

Содержание
ВКР версия 5.0.Релиз (Автоматизация системы электроприводов козлового крана типа КДКК-10) — документ (229168)
Файл «ВКР версия 5.0.Релиз» внутри архива находится в следующих папках: Автоматизация системы электроприводов козлового крана типа КДКК-10, Бессонов ВКР 648 гр 2017. Документ из архива «Автоматизация системы электроприводов козлового крана типа КДКК-10»,
который расположен в категории «».
Всё это находится в предмете «дипломы и вкр» из 8 семестр, которые можно найти в файловом архиве ДВГУПС.
Не смотря на прямую связь этого архива с ДВГУПС, его также можно найти и в других разделах. .
Министерство транспорта Российской Федерации
Федеральное агентство железнодорожного транспорта
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«ДАЛЬНЕВОСТОЧНЫЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Электротехника, электроника и электромеханика»
К ЗАЩИТЕ ДОПУСТИТЬ |
Зав. |
_____________ О.А.Малышева |
«____»___________20 г. |
 кафедрой
кафедройАВТОМАТИЗАЦИЯ СИСТЕМЫ ЭЛЕКТРОПРИВОДОВ КОЗЛОВОГО КРАНА КДКК-10 |
Пояснительная записка к выпускной квалификационной работе |
БР 13.03.02 ПЗ – 648 |
Студент | А.С. Бессонов |
Руководитель | Р.Х. Сайфутдинов |
Нормоконтроль | А.И. Моисеева |
Хабаровск – 2017
ABSTRACT
In this thesis work is the development of automatic control electric double-cantilever gantry crane KDKK-10, 10 ton lifting capacity. During the work produced a study of the technical data is edge-on, the principle of its work, the study of relay-contact control circuit tap revealed its shortcomings.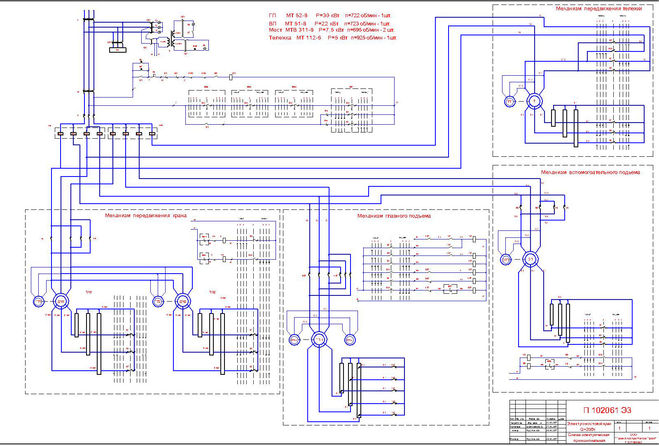 We developed a technical solution with application of frequency speed control of motors and the microprocessor control logic. The calculation and selection of necessary equipment, and also designed an electric circuit connections to the equipment.
We developed a technical solution with application of frequency speed control of motors and the microprocessor control logic. The calculation and selection of necessary equipment, and also designed an electric circuit connections to the equipment.
РЕФЕРАТ
Работа содержит 121 с., 23 рис., 42 табл., 7 источников, 3 прил.
ГРУЗОПОДЪЕМНОСТЬ, РАБОЧИЕ МЕХАНИЗМЫ, БЕЗОПАСНОСТЬ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ, ЧАСТОТНОЕ УПРАВЛЕНИЕ ПРИВОДОМ, СТРУКТУРНАЯ СХЕМА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ, ПОДБОР ОБОРУДОВАНИЯ, ЭЛЕКТРИЧЕСКИЕ СХЕМЫ ПОДКЛЮЧЕНИЯ ЭЛЕКТРООБОРУДОВАНИЯ, ПРОГРАММА ДЛЯ ПЛК И СЕНСОРНОЙ ПАНЕЛИ.
Целью дипломного проекта является разработка автоматизированной системы управления электроприводами козлового двухконсольного крана КДКК-10, грузоподъемностью 10 тонн, расположенного на путевой машинной станции 186, пос. Корфовский.
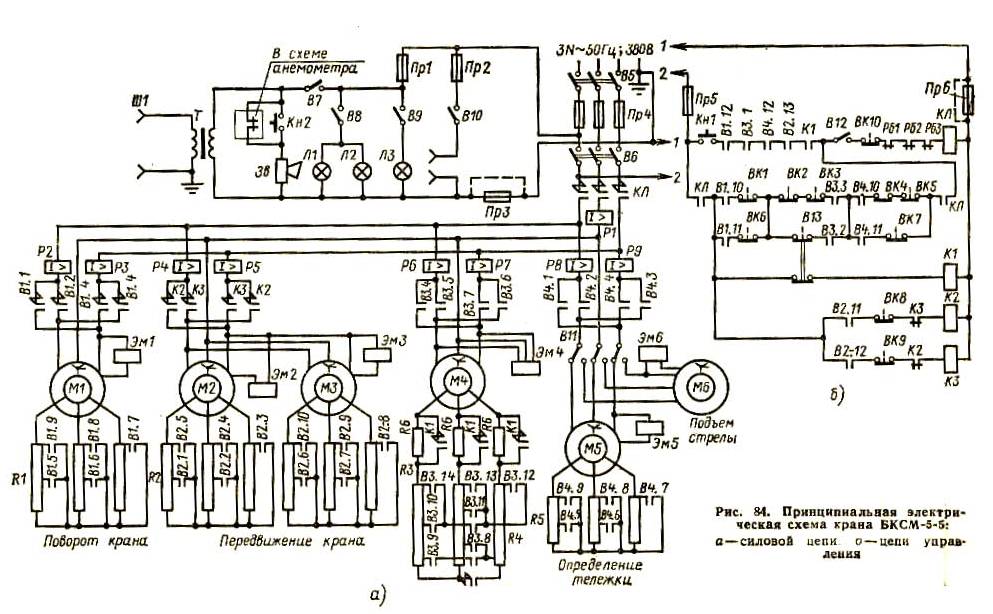
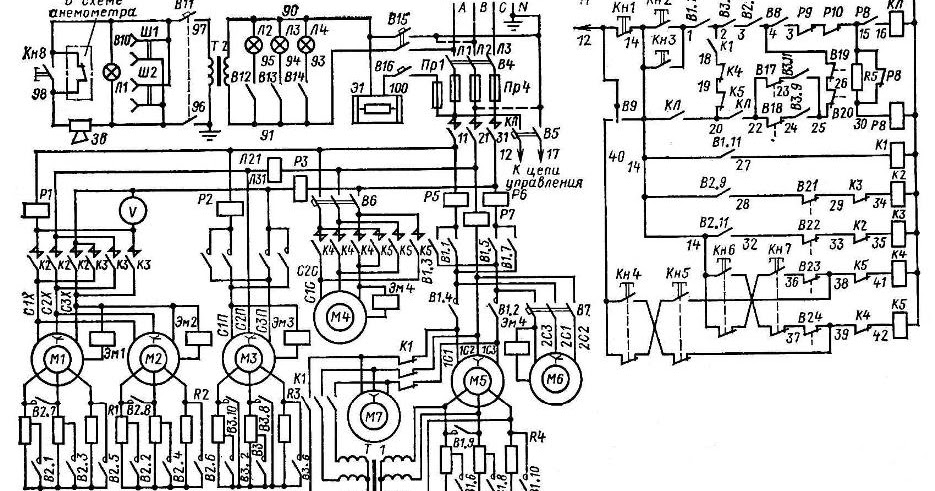
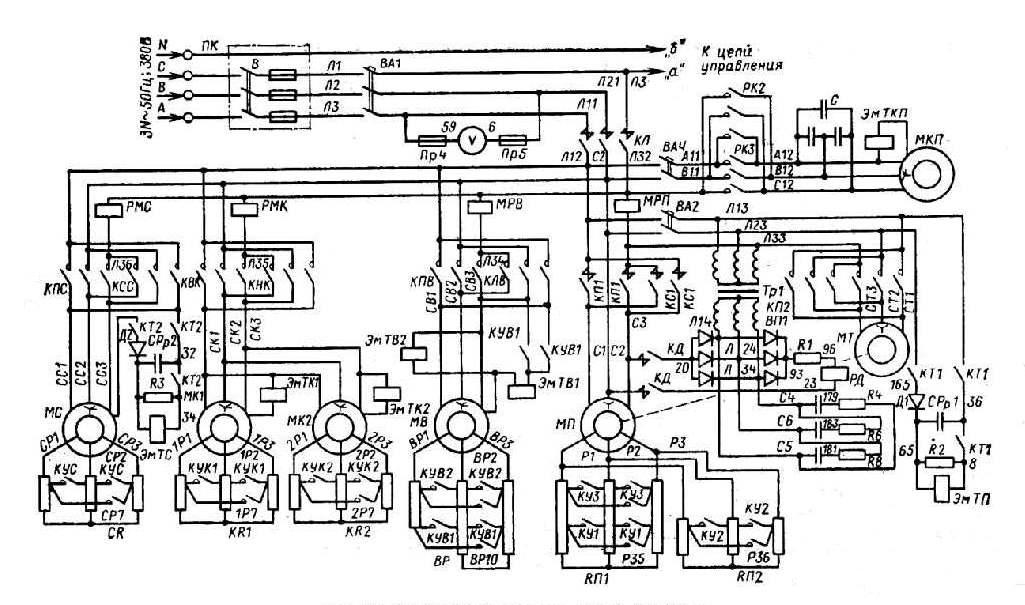
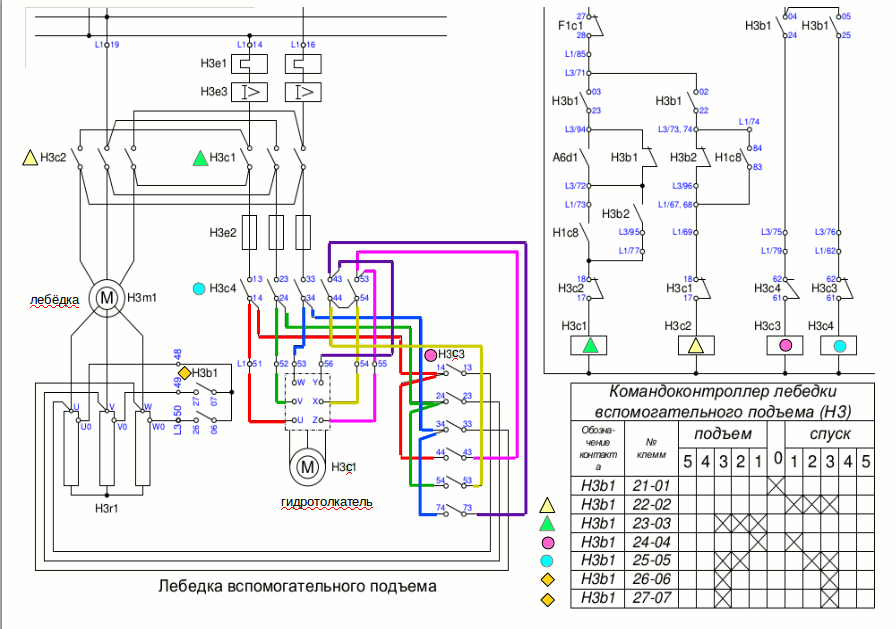
Общая часть дипломного проекта содержит технические данные объекта автоматизации. Описан технологический процесс погрузочно-разгрузочных работ.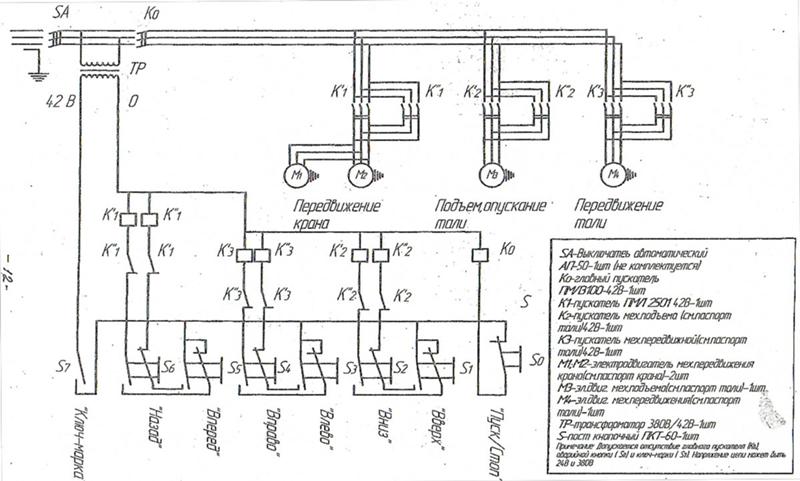 Изложено описание электрической схемы крана с управлением на релейно-контактной логике. Приведен анализ недостатков имеющейся электрической схемы. Рассмотрены положительные стороны применения частотного управления приводами для объекта автоматизации. Проведен анализ входных и выходных параметром системы, на основании чего составлена структурная схема автоматизированной системы управления с применением промышленного логического контроллера (ПЛК), частотного управления и человеко-машинного интерфейса. Изложено описание структурной схемы.
Изложено описание электрической схемы крана с управлением на релейно-контактной логике. Приведен анализ недостатков имеющейся электрической схемы. Рассмотрены положительные стороны применения частотного управления приводами для объекта автоматизации. Проведен анализ входных и выходных параметром системы, на основании чего составлена структурная схема автоматизированной системы управления с применением промышленного логического контроллера (ПЛК), частотного управления и человеко-машинного интерфейса. Изложено описание структурной схемы.
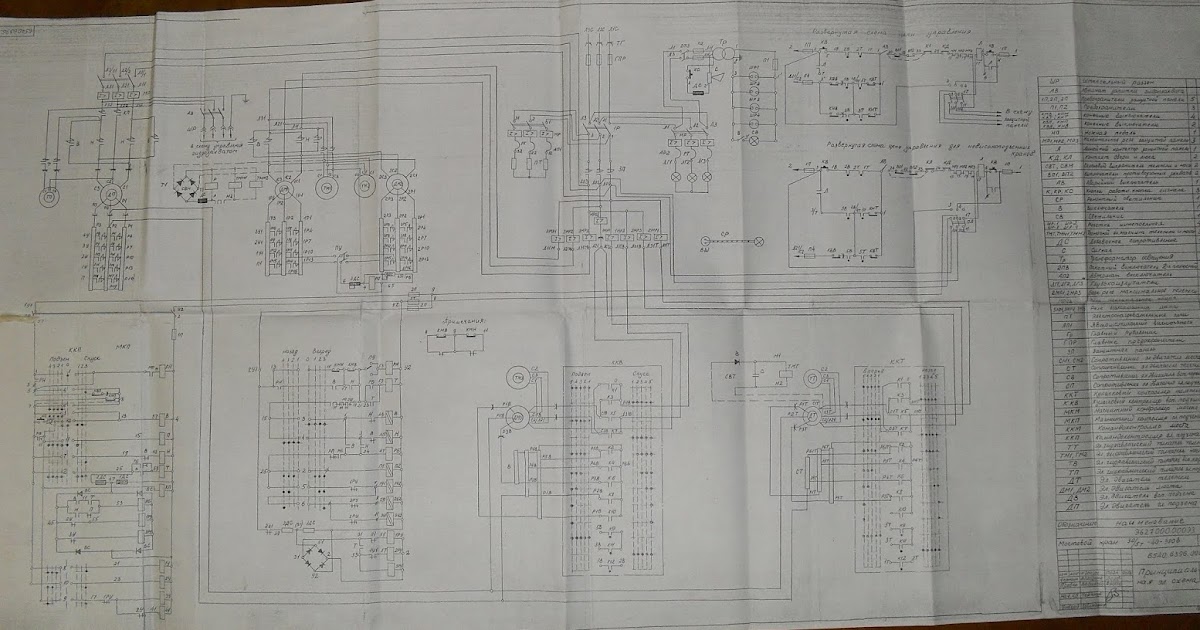
Специальная часть дипломной работы содержит расчеты и подбор электрооборудования и средств автоматизации. Разработаны принципиальные электрические схемы силовой цепи и цепи управления. Разработаны программы для ПЛК и сенсорной панели.
ВВЕДЕНИЕ 9
1 СВЕДЕНИЯ ОБ ОБЪЕКТЕ АВТОМАТИЗАЦИИ 11
2 ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА 14
3 СХЕМА УПРАВЛЕНИЯ КРАНОМ 18
3.1 Описание схемы управления 18
3.2 Недостатки схемы управления 21
3. 3 Частотное управление электроприводом 24
3 Частотное управление электроприводом 24
4 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ (АСУ) КРАНОМ С ЧАСТОТНЫМ ПРИВОДОМ 29
4.1 Общие сведения 29
4.2 Входные параметры системы 29
4.3 Выходные параметры системы 31
4.4 Описание структурной схемы АСУ 33
5 РАСЧЕТ И ПОДБОР ОБОРУДОВАНИЯ 38
5.1 Подбор электродвигателей с короткозамкнутым ротором 38
5.2 Подбор ПЛК 40
5.2.1 Общие сведения 40
5.2.2 Выбор модуля центрального процессора 41
5.2.3 Выбор модулей входных сигналов 42
5.2.4 Выбор модулей выходных сигналов 46
5.2.5 Выбор модуля питания 48
5.2.6 Выбор монтажного шасси 50
5.3 Подбор преобразователей частоты 51
5.4 Расчет и подбор автоматических выключателей 58
5.4.1 Общие сведения 58
5.4.2 Выбор автоматического выключателя для защиты двигателя привода подъема груза 59
5.4.3 Выбор автоматического выключателя для защиты двигателя привода передвижения грузовой тележки 61
5. 4.4 Выбор автоматического выключателя для защиты электродвигателей привода крана по подкрановым путям 63
4.4 Выбор автоматического выключателя для защиты электродвигателей привода крана по подкрановым путям 63
5.4.5 Выбор автоматического выключателя для защиты электромагнитного тормоза 65
5.4.6 Выбор автоматического выключателя для защиты линии 67
5.5 Подбор контакторов 68
5.6 Подбор управляющих кнопок и координатных переключателей 71
5.7 Подбор датчика температуры 72
5.8 Подбор датчика ветра 73
5.9 Подбор датчика массы груза 74
5.10 Подбор концевых выключателей 77
5.11 Подбор устройств сигнализации 78
5.12 Подбор устройства графического отображения информации 79
5.13 Подбор дополнительного оборудования 83
5.14 Подбор сечений кабелей и проводников 85
5.15 Подбор электромонтажного шкафа 87
5.16 Подбор обогревателя для шкафа управления 89
6 РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ СХЕМЫ 93
7 РАЗРАБОТКА ПРОГРАММЫ ДЛЯ ПЛК 95
8 РАЗРАБОТКА ПРОГРАММЫ ДЛЯ СЕНСОРНОЙ ПАНЕЛИ 97
ЗАКЛЮЧЕНИЕ 98
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 100
СПИСОК ИСПОЛЬЗОВАННЫХ СОКРАЩЕНИЙ 101
ПРИЛОЖЕНИЕ А 102
ПРИЛОЖЕНИЕ Б 104
ПРИЛОЖЕНИЕ В 107
Целью данной выпускной квалификационной работы (ВКР) является разработка системы автоматизированного управления группой электроприводов козлового двухконсольного крана КДКК-10.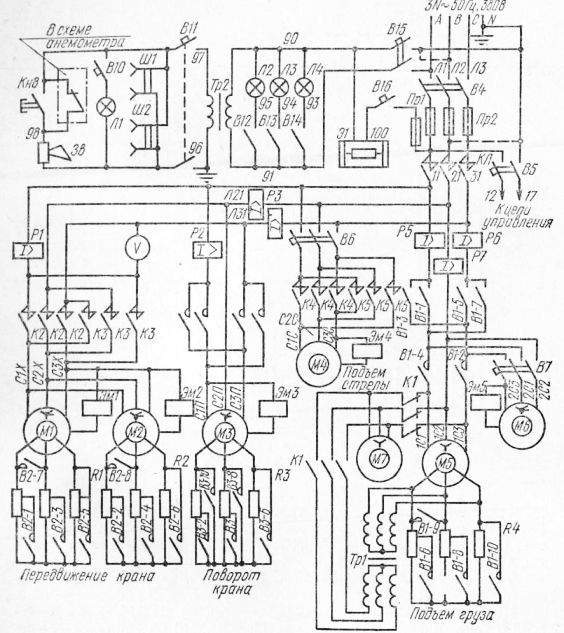 Принцип автоматизации кранов, как козловых, так и кранов других типов, заключается в переходе от схемы управления приводами крана с релейно-контактной логикой к схеме управления, основанной на микропроцессорной логике. Основой микропроцессорной логики является промышленный логический контроллер (ПЛК). Достоинства ПЛК заключаются в том, что он позволяет упростить построение систем управления различными технологическими процессами (ТП), упростить контроль параметров ТП, быстро и своевременно реагировать на неправильное поведение системы, а также реализовывать сложнейшие алгоритмы контроля и управления, которые не возможно реализовать посредством релейно-контактных схем. Кроме того, благодаря взаимодействию ПЛК с человеко-машинным интерфейсом операторы ТП могут динамично менять режимы работы системы автоматизации и взаимодействовать, как с отдельными элементами системы, так и со всей системой в целом, при этом находясь в одном месте.
Принцип автоматизации кранов, как козловых, так и кранов других типов, заключается в переходе от схемы управления приводами крана с релейно-контактной логикой к схеме управления, основанной на микропроцессорной логике. Основой микропроцессорной логики является промышленный логический контроллер (ПЛК). Достоинства ПЛК заключаются в том, что он позволяет упростить построение систем управления различными технологическими процессами (ТП), упростить контроль параметров ТП, быстро и своевременно реагировать на неправильное поведение системы, а также реализовывать сложнейшие алгоритмы контроля и управления, которые не возможно реализовать посредством релейно-контактных схем. Кроме того, благодаря взаимодействию ПЛК с человеко-машинным интерфейсом операторы ТП могут динамично менять режимы работы системы автоматизации и взаимодействовать, как с отдельными элементами системы, так и со всей системой в целом, при этом находясь в одном месте.
Автоматизация кранов позволяет снизить операционные затраты на их содержание за счет ухода от контакторов в цепях роторов двигателей, а также уменьшения контактов в цепи управления; обеспечить плавность перемещения грузов, за счет чего снижаются динамические нагрузки на подъемно-транспортное оборудование; упростить схему управления. За счет этого повышается эффективность работы крана.
За счет этого повышается эффективность работы крана.
Автоматизация кранов является актуальной на сегодняшний день задачей, так как кран- это распространенная абсолютно во всех отраслях промышленности и очень часто используемая машина и поэтому, чем больше будет эффективность работы машины, тем больше прибыли она будет приносить предприятию.
Устройство кранов достаточно сложное, соответственно процесс автоматизации крана также является сложным. Перед началом разработки системы автоматизированного управления, необходимо изучить устройство крана, принципы его работы, а также уделить немалое внимание безопасности, касающейся работы крана. Следует руководствоваться такими нормативно-техническими документами, как ПБ 10-382-00 «Правила устройства и безопасной эксплуатации грузоподъемных кранов» и ГОСТ 12.2.003-91 «Оборудование производственное. Общие требования безопасности». Кроме того разрабатывать систему автоматизированного управления следует согласно ГОСТ 34.601-90 «Автоматизированные системы. Стадии создания» и ГОСТ 24.104-85 «Автоматизированные системы управления. Общие требования».
Стадии создания» и ГОСТ 24.104-85 «Автоматизированные системы управления. Общие требования».
Система автоматизированного управления краном представляет собой 3-х уровневую структуру. 1-й уровень – полевой, к нему относятся датчики и исполнительные устройства, которые непосредственно взаимодействуют с объектом; 2-й уровень – управление технологическим процессом, к нему относится ПЛК; 3-й уровень – контроль технологического процесса, к нему относятся средства человеко-машинного интерфейса, посредством которых оператор взаимодействует с системой.
Объектом автоматизации является козловой двухконсольный кран КДКК–10, расположенный на путевой машинной станции 186, пос. Корфовский, Хабаровский край. Общий вид крана приведен на рисунке А.1, приложения А. Технические данные крана КДКК-10 приведены в табл. 1.1. Технические данные электродвигателей, используемых в качестве приводов рабочих механизмов крана, приведены в табл. 1.2.
Таблица 1.1 — Технические характеристики крана КДКК-10
Параметры | Ед. | Значение параметров |
Грузоподъемность | т | 10.0 |
Пролет моста | м | 16.0 |
Рабочий вылет консоли | м | 4.2 |
База крана | м | 7.0 |
Высота подъема груза | м | 10.0 |
Максимальная скорость подъема груза | м/мин | 10.0 |
Максимальная скорость передвижения тележки | м/мин | 38.0 |
Максимальная скорость передвижения крана | м/мин | 90.0 |
Установленная мощность всех электродвигателей | кВт | 54.2 |
Масса крана | т | 46. |
Рабочий диапазон температур | °С | -40….+40 |
Допустимая ветровая нагрузка | м/с | * |
 изм.
изм.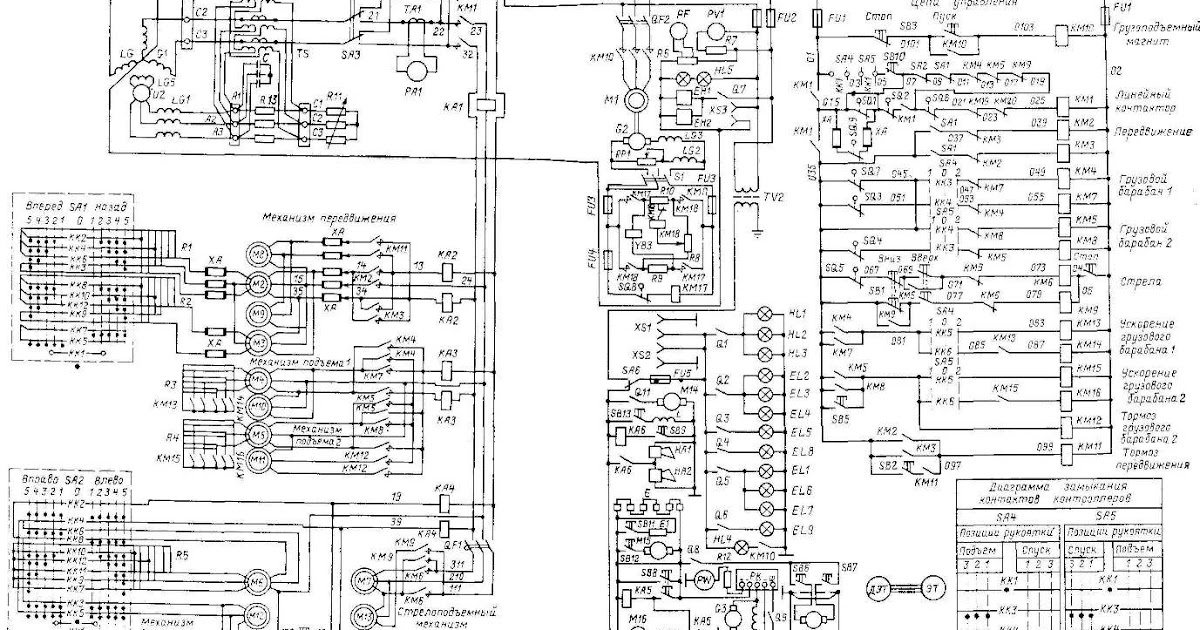 0
0*Согласно пункту 6, табл. 3 по ГОСТ 1451-77 «Краны грузоподъемные. Нагрузка ветровая. Нормы и метод определения» для данного типа кранов (козловой консольный) максимальная допустимая скорость ветра во время работы крана составляет 14 м/с.
Таблица 1.2 — Технические данные электродвигателей
Параметр | Значение параметра |
Привод подъема груза, количество: 1 шт. | |
Наименование | МТН-412-8 |
Мощность, кВт | 22 |
Частота вращения, об/мин | 715 |
Номинальный ток при 380 В, А | 58 |
Напряжение между кольцами, В | 248 |
Кратность максимального момента | 3 |
Кратность пускового тока | 5. |
К.П.Д., % | 83 |
Коэффициент мощности | 0.7 |
Момент инерции, кгм2 | 0.63 |
Привод перемещения тележки, количество: 1 шт. | |
Наименование | МТ-012-6 |
Мощность, кВт | 2.2 |
Частота вращения, об/мин | 908 |
Номинальный ток при 380 В, А | 6.1 |
Напряжение между кольцами, В | 144 |
Кратность максимального момента | 2.3 |
Кратность пускового тока | 4 |
К.П.Д., % | 73 |
 5
5Продолжение таблицы 1.2
Параметр | Значение параметра |
Привод перемещения тележки, количество: 1 шт. | |
Коэффициент мощности | 0.76 |
Момент инерции, кгм2 | 0.026 |
Привод перемещения крана по подкрановым путям, количество: 4 шт. | |
Наименование | МТ-211-6 |
Мощность, кВт | 7.5 |
Частота вращения, об/мин | 940 |
Номинальный ток при 380 В, А | 18.1 |
Напряжение между кольцами, В | 185 |
Кратность максимального момента | 3.3 |
Кратность пускового тока | 4.5 |
К.П.Д., % | 78.5 |
Коэффициент мощности | 0.8 |
Момент инерции, кгм2 | 0.076 |
Питание крана осуществляется по троллейной линии, напряжением 380 В, с частотой питающей сети 50 Гц.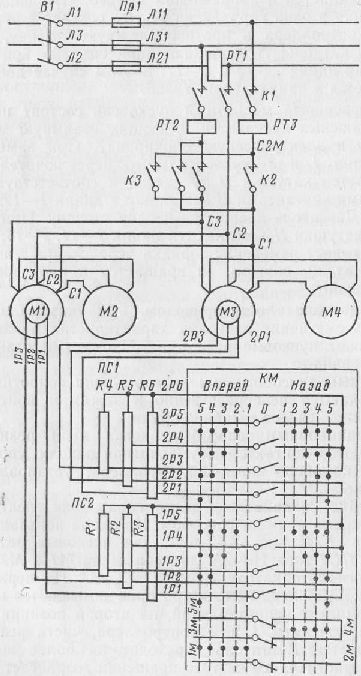
ПромГидроЭнергоМаш
ПромГидроЭнергоМаш
В настоящее время разработкой рабочей конструкторской документации на грузоподъемное оборудование и гидромеханическое оборудование в компании занимается собственный коллектив конструкторов состоящих из выходцев ведущих Российских Институтов — МТТУ им. Баумана, МГТУ МАДИ, МГАВТ, и.д.р.. Ведущие конструктора по грузоподъемному оборудованию начинали свой трудовой путь в ведущей организации по проектированию грузоподъемного оборудования ВНИИПТММАШ.
Разработка рабочей конструкторской документации ведётся с помощью специализированной CAD программы PTC Creo Parametric. Управление жизненным циклом изделия выполняется в PDМ системе PTC Windchill . Расчеты механизмов выполняются конструкторами в инженерном математическом программном обеспечении PTC Mathcad. Расчёты силовых конструкций грузоподъемного оборудования выполняются в специализированном расчетном пакете PTC Creo simulate методом конечных элементов. Документация на электрооборудование выполняется в специализированной программе EPlan.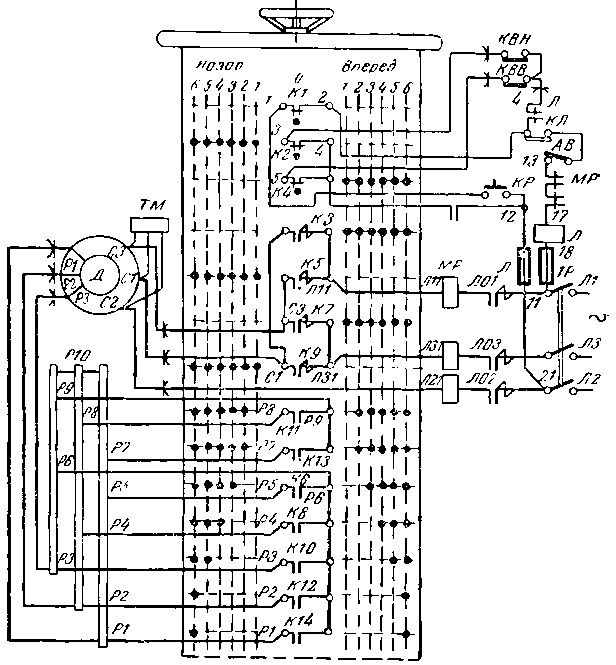 Применение современных конструкторских программ позволяет проектировать грузоподъемное оборудование в кратчайшие сроки, при высоком качестве конструкторской документации. Рабочая конструкторская документация выполняется в строгом соответствии с ГОСТ 2.106 ЕСКД.
Применение современных конструкторских программ позволяет проектировать грузоподъемное оборудование в кратчайшие сроки, при высоком качестве конструкторской документации. Рабочая конструкторская документация выполняется в строгом соответствии с ГОСТ 2.106 ЕСКД.
Минимальный комплект рабочей конструкторской документации включает:
- Спецификации
- Рабочие чертежи сборочные и деталей
- Схемы электрические принципиальные, подключения и д.р
- Схемы кинематические
- Чертежи монтажные
- Ведомости покупных изделий
- Ведомости запасных частей и принадлежностей
- Расчеты механизмов, металлоконструкций на прочность и сейсмостойкость (при необходимости)
- Эксплуатационные документы
- Бланки паспортов на оборудование
- Руководство по эксплуатации и монтажу
- Программа и методика испытаний
За последние несколько лет коллективом конструкторов были разработано следующее грузоподъемное оборудование:
- Кран мостовой г/п 500т Зарамагская ГЭС-1
- Кран козловой г/п 100+100+2х63/2х10+10т Нижне-Бурейская ГЭС
- Кран козловой г/п 100+100+2х63/2х10+16т Нижне-Бурейская ГЭС
- Кран козловой г/п 63т Саяно-Шушенская ГЭС
- Кран мостовой г/п 63/12,5т МГЭС Зарагижская
- Кран козловой г/п 2х125/20/2х7,5т Жигулевская ГЭС
- Кран козловой г/п 2х125/2х25/2х12,5/10/1т Жигулевская ГЭС
- Краны мостовые г/п от 16т до 100т ЕВРАЗ НТМК
- Краны мостовые г/п от 5 до 10т АО «НПК УралВагонЗавод»
- Решеткоочистная машина для ТЭС Лонг-Фу
- Канатный механизм 2х100т ГЭС Гацатлинская
Конструкторский коллектив компании не специализируется только лишь на стандартном грузоподъёмном оборудовании но и занимается любым нестандартным оборудованием для различных сфер деятельности.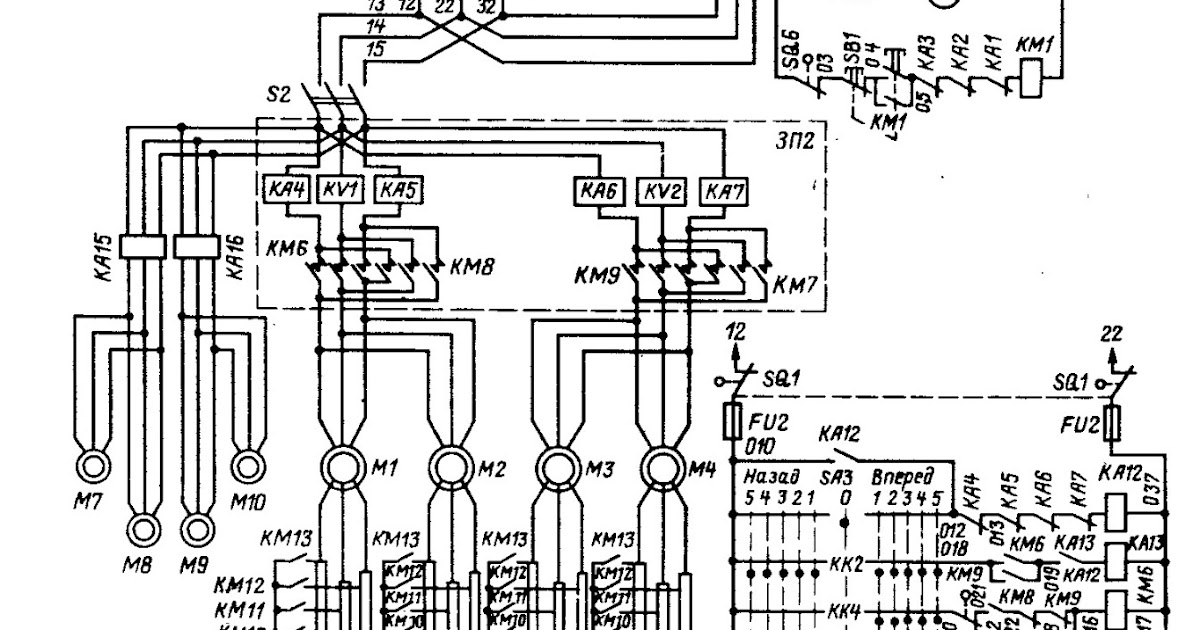 Ярким примером такого оборудования является разработанный в 2014г Комплекс монтажно-подъемной платформы для гидролаборатории НИИ ЦПК им. А.Ю Гагарина.
Ярким примером такого оборудования является разработанный в 2014г Комплекс монтажно-подъемной платформы для гидролаборатории НИИ ЦПК им. А.Ю Гагарина.
Рисунок 1 Кран мостовой 16т
Рисунок 2 кран мостовй 20/5
Рисунок 3 Кран 30/5т
Рисунок 4 Кран козловой г/п 2х125/20/2х7,5т
Рисунок 5 Решеткоочистная машина
Рисунок 6 Расчет металлоконструкции крана методом конечных элементов
Рисунок 7 Расчет металлоконструкции крана методом конечных элементов
Рисунок 8 Пример чертежа
Отправить сообщение
Электрическая схема управления подъемным электромагнитом мостовых кранов с верхним ходовым подъемником
Когда необходимость удобно поднимать и поднимать тяжелые железные или стальные предметы для перемещения с одного места на другое рассматривалась как необходимость на объектах тяжелой промышленности, концепция использования электромагнита была реализована благодаря его способности включать и выключать, что затем был эффективно включен в функцию подъема мостовых кранов.
Магниты мостового крана представляют собой электромагнитное устройство, прикрепленное к крюку крана для магнитного захвата тяжелых металлических грузов при подъеме и перемещении. Краны, оснащенные подъемным магнитом, снабжены цепью управления электромагнитом.
Схема управления электромагнитом разработана с переключателем команд оператора, который может включать и выключать магнит. Электрическая система управляется электронной схемой, сконструированной таким образом, что когда магнит включается для подъема предметов, он мгновенно возбуждает магнит, подавая электрический ток для создания магнитного поля с достаточной силой, чтобы поднимать тяжелые предметы за счет магнитного притяжения к металлу. поверхности объекта, а также освобождать объект после перемещения его на месте в определенное место путем отключения магнита.
На рис. 1 ниже представлено художественное исполнение (это, кстати, мое) типичного мостового крана с тележкой с верхним ходом, оснащенной электромагнитом, подвешенным на крюке.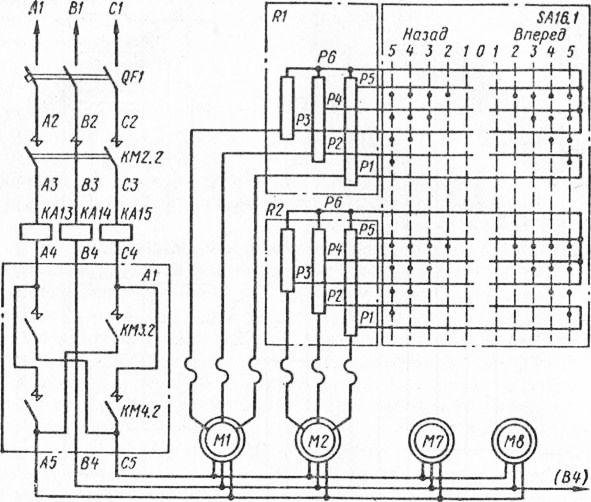
| Рис. 1: Типичный мостовой кран с тележкой с верхним ходом, оснащенной электромагнитом, подвешенным на крюке. |
Хотя электрическая схема управления использует мощность переменного тока, преобразованную в мощность постоянного тока, которая отвечает за подачу электрического тока на катушку электромагнита, электрическая система магнита также должна поддерживаться системой автоматического переключения, которая может немедленно переключиться на резервную батарею. режим с аккумуляторной батареей постоянного тока, это сделано в целях безопасности, чтобы предотвратить случайное падение тяжелых металлических грузов, когда они подвешены в воздухе на полпути процесса подъема, в случае внезапного отключения питания от сети переменного тока во время сбоев в электросети, а также безопасно справляться со случаями прерывистых колебаний мощности переменного тока.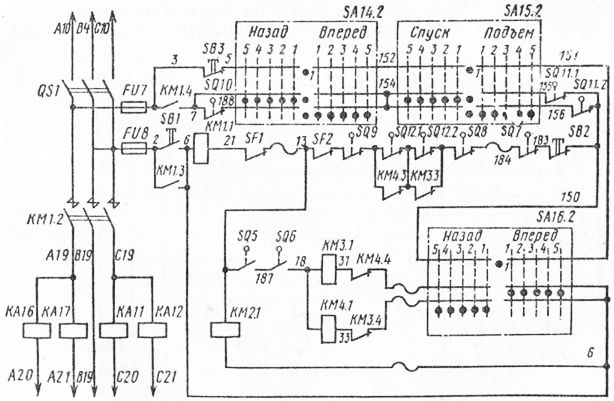
В цепь управления электромагнита также должно быть включено зарядное устройство для обеспечения постоянного поддержания требуемого уровня заряда батареи. Зарядное устройство должно быть способно определять уровень истощения заряда батареи и автоматически заряжать для ее пополнения, чтобы в любое время было эффективно доступно достаточное количество электроэнергии, чтобы можно было ожидать бесперебойного питания от батареи для эффективной работы электромагнита.
Схематическая диаграмма на рисунке 2 ниже показывает пример концептуальной электронной схемы, предназначенной для типичного электромагнита, используемого для функции подъема мостовых кранов.
| Рисунок 2: Принципиальная электрическая схема, предназначенная для иллюстрации электрической системы управления типичным электромагнитом для функции подъема мостовых кранов. |
Как упоминалось ранее, приведенная выше диаграмма показывает, что батарея служит только в качестве резервного устройства и большую часть времени простаивает, пока в цепи активен источник питания переменного тока. Постоянная мощность постоянного тока поступает от преобразованного постоянного напряжения выпрямителя. Включение переключателя активирует два транзистора Q1 и Q2, которые соединены вместе параллельно, чтобы выдерживать достаточное количество электрического тока, протекающего через коллектор к эмиттеру этих двух транзисторов, чтобы подавать достаточное количество энергии на катушку. электромагнит.
Постоянная мощность постоянного тока поступает от преобразованного постоянного напряжения выпрямителя. Включение переключателя активирует два транзистора Q1 и Q2, которые соединены вместе параллельно, чтобы выдерживать достаточное количество электрического тока, протекающего через коллектор к эмиттеру этих двух транзисторов, чтобы подавать достаточное количество энергии на катушку. электромагнит.
Диод, включенный последовательно с батареей, служит в качестве пути с односторонним направлением, который блокирует протекание тока в противоположном направлении от клеммы P выпрямителя, поскольку напряжение, поступающее от выпрямителя, более положительное, чем клемме B+ батареи, тогда диод в таком состоянии смещен в обратном направлении. Когда напряжение питания от источника переменного тока отключено, положительная сторона (клемма B+) батареи может свободно течь через прямое направление диода, который теперь смещен в прямом направлении, чтобы служить заменой положительного напряжения для подачи питания на катушку электромагнита через транзисторы Q1 и Q2, вместо пропавшего положительного напряжения с выпрямителя при отсутствии напряжения источника переменного тока.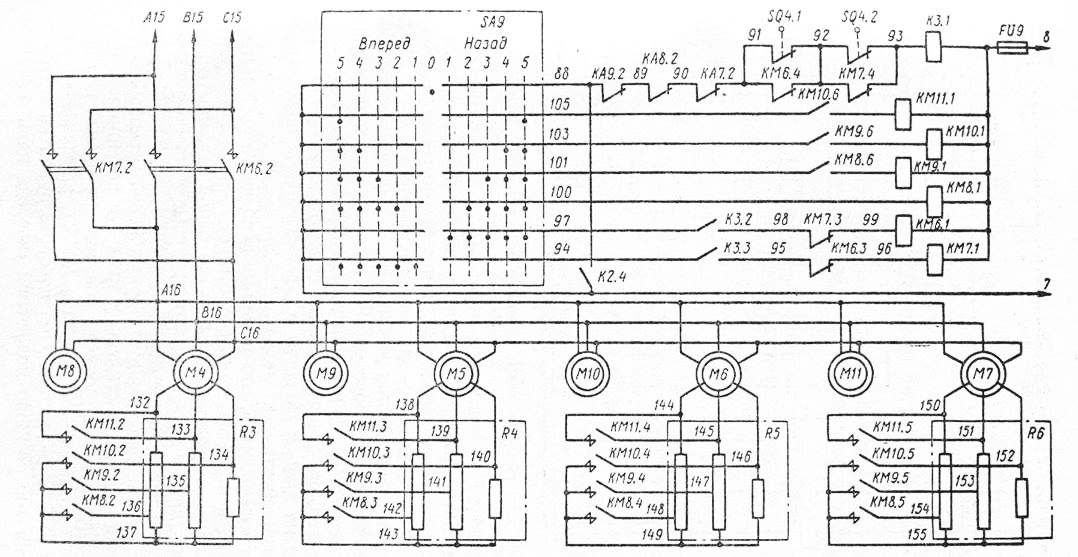
Клемма B+ между диодом и положительной пластиной аккумулятора подключена к цепи зарядного устройства, расположенной в нижней части электронной схемы. Схема зарядного устройства состоит из ОУ (операционного усилителя), который усиливает сигнал от опорного напряжения, заданного переменным резистором (потенциометром) VR1. Стабилитрон, подключенный к VR1, предназначен для фиксации фиксированного опорного напряжения для защиты ОУ первого каскада от ненужного повышения напряжения на входе ОУ первого каскада.
Высокий входной сигнал от VR1 инвертируется в низкий выходной сигнал в первом каскаде операционного усилителя, который далее поступает в виде низкого уровня на вход второго каскада операционного усилителя, где он снова инвертируется в виде высокого выходного сигнала, поступающего на базу транзистора Q3, который, в свою очередь, активирует транзистор Q3 для подачи высокого входного сигнала на базу транзистора Q5. Это включает транзистор Q5, так что его положительное напряжение коллектора P, поступающее от клеммы P выпрямителя, может течь вниз к эмиттеру транзистора Q5, подавая положительное напряжение на батарею, тем самым заряжая батарею.
Транзистор Q4 служит в качестве компаратора, а также в качестве обратной связи, которая определяет уровень напряжения от батареи, который можно отрегулировать и установить с опорным напряжением от переменного резистора (потенциометра) VR2. Когда на базе транзистора Q4 обнаруживается заданный уровень напряжения обратной связи от VR2, он переключает Q4 в состояние ВКЛ, чтобы понизить высокий входной сигнал, предположительно для положительного триггерного входа, на базу транзистора Q3. Отсутствие высокого входного сигнала на базу Q3 отключит Q3, чтобы удалить положительный входной сигнал на базу транзистора Q5, что приведет к прекращению потока положительного напряжения P от коллектора к эмиттеру Q5, тем самым остановив зарядка аккумулятора.
Обнаружено еще одно соединение обратной связи между B+ и входом ОУ второй ступени схемы зарядного устройства. Это предназначено для проверки уровня напряжения на клемме B+ батареи, так что, когда B+ выше, он будет иметь приоритет над низким входным сигналом операционного усилителя второй ступени, что уменьшит усиление этого усилителя, чтобы выключить оба транзисторы Q3 и Q5 для прекращения дальнейшей зарядки аккумулятора.
Очень стабильные опорные напряжения постоянного тока +15 В и -15 В для цепи зарядного устройства обеспечиваются двумя ИС регулятора, ИС регулятора 7815 выдает устойчивое напряжение +15 В, а 7915 IC регулятора отвечает за подачу очень постоянного напряжения -15В.
Для защиты всей электронной схемы от внезапного нарастания мгновенного обратного напряжения с катушки магнита, которое будет течь в направлении, противоположном исходной полярности напряжения питания электромагнита после его выключения, маховик (или обратная связь) диод подключен через катушку электромагнита, чтобы служить шунтом для подавителя обратной ЭДС (электродвижущей силы), который улавливает реверсивный скачок напряжения, замыкая его на катушку магнита, не вызывая повреждения электронных компонентов схемы.
Вам понравилось читать этот пост, тогда рассмотрите возможность подписки по электронной почте на
Technovation — Технологические инновации и передовые технологии промышленного управления
КРАНЫ
ДОМ | О НАС | КРАНЫ | ШИНЫ
УСЛУГИ | СВЯЖИТЕСЬ С НАМИ | КАРЬЕРА
Copyright © Anchor Sales & Service Company, Inc. , 2016.
, 2016.
Все права защищены.
816-836-5900
106 West 31st St,
independence mo 64055
факс:816-836-5999
• Монорельсовые системы (как двутавровые, так и запатентованные)
• Крановые системы для рабочих станций
(свободно стоящие и потолочные
с опорой
• Стреловые краны (настенные консольные, настенные
кронштейн
, отдельно стоящие и мачтовые
Консольные краны типа
• Переносные козловые краны
• Цепные тали (ручные и электрические)
• Канатные тали
• Лебедки
• Краны на заказ
YOU SERVICE 4 YOU SERVICE 4 900 Системы взлетно-посадочных полос 900…
24 ЧАСА В СУТКИ | 7 ДНЕЙ В НЕДЕЛЮ
ANCHOR SALES & SERVICE, INC.
ЗАПРОС ОБСЛУЖИВАНИЯ >>
свяжитесь с нами сегодня!
БЕСПЛАТНЫЕ ЦЕНЫ >>
свяжитесь с нами сегодня!
Будем рады помочь! Нажмите ниже и отправьте нам электронное письмо. мы позаботимся о вас как можно скорее.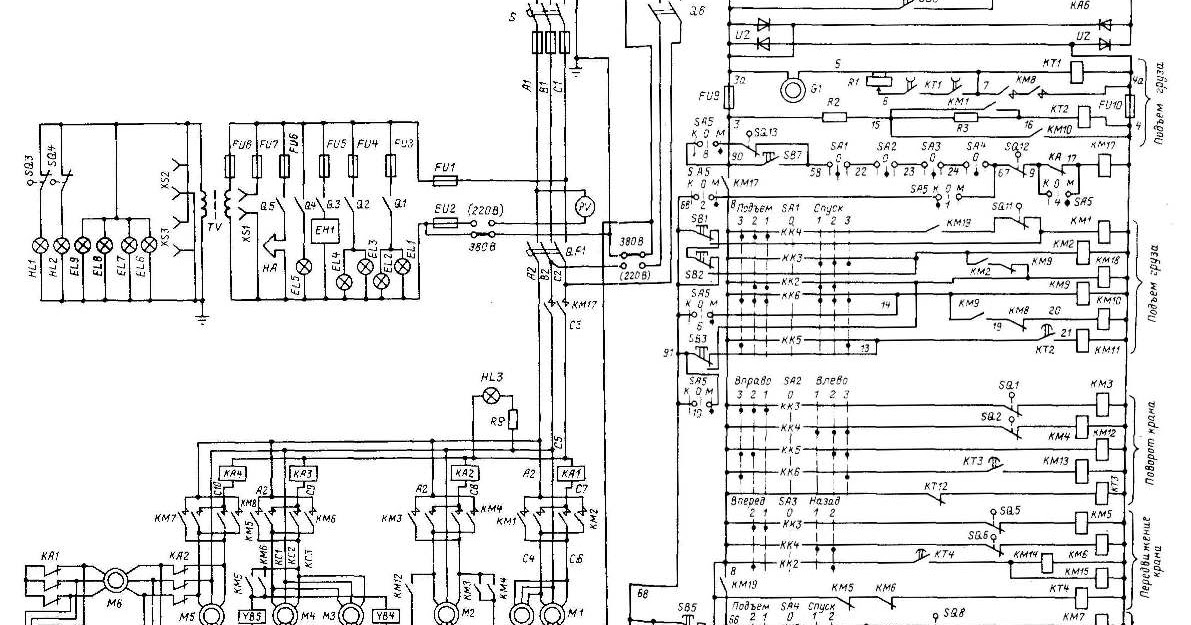
Мы бесплатно рассчитаем все, что вам нужно! нажмите ниже и сообщите нам, что вы хотите.
производство кранов
и индивидуальный дизайн.
Продажа оборудования
и производство
Внутренние
Engineering
Производство
Возможности
Мостовые краны
Анкерные продажи и услуги имеют возможность производителя пользовательских и стандартных кранов, которые интегрируют компоненты из многих продавцов через продвинутый компьютер. технологии. Изготовленные в соответствии с нормами CMAA, ASME, NEC, OSHA, MSHA и ANSI, наши краны опираются на передовые технологии производства и самые высокие стандарты безопасности в отрасли.
Мы обеспечиваем собственное проектирование и предоставляем штампованные чертежи и расчеты из полиэтилена. Наша собственная инженерная поддержка имеет возможность предложить полный набор пользовательских чертежей общего вида AutoCAD, электрических схем и электрических схем для каждого крана, который мы строим.
От новых кранов до модернизации существующих кранов, наше меню крановых решений и услуг разработано для удовлетворения потребностей наших клиентов. Имея большой выбор основных производителей компонентов, мы можем выбрать правильные компоненты для каждого приложения. Наши производители специализируются на производстве, поэтому нет переключения между обслуживанием и производством.
Мы являемся одним из ведущих поставщиков мостовых кранов в стране.
• Верхний работающий один балка
• Верхний работающий двойной балки
• При выполнении отдельного балки
• Гандские краны
• Рабочая станция Crane Systems
• Запатентованные растворы с треками
плюс >>
ДОСТУПНЫ СИСТЕМЫ ПЕРЕМЕЩЕНИЯ!
ГАРАНТИЯ НА ЯКОРЬ
Все краны поставляются с гарантией и гарантией на детали и работу, которая выходит за рамки обычной гарантии на ремонт и замену деталей. Если у вас возникнет проблема в течение 12 месяцев после установки, мы исправим ее бесплатно для вас.
