

Содержание
§79. Характеристики асинхронных двигателей | Электротехника
Характеристики асинхронных двигателей.
Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
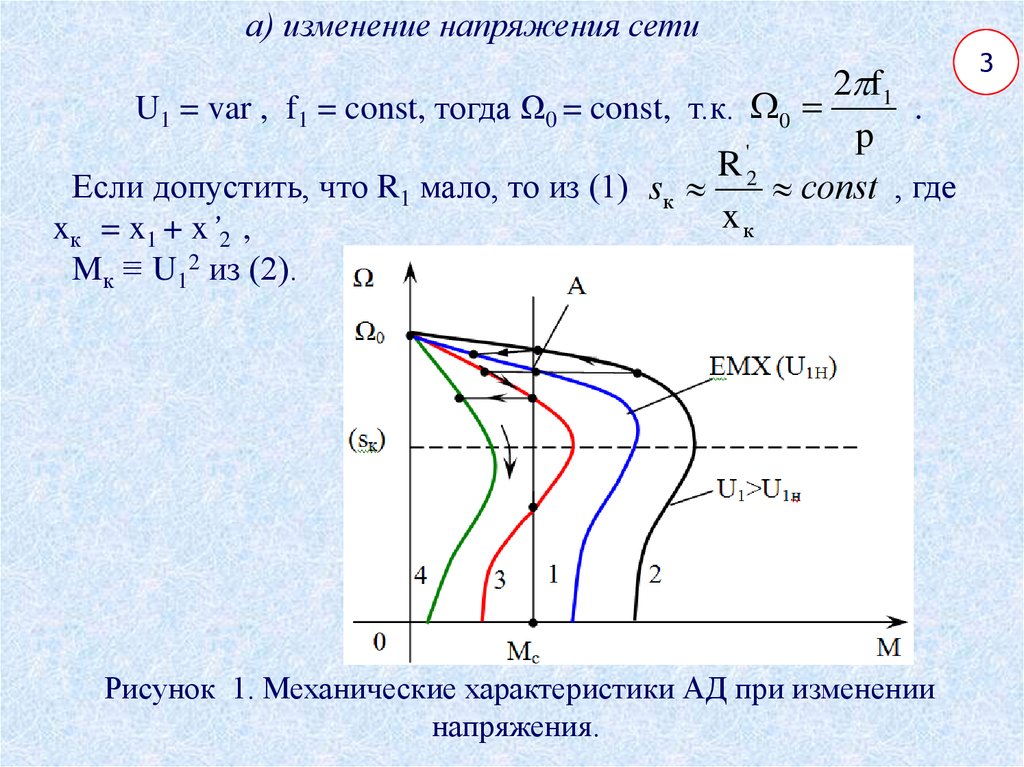
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).
Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
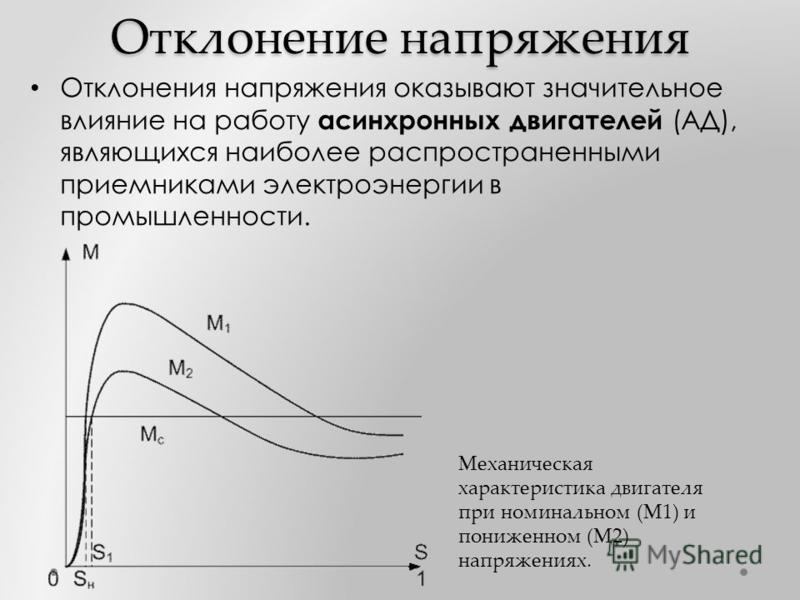
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Механическая характеристика асинхронного двигателя
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
ОГЛАВЛЕНИЕ
- Устройство асинхронной машины
- Принцип работы асинхронной машины
- Механическая характеристика
- Электромеханическая характеристика
- Рабочие характеристики
Устройство асинхронной машины
Схематичное устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:
Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:
Ток в начальный момент пуска:
Все значения отражают электромеханическую характеристику.
Рабочие характеристики
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
Индукционные моторные характеристики
Исполнительные программы
Семинары
Проекты
Карьера
Найти рабочие места
для бизнеса / университеты
Корпоративная подготовка
Понимание из US
Academic Uppling
. Выберите категорию
Идет загрузка…
Все курсы
Все курсы
ХАРАКТЕРИСТИКИ ИНДУКЦИОННОГО ДВИГАТЕЛЯ ЦЕЛЬ: Изучение принципа работы и характеристик асинхронного двигателя. Для оценки времени пуска асинхронного привода путем определения характеристик крутящего момента нагрузки и крутящего момента двигателя. Оценить состояние устойчивости асинхронного двигателя с моментно-скоростными характеристиками. ВВЕДЕНИЕ:…
Детали проекта
Загрузка. ..
..
Оставить комментарий
Спасибо, что решили оставить комментарий. Пожалуйста, имейте в виду, что все комментарии модерируются в соответствии с нашей политикой комментариев, и ваш адрес электронной почты не будет опубликован по соображениям конфиденциальности. Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, войдите, чтобы добавить комментарий
Другие комментарии…
Комментариев пока нет!
Оставьте первый комментарий
Подробнее Проекты GANESH C J (41)
Проект-1: Силовой агрегат для самолетов на взлетно-посадочных полосах
Задача:
Проект-1: Силовой агрегат для самолетов на взлетно-посадочных полосах Цель: Найти и перечислить общий вес различных типов самолетов. Кратко о различиях между путевой и воздушной скоростью. Почему не рекомендуется использовать мощность двигателя самолета для его перемещения по земле в аэропорту? Как самолет выталкивается на взлетно-посадочную полосу, когда…
07 марта 2021 14:34 IST
Подробнее
Силовой агрегат для самолетов на взлетно-посадочных полосах — HEV
Задача:
Проект-1: Силовой агрегат для самолетов на взлетно-посадочных полосах Задача: Найти и перечислить общий вес различных типов самолетов. Кратко о различиях между путевой и воздушной скоростью. Почему не рекомендуется использовать мощность двигателя самолета для его перемещения по земле в аэропорту? Как самолет выталкивают на взлетно-посадочную полосу…
Кратко о различиях между путевой и воздушной скоростью. Почему не рекомендуется использовать мощность двигателя самолета для его перемещения по земле в аэропорту? Как самолет выталкивают на взлетно-посадочную полосу…
07 марта 2021 14:33 IST
Подробнее
Картирование торможения и эффективности электродвигателей
Задача:
ТОРМОЖЕНИЕ и составление карты эффективности ЦЕЛЬ: Изучение энергии, необходимой для торможения на основе любого ездового цикла. Для изучения электрического торможения и механического торможения и характеристик торможения электродвигателя. Создать сценарий программы MATLAB для оценки графиков значений скорости, крутящего момента и эффективности. ————————————————— ————————————————— ———————————…
26 окт. 2020 г. 05:57 IST
05:57 IST
- MATLAB
Читать дальше
РАБОЧИЙ ЦИКЛ И СИЛОВАЯ ЭЛЕКТРОНИКА
Цель:
РАБОЧИЙ ЦИКЛ ЦЕЛЬ: Изучить эффективность и потери, возникающие в цепи силовой электроники. Чтобы сгенерировать управляющий сигнал рабочего цикла из простой схемы преобразователя мощности в MATLAB. Сравнение инвертора прямоугольной формы с инвертором с синусоидальной модуляцией. Чтобы изучить разницу между преобразователем частоты и приводом с векторным управлением…
03 окт. 2020 г. 06:45 IST
- MATLAB
Подробнее
ХАРАКТЕРИСТИКИ АИНХРОННОГО ДВИГАТЕЛЯ — 2
Цель:
ХАРАКТЕРИСТИКИ АИНХРОННОГО ДВИГАТЕЛЯ — 2 ЦЕЛЬ: Изучить эквивалентную схему асинхронного двигателя. Для оценки соотношения пускового момента при половинном напряжении и номинальном напряжении. Скрипт файла MATLAB для асинхронного двигателя с характеристиками крутящего момента и скорости с использованием метода управления частотой. Для изучения операции…
Скрипт файла MATLAB для асинхронного двигателя с характеристиками крутящего момента и скорости с использованием метода управления частотой. Для изучения операции…
23 сент. 2020 17:42 IST
- MATLAB
Подробнее
ХАРАКТЕРИСТИКИ АИНХРАННОГО ДВИГАТЕЛЯ
Цель:
ХАРАКТЕРИСТИКИ АИНХРОННОГО ДВИГАТЕЛЯ ЦЕЛЬ: Изучить принцип работы и характеристики асинхронного двигателя. Для оценки времени пуска асинхронного привода путем определения характеристик крутящего момента нагрузки и крутящего момента двигателя. Оценить состояние устойчивости асинхронного двигателя с моментно-скоростными характеристиками. ВВЕДЕНИЕ:…
05 сент. 2020 11:00 IST
Подробнее
Управление двигателем пост. Двигатель меняет направление вращения. Сравнить блок 4-Quadrant Chopper DC Drive (DC7) с моделью BJT H-Bridge. 0003
0003
ТРАНСМИССИЯ ЭЛЕКТРОМОБИЛЯ ЦЕЛЬ: изучить методы управления мощностью, применяемые для управления крутящим моментом и мощностью транспортного средства. Изучить коэффициент заполнения силовых модулей. Обзор асинхронных двигателей и двигателей BLDC. ВВЕДЕНИЕ: трансмиссия электромобиля/гемоглобука/основы трансмиссии Силовая передача обеспечивает питание автомобиля. Это относится к набору…
02 Aug 2020 09:13 IST
Подробнее
Характеристики машины постоянного тока
Цель:
ХАРАКТЕРИСТИКИ МАШИНЫ ПОСТОЯННОГО ТОКА ЦЕЛЬ Изучить поведение скорости и крутящего момента двигателя постоянного тока. Классификация силовых и сигнальных кабелей. Изучить уровень напряжения в аккумуляторной батарее EV/HEV. ВВЕДЕНИЕ Машина постоянного тока Машина постоянного тока может быть двух типов с двигателем постоянного тока или генератором постоянного тока, который работает на Flemings…
18 июля 2020 г. 15:12 IST
15:12 IST
- HEV
- MATLAB
Подробнее
Широко открытая дроссельная заслонка с использованием блоков силовой передачи (WOT-2).
Цель:
Состояние полностью открытой дроссельной заслонки с использованием наборов блоков силовой передачи Цель: Понять разницу между отображенной и динамической моделью двигателя, двигателя и генератора. Экономия топлива — Мили на галлон и его расчет. Запустите HEV ReferenceApplication с ездовым циклом WOT. Измените уклон и скорость ветра в блоке окружения,…
20 июня 2020 12:08 IST
- HEV
- MATLAB
Прочтите больше
Advisor Tool
Объектива:
Инструмент Advort от 500кг. Изменение емкости аккумулятора вышеуказанного транспортного средства для следующего моделирования. Выполнить тест на преодоление подъема для автомобиля PRIUS_Jpn_defaults_in. ————————————————— ————————————————— —-…
Выполнить тест на преодоление подъема для автомобиля PRIUS_Jpn_defaults_in. ————————————————— ————————————————— —-…
11 мая 2020 г. 03:56 AM IST
- MATLAB
Читать Подробнее
Широкая открытая газет. ультра грузовик наполовину загруженный. Оценить способность грузовиков преодолевать подъемы. Базовое моделирование транспортных средств с использованием Simulink. Смоделируйте реакцию WOT (Wide Open Throttle) автомобиля GM EV1. ————————————————— ————————————————— —-…
07 мая 2020 г. 01:24 AM IST
- MATLAB
Подробнее
Силы, действующие на транспортное средство. Моделирование на электрическом скутере
Цель:
Силы, действуя на транспортное средство: Простая моделирование электрического писателя Цель: Цель: Цель: Цель: Цель: целен:
. Найти максимальную скорость двигателя электросамоката, способного развивать скорость 90 км/ч, при фиксированном передаточном числе 7 и размере шин 90/100 R10 53J. То же моделирование с шиной 90/90 R18 51P. Подготовить простой калькулятор excel…
Найти максимальную скорость двигателя электросамоката, способного развивать скорость 90 км/ч, при фиксированном передаточном числе 7 и размере шин 90/100 R10 53J. То же моделирование с шиной 90/90 R18 51P. Подготовить простой калькулятор excel…
20 апреля 2020 02:35 AM IST
- MATLAB
Читать дальше
Конструкция центробежного насоса и анализ потока с использованием SolidWorks
Объектива:
Моделирование и моделирование потока через центрифугурную насос с использованием Solidlooplys Compleation Or Compleation Of Compture At Artainlably для создания A. Модель центробежного насоса и для имитации анализа потока (анализ CFD) и получения взаимосвязи между коэффициентом давления и массовым расходом. Теория Вычислительная гидродинамика (CFD) — это раздел гидромеханики , который…
10 апреля 2020 06:26 AM IST
- CFD
- Дизайн
- SolidWorks
Читать больше
Моделирование и моделирование потока по потоку с использованием SolidWorks
. FLOWBENCH С ИСПОЛЬЗОВАНИЕМ SOLIDWORKS Цель Создать 3D-модель Flowbench для имитации анализа потока (анализ CFD) и получить график зависимости подъемной силы от массового расхода. Теория Вычислительная гидродинамика (CFD) – это раздел гидромеханики, в котором используются численный анализ и данные…
FLOWBENCH С ИСПОЛЬЗОВАНИЕМ SOLIDWORKS Цель Создать 3D-модель Flowbench для имитации анализа потока (анализ CFD) и получить график зависимости подъемной силы от массового расхода. Теория Вычислительная гидродинамика (CFD) – это раздел гидромеханики, в котором используются численный анализ и данные…
08 Apr 2020 10:43 AM IST
- CFD
- FEA
- SOLIDWORKS
Читать больше
Моделирование потока в Airfoil NACA с использованием SolidWorks
. поток над аэродинамическим профилем NACA (анализ CFD) с разными углами атаки для внешнего потока и для сравнения подъемной силы и силы сопротивления. Теория Вычислительная гидродинамика (CFD) – это раздел гидромеханики, в котором используются численный анализ и данные…
07 апр. 2020 г. 05:26 IST
- CFD
- SOLIDWORKS
Подробнее
Моделирование потока на цилиндре с использованием SolidWorks.
Цель:
МОДЕЛИРОВАНИЕ ПОТОКА НАД ЦИЛИНДРОМ С ИСПОЛЬЗОВАНИЕМ SOLIDWORKS Цель Смоделировать обтекание цилиндра (анализ CFD) с предполагаемой начальной скоростью для внешнего потока и запустить базовое моделирование, а также провести параметрическое исследование с расширенным числом Рейнольдса. Теория Вычислительная гидродинамика (CFD) — это раздел гидродинамики…
06 апреля 2020 07:26 AM IST
- CFD
- SOLIDWORKS
Читать больше
MBD Моделирование на плановую передачу. Анализ планетарной передачи с солнечной шестерней, кольцевой шестерней, водилом и 4 планетарными шестернями. Введение: Динамика нескольких тел Динамическая система нескольких тел (MBD) состоит из твердых тел или звеньев, соединенных друг с другом шарнирами…
02 апр. 2020 02:12 IST
Подробнее
Моделирование течения в трубе с помощью SolidWorks
Цель:
МОДЕЛИРОВАНИЕ ПОТОКА В ТРУБЕ С ИСПОЛЬЗОВАНИЕМ SOLIDWORKS Цель: — Запустить моделирование течения в трубе с числом Рейнольдса на входе 100,1 и 10 000 и Сравнить нормализованный профиль скорости в разных местах. Теория Вычислительная гидродинамика (CFD) – это раздел гидромеханики, в котором используются численный анализ и данные…
Теория Вычислительная гидродинамика (CFD) – это раздел гидромеханики, в котором используются численный анализ и данные…
27 марта 2020 г. 01:01 IST
- CFD
- SOLIDWORKS
Подробнее
MBD Моделирование клапанного механизма двигателя внутреннего сгорания Введение Динамика нескольких тел Система динамики нескольких тел (MBD) — это система, состоящая из твердых тел или звеньев, которые соединены друг с другом шарнирами, которые ограничивают их относительное движение.…
24 марта 2020 г. 03:16 IST
Подробнее
MBD Моделирование поршня в сборе
Цель:
MBD МОДЕЛИРОВАНИЕ ПОРШНЯ В СБОРЕ Цель: — Запустить моделирование динамики нескольких тел на поршне в сборе. ВВЕДЕНИЕ Динамика нескольких тел Система динамики нескольких тел (MBD) состоит из твердых тел или звеньев, которые соединены друг с другом шарнирами, которые ограничивают их относительное движение. Изучение…
Изучение…
24 марта 2020 г. 02:23 IST
Подробнее
Многокомпонентная динамика внутреннего женевского колесного механизма
Цель:
Динамика нескольких тел механизма внутреннего женевского колеса Цель: — Выполнить анализ движения внутреннего женевского колеса. Введение: Динамика нескольких тел Динамическая система нескольких тел (MBD) состоит из твердых тел или звеньев, соединенных друг с другом шарнирами, которые ограничивают их относительное движение. The…
24 марта 2020 г. 02:08 IST
Подробнее
Частотный анализ вращающегося вала с использованием Solidworks
Цель:
ЧАСТОТНЫЙ АНАЛИЗ ВРАЩАЮЩЕГОСЯ ВАЛА Цель:- Выполнить частотный анализ вращающегося вала и найти резонансную частоту. Введение. Вал — это вращающийся элемент машины, обычно круглого сечения, который используется для передачи мощности от одной части к другой,…
Введение. Вал — это вращающийся элемент машины, обычно круглого сечения, который используется для передачи мощности от одной части к другой,…
07 декабря 2019 06:50 IST
Подробнее Пластина с отверстием с использованием Solidworks
Задача:
Анализ пластины с отверстием Цель: выполнить статический анализ двух разных пластин с отверстиями. Для оценки напряжения, деформации и смещения. Две геометрические модели следующие: **Все размеры указаны в мм. Предварительные условия: Материал — легированная сталь. Тип анализа: Статический структурный 1 из…
02 декабря 2019 г. 11:26 IST
Подробнее
Анализ явлений потери устойчивости с использованием SolidWorks
Цель:
Анализ методом конечных элементов явлений потери устойчивости на стенде циклонного сепаратора с использованием Solidworks Введение ИЗГИБАНИЕ — это нестабильность, которая приводит к потере устойчивости структурный отказ. Виды отказов в простых случаях могут быть найдены с помощью простых математических решений. Для сложных конструкций виды разрушения находятся по числовому…
Виды отказов в простых случаях могут быть найдены с помощью простых математических решений. Для сложных конструкций виды разрушения находятся по числовому…
23 ноя 201923:10 IST
Подробнее
Анализ методом конечных элементов изгиба балок с использованием Solidworks
Цель:
СРАВНЕНИЕ ИЗГИБА РАЗЛИЧНЫХ ТИПОВ БАЛОК ось луча. Его способ отклонения в основном за счет изгиба. Нагрузки, приложенные к балке, вызывают силы реакции в точках опоры балки. Общий эффект всех…
16 нояб. 2019 09:38 IST
Подробнее
Анализ данных/парсинг файла моделирования двигателя с использованием PYTHON
Цель:
АНАЛИЗ ФАЙЛА/АНАЛИЗ ДАННЫХ МОДЕЛИРОВАНИЯ ДВИГАТЕЛЯ Цель: извлечь различные коэффициенты из файла engine_data и написать программу PYTHON для создания Инструмент визуализации данных. Файл ENGINE_DATA выглядит следующим образом. Он содержит 17 параметров в отдельных столбцах, и каждый параметр имеет около 8000 значений. Другие входные данные…
Файл ENGINE_DATA выглядит следующим образом. Он содержит 17 параметров в отдельных столбцах, и каждый параметр имеет около 8000 значений. Другие входные данные…
27 октября 2019 г. 11:29 IST
- PYTHON
Подробнее
Выполнение подбора кривой с помощью PYTHON
Цель:
ПОДБОРКА КРИВОЙ Цель: Написать программу на PYTHON для выполнения подбора кривой Подгонка кривой — это процесс построения кривой или математической функции , который лучше всего соответствует ряду точек данных, возможно, с учетом ограничений. Аппроксимация кривой может включать любую интерполяцию, где точная подгонка…
26 окт. 2019 09:47 IST
- PYTHON
Подробнее
Выполнение генетического алгоритма в MATLAB/OCTAVE и поиск глобальных максимумов сталагмита функции. Генетический алгоритм — это эвристика поиска, вдохновленная теорией естественной эволюции Чарльза Дарвина. «Выживает сильнейший» — принцип теории,…
Генетический алгоритм — это эвристика поиска, вдохновленная теорией естественной эволюции Чарльза Дарвина. «Выживает сильнейший» — принцип теории,…
26 октября 2019 г. 09:43 AM IST
- Алгоритмы
- MATLAB
Читать больше
из файла НАСА .dat и написать программу MATLAB для расчета удельного тепла, энтальпии и энтропии каждого элемента, присутствующего в файле. Извлекаемый файл THERMO.dat выглядит следующим образом: Файл состоит из данных заголовка, которые…
26 окт. 2019 09:43 IST
- MATLAB
Подробнее
Моделирование цикла Ренкина с использованием MATLAB/OCTAVE.
Цель:
МОДЕЛИРОВАНИЕ ЦИКЛА РЕНКИНА Цикл Ренкина — это типичный паровой цикл, который непрерывно преобразует энергию, хранящуюся в топливе, в полезную механическую работу/работу вала и, в конечном счете, в электричество.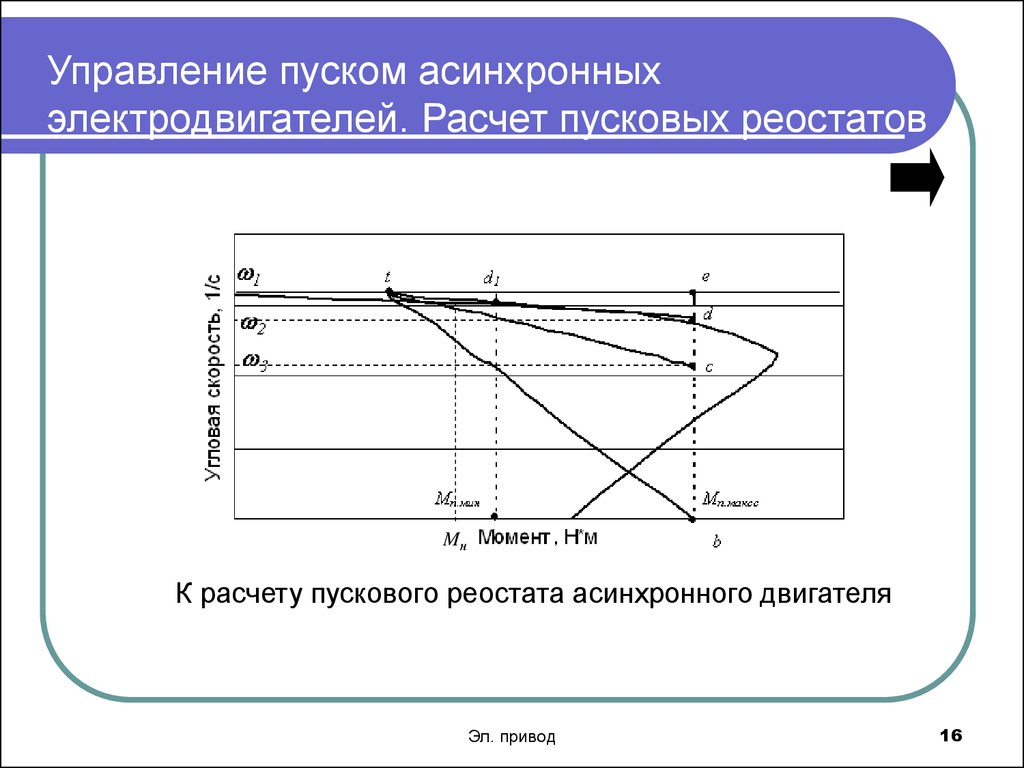 Рабочим телом является вода, которая иногда находится в жидком состоянии, а иногда в парообразном состоянии в течение своего цикла операций.…
Рабочим телом является вода, которая иногда находится в жидком состоянии, а иногда в парообразном состоянии в течение своего цикла операций.…
26 окт. 2019 09:43 IST
Подробнее
Моделирование цикла Отто с использованием PYTHON
Цель:
СТАНДАРТНЫЙ ЦИКЛ ВОЗДУХА: ЦИКЛ ОТТО Цикл Отто обычно используется в термодинамическом цикле двигателя с искровым зажиганием. Автомобили. Типичный цикл Отто состоит из пары изэнтропических процессов, которые являются обратимыми адиабатическими. Пара изохорных процессов, которые являются циклами постоянного объема. Типичный…
26 окт. 2019 09:43 IST
- MATLAB
- PYTHON
Подробнее
Разбивание льда с помощью транспортного средства на воздушной подушке — поиск минимального давления с помощью метода Ньютона-Рафсона в PYTHON Метод Метод Ньютона-Рафсона Метод Ньютона-Рафсона (также известный как метод Ньютона) — это способ быстро найти хорошее приближение для корня функции с действительным знаком f(x) = 0. Он использует идею о том, что непрерывная…
Он использует идею о том, что непрерывная…
26 окт. 2019 09:43 IST
Подробнее
Визуализация цикла ОТТО с помощью MATLAB и расчет его тепловой эффективности в двигателях с искровым зажиганием, обычно встречающихся в автомобилях. Типичный цикл Отто состоит из пары изэнтропических процессов, которые являются обратимыми адиабатическими. Пара изохорных процессов, которые являются циклами постоянного объема. Типичный…
26 окт. 2019 09:43 IST
- MATLAB
Подробнее
Решение второго порядка с использованием PYTHON
Цель:
Переходное поведение неподвижного тела свободно вперед и назад под действием силы тяжести. Когда маятник смещается из своего начального положения, на него действует восстанавливающая сила силы тяжести, которая ускоряет маятник обратно в его…
26 окт. 2019 09:43 IST
2019 09:43 IST
Подробнее
Решение ОДУ второго порядка в октаве
Цель:
Переходное поведение простого маятника влияние гравитации. Когда маятник смещается из исходного положения, на него действует восстанавливающая сила силы тяжести, которая ускоряет маятник обратно в его…
26 окт. 2019 09:43 IST
Подробнее
Подгонка кривой в MATLAB
Цель:
ПОДБОРКА КРИВОЙ Цель: Написать программу MATLAB/OCTAVE для выполнения подгонки кривой Подгонка кривой — это процесс построения кривой или математической функции, которая наилучшим образом соответствует ряд точек данных, возможно, с учетом ограничений. Подгонка кривой может включать любую интерполяцию, где точная…
26 окт.0003
Цель:
R Роботизированная рука – кинематическое движение вперед Здесь 2R обозначает «два вращательных» соединения для двухзвенной кинематической цепи. Рассмотрим длину звена 1, l1=1 ед. длины звена 2, l2=0,5 ед. Чтобы найти рабочую область/конечную позицию указанного выше робота, нам нужно найти положения звена 1…
Рассмотрим длину звена 1, l1=1 ед. длины звена 2, l2=0,5 ед. Чтобы найти рабочую область/конечную позицию указанного выше робота, нам нужно найти положения звена 1…
26 окт. 2019 09 :43 AM IST
Подробнее
Обтекание велосипеда с помощью PYTHON
Цель:
Обтекание велосипеда На велосипедиста при езде на велосипеде влияет несколько факторов, которые определяют скорость и потенциальную энергию, потребляемую велосипедистом. Аэродинамическое исследование показывает, что помимо силы тяги велосипедиста существует противодействующая сила, называемая СИЛА СОПРОТИВЛЕНИЯ, которая, по сути, представляет собой не что иное, как…
26 окт. 2019 09:43 IST
Подробнее
Прямая кинематика 2R робота-манипулятора с использованием PYTHON
Цель:
2R Робот-манипулятор — прямое кинематическое движение для «двух опор» Кинематическая цепь. Рассмотрим длину звена 1, l1=1 ед. длины звена 2, l2=0,5 ед. Чтобы найти рабочее пространство/конечную позицию указанного выше робота, нам нужно найти положения звена 1…
Рассмотрим длину звена 1, l1=1 ед. длины звена 2, l2=0,5 ед. Чтобы найти рабочее пространство/конечную позицию указанного выше робота, нам нужно найти положения звена 1…
26 окт. 2019 09 :43:00 IST
- MATLAB
Подробнее
Обтекание велосипеда с помощью MATLAB
Цель:
Обтекание велосипеда Для велосипедиста при езде на велосипеде влияет несколько факторов, которые определяют скорость и потенциальную энергию, потребляемую велосипедистом. Аэродинамическое исследование показывает, что помимо силы тяги велосипедиста существует противодействующая сила, называемая СИЛОЙ СОПРОТИВЛЕНИЯ, которая по сути представляет собой не что иное, как…
26 Oct 2019 09:43 IST
Подробнее0003
Показан 1 из 41 проекта
Попробуйте наши лучшие инженерные курсы, проекты и семинары уже сегодня! Закажите живую демонстрацию
Характеристики крутящего момента и проскальзывания в трехфазном асинхронном двигателе
Поскольку асинхронный двигатель находится от холостого хода до полного нагрузка, его скорость уменьшается, следовательно, скольжение увеличивается. Из-за увеличенного. нагрузки, двигатель должен создавать больший крутящий момент, чтобы удовлетворить требования нагрузки. Крутящий момент в конечном итоге зависит от скольжения, как объяснялось ранее. О поведении двигателя можно легко судить, нарисовав кривую, полученную путем построения графика зависимости крутящего момента от скольжения асинхронного двигателя. Кривая, полученная путем построения графика зависимости крутящего момента от скольжения от s = 1 (при пуске) до s = 0 (при синхронной скорости), называется характеристикой крутящего момента-скольжения асинхронного двигателя. Очень интересно изучить природу характеристик момент-скольжение.
Из-за увеличенного. нагрузки, двигатель должен создавать больший крутящий момент, чтобы удовлетворить требования нагрузки. Крутящий момент в конечном итоге зависит от скольжения, как объяснялось ранее. О поведении двигателя можно легко судить, нарисовав кривую, полученную путем построения графика зависимости крутящего момента от скольжения асинхронного двигателя. Кривая, полученная путем построения графика зависимости крутящего момента от скольжения от s = 1 (при пуске) до s = 0 (при синхронной скорости), называется характеристикой крутящего момента-скольжения асинхронного двигателя. Очень интересно изучить природу характеристик момент-скольжение.
Мы видели, что при постоянном напряжении питания E 2 также является постоянным. Таким образом, мы можем записать уравнения крутящего момента в виде
. Теперь, чтобы судить о характере характеристик крутящего момента и проскальзывания, давайте разделим диапазон проскальзывания (от s = 0 до s = 1) на две части и проанализируем их независимо.
i) Область малого скольжения:
В области малого скольжения буква «s» очень мала. Благодаря этому член (s X 2 ) 2 такой мал по сравнению с R 2 2 , что им можно пренебречь.
Следовательно, в области низкого скольжения крутящий момент прямо пропорционален скольжению. Так как нагрузка увеличивается, скорость уменьшается, увеличивая скольжение. Это увеличивает крутящий момент, который удовлетворяет требованиям нагрузки.
Следовательно, график имеет прямолинейный характер.
При N = N с , s = 0, следовательно, T = 0. Поскольку при N = N с крутящий момент не создается, двигатель останавливается, если пытается достичь синхронной скорости. Крутящий момент увеличивается линейно в этой области малых значений проскальзывания.
ii) Область высокого скольжения:
В этой области скольжение велико, т.е. значение скольжения приближается к 1. Здесь можно предположить, что член R 2 2 очень мал по сравнению с ( с Х 2 ) 2 . Следовательно, пренебрегая знаменателем, мы получаем
Следовательно, пренебрегая знаменателем, мы получаем
Таким образом, в области высокого скольжения крутящий момент обратно пропорционален скольжению. Следовательно, его природа подобна прямоугольной гиперболе.
Теперь, когда нагрузка увеличивается, потребность в нагрузке увеличивается, но скорость уменьшается. С уменьшением скорости скольжение увеличивается. В области высокого скольжения, как T α1/с, крутящий момент уменьшается по мере увеличения скольжения.
Но крутящий момент должен увеличиться, чтобы удовлетворить потребность в нагрузке. По мере уменьшения крутящего момента из-за эффекта дополнительной нагрузки скорость еще больше снижается, а скольжение еще больше увеличивается. Крутящий момент снова уменьшается как T α1/с, следовательно, та же нагрузка действует как дополнительная нагрузка из-за уменьшения создаваемого крутящего момента. Отсюда скорость еще больше падает. В конце концов двигатель останавливается. Двигатель не может продолжать вращаться в любой точке этой области высокого скольжения. Поэтому эта область называется нестабильной областью действия.
Поэтому эта область называется нестабильной областью действия.
Итак, характеристика крутящего момента – скольжения состоит из двух частей,
1. Прямая называется стабильной областью работы
2. Прямоугольная гипербола называется нестабильной областью работы.
Теперь возникает очевидный вопрос: до какого значения характеристики скольжения, крутящий момент – скольжение представляют стабильную работу?
В области малого скольжения при увеличении нагрузки скольжение увеличивается, и крутящий момент также увеличивается линейно. У каждого двигателя есть свой предел для создания крутящего момента. Максимальный крутящий момент, который двигатель может создать при увеличении нагрузки, составляет T м , что происходит при s = s м . Таким образом, линейное поведение продолжается до s = s m .
Если нагрузка превышает этот предел, проскальзывание двигателя преимущественно толкает двигатель в область высокого скольжения. Из-за нестабильных условий двигатель останавливается при такой нагрузке. Следовательно, максимальный крутящий момент, который может создать двигатель, также называется пробивным крутящим моментом или тяговым крутящим моментом. Таким образом, диапазон от s = 0 до s = s м называется областью малого скольжения, известной как область стабильной работы. Двигатель всегда работает в точке в этой области. И диапазон s = s м до s = 1 называется областью высокого скольжения, которая представляет собой прямоугольную гиперболу, называемую неустойчивой областью работы. Двигатель не может продолжать вращаться в любой точке этой области.
Из-за нестабильных условий двигатель останавливается при такой нагрузке. Следовательно, максимальный крутящий момент, который может создать двигатель, также называется пробивным крутящим моментом или тяговым крутящим моментом. Таким образом, диапазон от s = 0 до s = s м называется областью малого скольжения, известной как область стабильной работы. Двигатель всегда работает в точке в этой области. И диапазон s = s м до s = 1 называется областью высокого скольжения, которая представляет собой прямоугольную гиперболу, называемую неустойчивой областью работы. Двигатель не может продолжать вращаться в любой точке этой области.
При s = 1, N = 0, т. е. при пуске, двигатель создает крутящий момент, называемый пусковым моментом, обозначаемый как T st .
Полная характеристика момент-скольжение показана на рис. 1.
| Рис. 1 Моментно-скоростная характеристика |
1. 1 Крутящий момент при полной нагрузке
1 Крутящий момент при полной нагрузке
При увеличении нагрузки на двигатель создаваемый крутящий момент увеличивается по мере снижения скорости и увеличения скольжения. Потребность в повышенном крутящем моменте удовлетворяется за счет потребления тока двигателя из источника питания.
Нагрузка, при которой двигатель может безопасно работать в непрерывном режиме и из-за такой нагрузки потребляемый ток также находится в безопасных пределах, называется состоянием полной нагрузки двигателя. Когда ток увеличивается, из-за выделяемого тепла повышается температура. Безопасным пределом тока является такой, который при продолжительной работе двигателя вызывает повышение температуры в допустимых пределах. Такая точка полной нагрузки показана на моментной характеристике проскальзывания моментом как T ФЛ .
Интересно, что нагрузка на двигатель может быть увеличена за пределы точки C до состояния максимального крутящего момента. Но из-за большого тока и, следовательно, высокого повышения температуры существует вероятность повреждения изоляции обмотки, если двигатель работает в течение более длительного времени в этой области, то есть из точки C в точку B. Но двигатель можно использовать для привода нагрузок, превышающих полную нагрузку, создание крутящего момента до максимального крутящего момента в течение короткого промежутка времени. Обычно крутящий момент при полной нагрузке меньше максимального крутящего момента.
Но двигатель можно использовать для привода нагрузок, превышающих полную нагрузку, создание крутящего момента до максимального крутящего момента в течение короткого промежутка времени. Обычно крутящий момент при полной нагрузке меньше максимального крутящего момента.
Таким образом, область OC до состояния полной нагрузки позволяет двигателю работать непрерывно и безопасно с точки зрения температуры. В то время как область CB на практике можно получить, но только на короткое время, а не на непрерывную работу двигателя. Это разница между крутящим моментом при полной нагрузке и максимальным или пробивным крутящим моментом. Опрокидывающий момент также называют опрокидывающим моментом.
1.2 Область генерации и торможения
Когда скольжение лежит в области 0 и 1, т.е. когда 0 ≤s ≤1, машина работает как двигатель, что является нормальным режимом работы. Вращение ротора происходит в направлении вращающегося поля, создаваемого токами статора. В этом регионе он получает электроэнергию от линий электропередач и поставляет механическую мощность. Скорость ротора и соответствующий крутящий момент имеют одинаковое направление.
Скорость ротора и соответствующий крутящий момент имеют одинаковое направление.
При скольжении больше 1 машина работает в режиме торможения. Двигатель вращается в направлении, противоположном направлению вращения поля. На практике две клеммы статора меняются местами, что изменяет последовательность фаз, что, в свою очередь, меняет направление вращения магнитного поля на противоположное. Двигатель быстро останавливается под действием противодействующего момента, который создает тормозное действие. Этот метод, с помощью которого двигатель останавливается, известен как заглушка. Принимают меры только к тому, чтобы статор был отключен от источника питания, чтобы ротор не вращался в другом направлении
Для работы асинхронной машины в качестве генератора ее скольжение должно быть меньше нуля, т.е. отрицательно. Отрицательное скольжение указывает на то, что скорость вращения ротора выше синхронной. При работе в качестве генератора он потребляет механическую энергию и подает электрическую энергию от статора.
 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
 е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.



 Электростанции, робототехника, фабрики и многое другое использовали электродвигатели, чтобы полностью изменить темпы развития промышленности. Эти двигатели преобразуют электрический ток во вращательное движение, и в этой статье мы рассмотрим, как эта задача решается с помощью асинхронных двигателей. Эти двигатели представляют собой класс двигателей переменного тока, которые реализуют эффект электромагнитной индукции для создания вращательной энергии. Эти двигатели представляют собой мощные машины, которые доминируют в промышленном мире благодаря своей простой, но эффективной конструкции. В этой статье будут описаны функции, технические характеристики и области применения асинхронных двигателей, а также предложено, как выбрать лучший тип асинхронного двигателя для вашего проекта.
Электростанции, робототехника, фабрики и многое другое использовали электродвигатели, чтобы полностью изменить темпы развития промышленности. Эти двигатели преобразуют электрический ток во вращательное движение, и в этой статье мы рассмотрим, как эта задача решается с помощью асинхронных двигателей. Эти двигатели представляют собой класс двигателей переменного тока, которые реализуют эффект электромагнитной индукции для создания вращательной энергии. Эти двигатели представляют собой мощные машины, которые доминируют в промышленном мире благодаря своей простой, но эффективной конструкции. В этой статье будут описаны функции, технические характеристики и области применения асинхронных двигателей, а также предложено, как выбрать лучший тип асинхронного двигателя для вашего проекта. Это бесценный показатель, конечная цель которого — создать столько механической энергии, сколько необходимо для текущей работы.
Это бесценный показатель, конечная цель которого — создать столько механической энергии, сколько необходимо для текущей работы. Этот крутящий момент необходимо понимать, если какой-то максимальный крутящий момент нельзя превзойти.
Этот крутящий момент необходимо понимать, если какой-то максимальный крутящий момент нельзя превзойти. В большинстве бытовых приборов используются асинхронные двигатели, хотя они, как правило, однофазные из соображений экономичности. Трехфазные асинхронные двигатели в основном используются в механизации и бывают двух основных разновидностей: двигатели с короткозамкнутым ротором и двигатели с фазным ротором (дополнительную информацию можно найти в наших статьях о двигателях с короткозамкнутым ротором и двигателях с фазным ротором).
В большинстве бытовых приборов используются асинхронные двигатели, хотя они, как правило, однофазные из соображений экономичности. Трехфазные асинхронные двигатели в основном используются в механизации и бывают двух основных разновидностей: двигатели с короткозамкнутым ротором и двигатели с фазным ротором (дополнительную информацию можно найти в наших статьях о двигателях с короткозамкнутым ротором и двигателях с фазным ротором). Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
 например в перфораторном или возвратно-поступательном насосе, где скольжение может варьироваться от 0 до 0,50 Значительно менее эффективен, чем другие конструкции
например в перфораторном или возвратно-поступательном насосе, где скольжение может варьироваться от 0 до 0,50 Значительно менее эффективен, чем другие конструкции
 Ламинированные стали можно купить разных марок,
Ламинированные стали можно купить разных марок, Кроме того, если более тонкие пластины
Кроме того, если более тонкие пластины
 С появлением нерегулируемых рынков и возможностью
С появлением нерегулируемых рынков и возможностью
 В целях
В целях
 например все двигатели мощностью 5 л.с. будут иметь одинаковый физический размер и форму, и в случае
например все двигатели мощностью 5 л.с. будут иметь одинаковый физический размер и форму, и в случае
