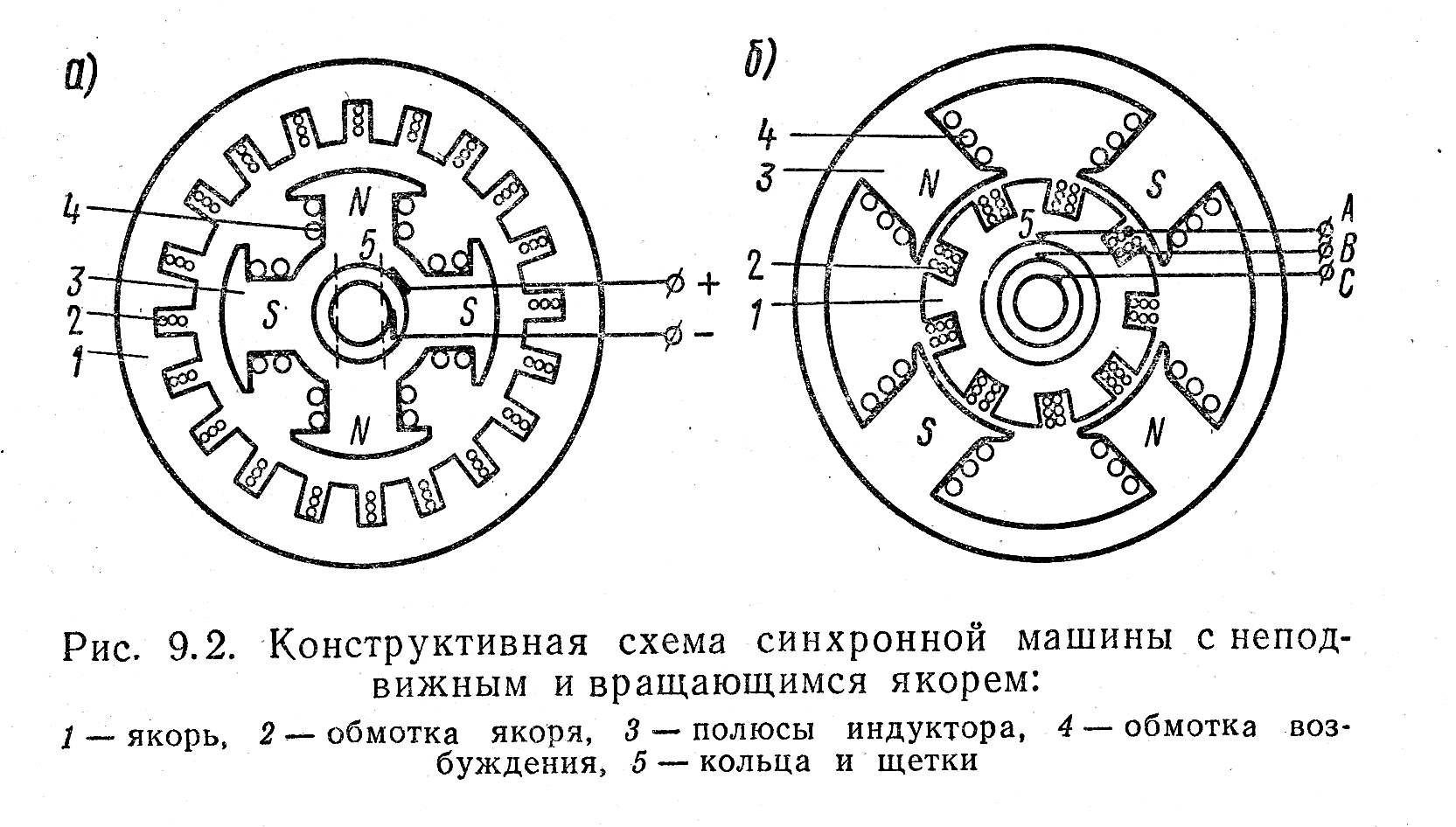
C подключением нагрузки к зажимам обмотки статора С1, С2 и С3 в фазах обмотки статора появляются токи
IA, IB, IC , которые создают вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора. Таким образом, в синхронном генераторе магнитное поле статора и ротор вращаются синхронно. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе
e = 2Blwv = 2πBlwDn
Здесь:
B – магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл;
l – активная длина одной пазовой стороны обмотки статора, т.е. длина сердечника статора, м;
w – количество витков;
v = πDn – линейная скорость движения полюсов ротора относительно статора, м/с;
D – внутренний диаметр сердечника статора, м.
Формула ЭДС показывает, что при неизменной частоте вращения ротора n форма графика переменной ЭДС обмотки якоря (ста-
тора) определяется исключительно законом распределения магнитной индукции B в зазоре между статором и полюсами ротора. Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В
Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В
синхронных машинах всегда стремятся получить распределение индукции в зазоре как можно ближе к синусоидальному.
Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде.
Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
f = pn
где p – число пар полюсов.
В рассматриваемом генераторе (см. рис.1.1) два полюса, т.е. p = 1.
рис.1.1) два полюса, т.е. p = 1.
Для получения ЭДС промышленной частоты (50 Гц) в таком генераторе ротор необходимо вращать с частотой n = 50 об/с (n = 3000 об/мин).
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.
До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).
Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного
тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда
энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий
трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Асинхронный генератор. Отличия от синхронного
Асинхронные генераторы принципиально отличаются от синхронных отсутствием жесткой зависимости между частотой вращения ротора и вырабатываемой ЭДС. Разницу между этими частотами характеризует коэффициент s — скольжение.
s = (n — n r )/n
здесь:
n — частота вращения магнитного поля (частота ЭДС).
n r — частота вращения ротора.
Более подробно с расчётом скольжения и частоты можно ознакомиться в статье: асинхронные генераторы. Частота.
В обычном режиме электромагнитное поле асинхронного генератора под нагрузкой оказывает тормозной момент на вращения ротора, следовательно, частота изменения магнитного поля меньше, поэтому скольжение будет отрицательным.
К генераторам, работающим в области положительных скольжений, можно отнести асинхронные тахогенераторы и преобразователи частоты.
Асинхронные генераторы в зависимости от конкретных условий применения выполняются с короткозамкнутым, фазным или полым ротором. Источниками формирования необходимой энергии возбуждения ротора могут являться статические конденсаторы или вентильные преобразователи с искусственной коммутацией вентилей.
Асинхронные генераторы можно классифицировать по способу возбуждения, характеру выходной частоты (изменяющаяся, постоянная),
способу стабилизации напряжения, рабочим областям скольжения, конструктивному выполнению и числу фаз.
Последние два признака характеризуют конструктивные особенности генераторов.
Характер выходной частоты и методы стабилизации напряжения в значительной степени обусловлены способом образования магнитного потока.
Классификация по способу возбуждения является основной.
Можно рассмотреть генераторы с самовозбуждением и с независимым возбуждением.
Самовозбуждение в асинхронных генераторах может быть организовано:
а) с помощью конденсаторов, включенных в цепь статора или ротора или одновременно в первичную и вторичную цепи;
б) посредством вентильных преобразователей с естественной и искусственной коммутацией вентилей.
Независимое возбуждение может осуществляться от внешнего источника переменного напряжения.
По характеру частоты самовозбуждающиеся генераторы разделяются на две группы. К первой из них относятся источники практически постоянной (или постоянной) частоты, ко второй переменной (регулируемой) частоты. Последние применяются для питания
асинхронных двигателей с плавным изменением частоты вращения.
Более подробно рассмотреть принцип работы и конструктивные особенности асинхронных генераторов планируется рассмотреть в отдельных публикациях.
Асинхронные генераторы не требуют в конструкции сложных узлов для организации возбуждения постоянным током или применения дорогостоящих материалов с большим запасом магнитной энергии, поэтому находят широкое применение у пользователей передвижных электроустановок по причине своей простоты и неприхотливости в обслуживании. Используются для питания устройств, не требующих жёсткой привязки к частоте тока.
Используются для питания устройств, не требующих жёсткой привязки к частоте тока.
Техническим достоинством асинхронных генераторов можно признать их устойчивость к перегрузкам и коротким замыканиям.
С некоторой информацией по мобильным генераторным установкам можно ознакомиться на странице:
Дизель-генераторы.
Асинхронный генератор. Характеристики.
Асинхронный генератор. Стабилизация.
Замечания и предложения принимаются и приветствуются!
Короткое замыкание синхронной машины без нагрузки
Короткое замыкание синхронной машины без нагрузки – В установившихся условиях короткого замыкания реакция якоря синхронного генератора создает размагничивающий поток. С точки зрения схемы этот эффект моделируется как реактивное сопротивление X a последовательно с ЭДС индукции. Это реактивное сопротивление в сочетании с реактивным сопротивлением рассеяния X l машины называется синхронным реактивным сопротивлением X d (синхронное реактивное сопротивление прямой оси в случае явнополюсных машин). Сопротивлением якоря можно пренебречь. Установившаяся модель короткого замыкания синхронной машины без нагрузки показана на рис. 9.3а для каждой фазы.
Сопротивлением якоря можно пренебречь. Установившаяся модель короткого замыкания синхронной машины без нагрузки показана на рис. 9.3а для каждой фазы.
Рассмотрим теперь внезапное короткое замыкание (трехфазное) синхронного генератора, первоначально работавшего в условиях разомкнутой цепи. Машина претерпевает переходные процессы во всех трех фазах, в конечном итоге приводя к устойчивым условиям, описанным выше.
Автоматический выключатель должен, конечно, прерывать ток задолго до того, как будут достигнуты установившиеся условия. Сразу после короткого замыкания во всех трех фазах появляются постоянные токи смещения, каждая из которых имеет разную величину, поскольку точка на волне напряжения, в которой происходит короткое замыкание, различна для каждой фазы. Эти постоянные токи смещения учитываются отдельно на эмпирической основе, и поэтому при исследованиях короткого замыкания нам необходимо сосредоточить внимание на симметричных (синусоидальных) токах короткого замыкания 9только 0010.
Непосредственно в случае короткого замыкания симметричный ток короткого замыкания ограничивается только реактивным сопротивлением рассеяния машины. Поскольку поток в воздушном зазоре не может изменяться мгновенно ( теорема о постоянных потокосцеплениях ), для противодействия размагничиванию тока короткого замыкания якоря в обмотке возбуждения, а также в демпферной обмотке возникают токи в направлении, способствующем основному потоку . Эти токи затухают в соответствии с постоянными времени обмотки.
Постоянная времени демпферной обмотки с низкой индуктивностью рассеяния намного меньше, чем у обмотки возбуждения с высокой индуктивностью рассеяния. Таким образом, на начальном участке короткого замыкания в демпферной обмотке и обмотке возбуждения индуцируются трансформаторные токи так, что в модели цепи их реактивные сопротивления — X f обмотки возбуждения и X dw демпферной обмотки — появляются параллельно X a , как показано на рис.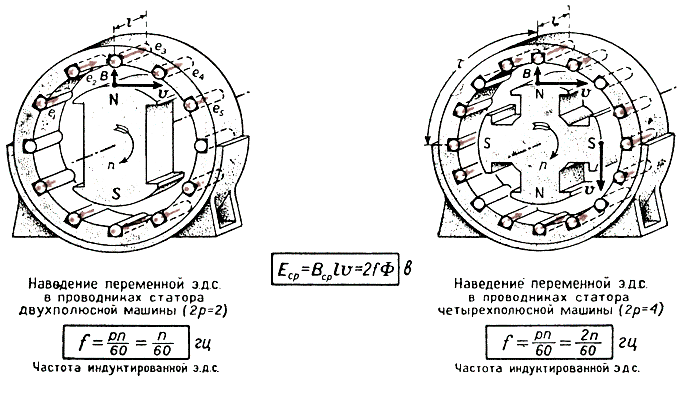 9.3b. Так как в первую очередь затухают токи демпферной обмотки, X dw фактически становится разомкнутым, а на более позднем этапе X f становится разомкнутым. Таким образом, реактивное сопротивление машины изменяется от параллельной комбинации X a , X f и X dw в начальный период короткого замыкания до X a и X f , соединенных параллельно (рис. 9.3c). в среднем периоде короткого замыкания и, наконец, до X a в установившемся режиме (рис. 9.3а). Реактивное сопротивление, представленное машиной в начальный период короткого замыкания, т.е.
9.3b. Так как в первую очередь затухают токи демпферной обмотки, X dw фактически становится разомкнутым, а на более позднем этапе X f становится разомкнутым. Таким образом, реактивное сопротивление машины изменяется от параллельной комбинации X a , X f и X dw в начальный период короткого замыкания до X a и X f , соединенных параллельно (рис. 9.3c). в среднем периоде короткого замыкания и, наконец, до X a в установившемся режиме (рис. 9.3а). Реактивное сопротивление, представленное машиной в начальный период короткого замыкания, т.е.
называется сверхпереходным реактивным сопротивлением машины. В то время как реактивное сопротивление, действующее после исчезновения токов демпферной обмотки, т. е.
, называется переходным реактивным сопротивлением машины. Конечно, реактивное сопротивление в установившемся режиме является синхронным реактивным сопротивлением машины.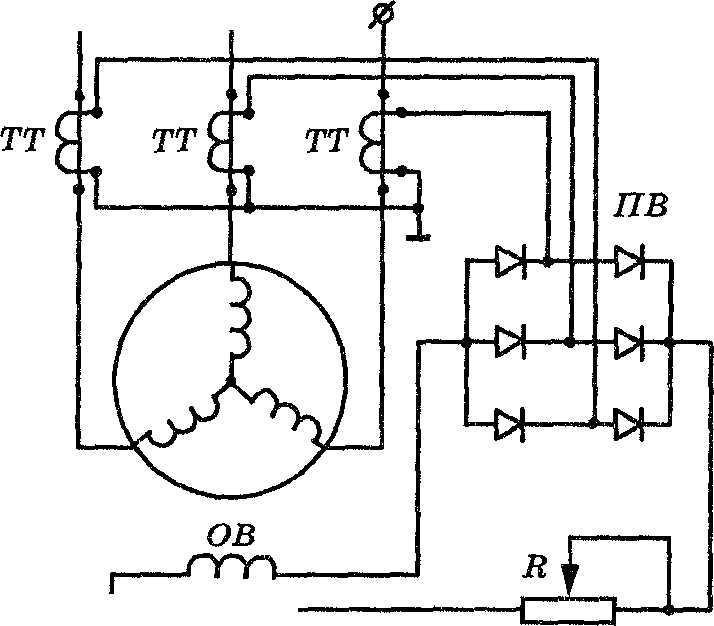 Очевидно, X″ d
Очевидно, X″ d
Если рассмотреть осциллограмму тока короткого замыкания синхронной машины без нагрузки после удаления из нее постоянных токов смещения, то мы найдем форму волны тока, как показано на рис. 9.4а. Огибающая формы волны тока изображена на рис. 9.4б. Ток короткого замыкания можно разделить на три периода: начальный сверхпереходный период, когда ток велик, поскольку машина предлагает сверхпереходное реактивное сопротивление, средний переходный период, когда машина предлагает переходную реактивность, и, наконец, период устойчивого состояния, когда машина предлагает синхронное реактивное сопротивление.
Если переходная огибающая экстраполируется назад во времени, разница между переходной и субпереходной огибающими представляет собой ток Δi″ (соответствующий току демпферной обмотки), который быстро затухает в соответствии с постоянной времени демпферной обмотки. Точно так же разность Δi’ между огибающими стационарного состояния и переходного процесса затухает в соответствии с постоянной времени поля.
Точно так же разность Δi’ между огибающими стационарного состояния и переходного процесса затухает в соответствии с постоянной времени поля.
На основе осциллограммы токов и реактивных сопротивлений, рассмотренных выше, можно записать
где
- |I| = установившийся ток (действующее значение)
- |Я’| = переходный ток (среднеквадратичное значение) без учета постоянной составляющей
- |Я»| = сверхпереходной ток (среднеквадратичное значение), исключая постоянную составляющую
- X d = синхронное реактивное сопротивление прямой оси
- X′ d = переходное реактивное сопротивление по прямой оси
- X» d = сверхпереходное реактивное сопротивление по прямой оси
- |E г | = напряжение холостого хода на фазу (действующее значение)
- Oa, Ob, Oc = точки пересечения, показанные на рис. 9.4а и б.
Точка пересечения Ob для определения переходного реактивного сопротивления может быть точно определена с помощью логарифмического графика. И Δi″, и Δi′ экспоненциально затухают как
И Δi″, и Δi′ экспоненциально затухают как
, где T dw и T f соответственно демпфер, и постоянные времени обмотки возбуждения с T dw ≪ T f . В момент времени t ≫ T dw Δi″ практически исчезает, и мы можем записать
График зависимости log (Δi″ + Δi′) от времени для t ≫ T 9Таким образом, 0003 dw становится прямой линией с наклоном (- Δi′ 0 /T f ), как показано на рис. 9.5. Поскольку прямолинейная часть графика экстраполирована (прямолинейная экстраполяция намного точнее, чем экспоненциальная экстраполяция на рис. 9.4), точка пересечения, соответствующая t = 0, равна
, где
- r Сопротивление переменного тока обмотки якоря по фазам.
Хотя реактивные сопротивления машин зависят от магнитного насыщения (соответствующего возбуждению), значения реактивных сопротивлений обычно находятся в определенных предсказуемых пределах для различных типов машин. Таблица 9.1 приведены типичные значения реактивных сопротивлений машин, которые можно использовать при расчетах отказов и исследованиях устойчивости.
Таблица 9.1 приведены типичные значения реактивных сопротивлений машин, которые можно использовать при расчетах отказов и исследованиях устойчивости.
Обычно сверхпереходные реактивные сопротивления генератора и двигателя используются для определения мгновенного тока, протекающего при возникновении короткого замыкания. Для определения отключающей способности автоматических выключателей, за исключением мгновенно размыкающихся, используется сверхпереходное реактивное сопротивление для генераторов и переходное реактивное сопротивление для синхронных двигателей.
Ответы: Нарисуйте принципиальную схему статического…
Стандартный учебник Delmar по электричеству 7-е издание
ISBN: 97813378
Автор: Стивен Л. Герман
Издатель: Cengage Learning
S Безопасность, основы электричества и закон Ома1 Атомная структура2 Электрические величины и закон Ома3 Статическое электричество4 Магнетизм5 Резисторы6 Последовательные цепи7 Параллельные цепи8 Комбинированные цепи9 Измерительные приборы10 Использование таблиц проводов и определение размеров проводников11 Проводимость в жидкостях и газах12 Батареи и другие источники электричества13 Магнитная индукция14 Основы тригонометрии и векторы15 Переменный ток16 Индуктивность в цепях переменного тока17 Резистивная -индуктивные последовательные цепи18 резистивно-индуктивные параллельные цепи19Конденсаторы. Двигатели постоянного тока31 Трехфазные генераторы32 Трехфазные двигатели33 Однофазные двигатели34 Установка двигателя35 Гармоники 916 expand_more
Двигатели постоянного тока31 Трехфазные генераторы32 Трехфазные двигатели33 Однофазные двигатели34 Установка двигателя35 Гармоники 916 expand_more
Вопросы главы expand_more
Задача 1RQ: Какие существуют три основных типа трехфазных двигателей? Задача 2RQ: Каков принцип работы всех трехфазных двигателей? Задача 3RQ: Что такое синхронная скорость? Задача 4RQ: Какие два фактора определяют синхронную скорость? Задача 5RQЗадача 6RQ. Назовите три фактора, определяющих крутящий момент, создаваемый асинхронным двигателем. Задача 7RQ. Является ли синхронный двигатель асинхронным двигателем? применяется к ротору? Задача 10RQ: Назовите три характеристики, которые отличают синхронный двигатель от асинхронного двигателя. Задача 11RQ: Какова функция резистора возбуждения? Задача 12RQ: Почему асинхронный двигатель никогда не может работать на синхронной скорости Задача 13RQ: Асинхронный двигатель с короткозамкнутым ротором работает со скоростью 1175 об/мин и развивает крутящий момент 22 фунт-фут. Что такое… Задача 14RQЗадача 15RQЗадача 16RQЗадача 17RQ: Назовите три фактора, определяющих величину напряжения, индуцируемого в роторе двигателя с фазным ротором. Задача 18RQ: Почему ротор двигателя с фазным ротором не будет вращаться, если цепь ротора остается открытым без… Задача 19RQ: Почему пусковой момент на А пускового тока двигателя с фазным ротором выше, чем у… Задача 20RQ: Когда синхронный двигатель является синхронным конденсатором? Задача 21RQ: Что определяет нормальную работу синхронного двигателя? возбуждение?Задача 22RQ: Как заставить синхронный двигатель иметь опережающий коэффициент мощности?Задача 23RQ: Является ли ток возбуждения синхронного двигателя переменным или постоянным?Задача 24RQПроблема 25RQПроблема 1PA: Вы работаете электриком на заводе. Ваша работа заключается в установке трехфазного двигателя с короткозамкнутым ротором мощностью 300 л. 3PA: Вы электрик, работающий на промышленном предприятии. Трехфазный двигатель с короткозамкнутым ротором мощностью 30 л.
Что такое… Задача 14RQЗадача 15RQЗадача 16RQЗадача 17RQ: Назовите три фактора, определяющих величину напряжения, индуцируемого в роторе двигателя с фазным ротором. Задача 18RQ: Почему ротор двигателя с фазным ротором не будет вращаться, если цепь ротора остается открытым без… Задача 19RQ: Почему пусковой момент на А пускового тока двигателя с фазным ротором выше, чем у… Задача 20RQ: Когда синхронный двигатель является синхронным конденсатором? Задача 21RQ: Что определяет нормальную работу синхронного двигателя? возбуждение?Задача 22RQ: Как заставить синхронный двигатель иметь опережающий коэффициент мощности?Задача 23RQ: Является ли ток возбуждения синхронного двигателя переменным или постоянным?Задача 24RQПроблема 25RQПроблема 1PA: Вы работаете электриком на заводе. Ваша работа заключается в установке трехфазного двигателя с короткозамкнутым ротором мощностью 300 л. 3PA: Вы электрик, работающий на промышленном предприятии. Трехфазный двигатель с короткозамкнутым ротором мощностью 30 л.
